1
Изобретение относится к автоматическому управлению подвижными объектами в частности к автоматическому управлению, курсом суд ha.
Известен авторулевой (АР), содержащий б сумматор, датчик положения рупя, датчик иотиййого и заданного курса с элементом сравнения. Выход элемента сравнения через операционньтй усилитель и масштабный депитепь подключен к входу сумматора l.Ю
Известен авторулевой типа АВР, в котором кроме перечисленных сигналов, |используется также сигнал, пропорпионвльный интегралу от угла рассогласования курса судна по времени 2.15
Недостатком известных авторулевых является необходимость вьпслючения их при сильном морском волнении, а также повышенный износ рулевого привода при развитом морс- 20 ком волнении.
Наиболее близким по техническому решению к предлагаемому является авторулевой, содержащий датчики угла рассогласования по курсу и угла перекладки руля, выходы кото-. 25
рых подключены к первому и второму входам усилителя, датчик угловой скорости судна, модель угловой сксргхзти судна, вход которой подключен к датчику угла перекладки руля, а выход - к третьему входу усилителя MOQV ности 3j.
В известном авторулевом для сокрашевид количества кладок руля в единицу времени при одновременном улучшения качества ст билизапии использована модель зггловой ско рости судна, что позволяло отказаться от применения сигнала;угловой скорости судяа, обычно получаемого дифференцированием стенала датчика курса.
В известном авторулевом на вход модели угловой скорости судна подается сигнал с датчика угла перекладки руля, а полученный на выходе модели сш нал пропориионален только составляющей угловой скорости суд-; на от управления (угла перекладки руля) S.
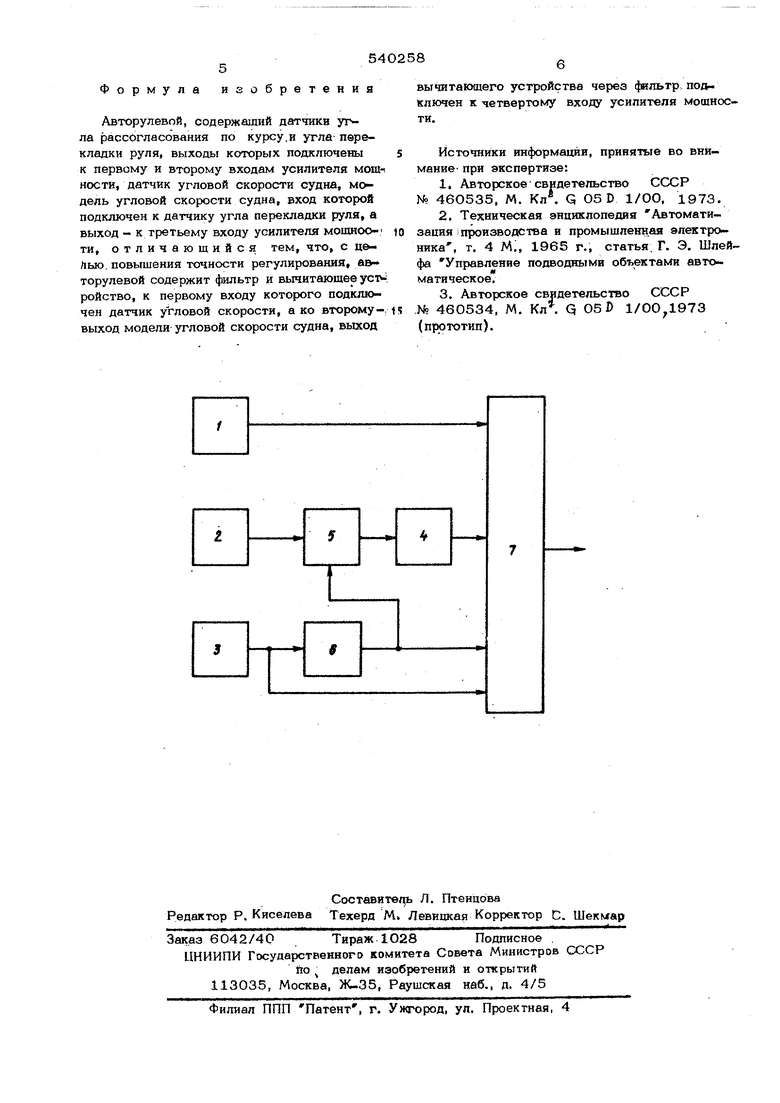
Однако для yпpaвлe ия курсом судна при слабом морском волнении в законе управления |)улевым приводом отсутствует составляющая угловой скорости судна от морского вел немия. Поэтому в случае слабого морского волнения качество стабшгазации ниже, чем при управлении авторулевыми тика Ai ЛСР. Это объясняется тем, Ч1га парирование возмущения от морского волнения происходит топьКО при появлении некоторого рассогласования по углу курса, а в авторулевых АР и АБР управляющее воздействие возникает с некоторым упреждением. Однако при увеличении волнения на море авторулевые типа АР и АБР. обычно выклк чают и переходят на ручное управление курЬом судна. Это диктуется тем, что при сильном морском волнении сигнал управления, перегружен составляющей угловой скорости судна от внешнего возмущения и полностью заби Вает канал управления. Цель изобретения - повышение точности регулирования. Для этого предлагаемый авторулевой содержит фильтр и вычитающее устройство, к первому входу которого подключен датчик yrповой скорости, а ко второму выход моде IИ угловой скорости судна, выход вычитающего устройства через фильтр подключен к четвертому входу усилителя мощности. На чертеже изображена блок- хема , предлагаемого устройства. Авторулевой содержит блок 1 угла рассогласования по курсу, датчик 2 угловой ско рости судна, датчик 3 угла перекладки руля, фильтр 4, рычитающее устройство 5, модель угловой скорости судна, усилитель мощноети 7. Выход блока 1 угла рассогласования по курсу соединен с первым входом усилителя 7 мощности. .Один из выходов датчика 3 перекладки руля соединен с входом усилителя 7 мощности, а другой - ic входом модели б угловой скорости судна. Один из выходов модели 0 угловой скорости судна соеединен с входом усилителя 7 моеаности, дру|гой - с первым входом вычитающего ,ройства 5.Ко второму входу вычитающего устройства подключен выход датчика 2 угло. Ьой скорости судна. Выход вычитающего устройства подключен к входу усилителя 7 мощности через фильтр 4. Устройство работает следующим образом. При отклонении судна от заданного курса на выходе усилителя мощности формируется сигнал, управляющий рулэвым приводом. Руль начинает отклоняться, а под действием отклрненного руля появляется угловая скорость судна. В этом случае на выходе модели угловой скорости судна вырабатывается сое- тавляющая угловой скорости судна от управляющего воздействия - угла перекладки руля. На выходе вычитающего устройства вырабатывается разность сигналов полной угловой скорости судна от датчика угповой скорости судна и сигнала составляющей угловой скорости от управляющего воздействия с выхода модели угловой скорости удна. Эта разность соответствует составля ощей угловой скорости судна от морского волнения (df/dt)(Jt , (df/dt) „ составляющая угловой скорости судна только . от воздействия морско го волнения; -составляющая угловой скорости судна только от воздействия угла перекладки руля; -полная угловая скорость судна. Если морское волнение отсутствует(((р/й )р sQjfo сигнал на выходе вычитающего уст ройства будет равен нулю. Сигнал с выхода модели угловой скорости судна, кроме того, непосредственно поступает на вход усилите- яя мощности. Наличие этого сигнала необходимо для обеспечения требуемого запаса yctтойчивости замкнутой системы {судно-авторулевой-рулевой привод) . На вход усилителя поступает также сигнал от датчика угла перекладки руля, выход вычитающего уст}ройства подключен также к входу усилители мощности через фильтр. Полосу пропускания фильтра подбирают для конкретного типа суаНа такой, чтоб исключить частые перекладки руля при развитом морском волнении. Такой фильтр позволяет резко снизить загрузку рулевого привода при сильном волнении на море и соварщенно не изменяет запаса устойчивости системы судно-авторулевой-рулевой привод. На выходе усилителя мощности в результате формируется сигнал, управляющий рулевым приводом ,и обеспечивающий требуемое качество управления. Предлагаемое устройствопозволяет управлять суднол при любой погоде длительное время. Рулевой привод при этом имеет ограниченную загрузку, что предотвращает его заклинивание, перегрев, повышенный износ и расход энергии. Кроме того, обеспечивае1 ся качество стабилизации судна значительно выше, чем у прототипа, так как в управлении участвует информация об угловой скорости судна от возмущающего воздействия Технико-экономическая .эффективность выражается в сокращении времени рейса на .3-5% и повышенном сроке экеплуатаиии. рулевых приводов, что может дать экономию около 5 тыс. руб. в год на судно.
Формула
обретения
Авторулевой, содержащий датчики угла рассогласования по курсу,и утла перекладки руля, выходы которых подключены к первому и второму входам усилителя мощ-п нести, датчик угловой скорости судна, модель угловой скорости судна, вход которой подключен к датчику угла перекладки руля, а выход - к третьему входу усилителя мошиоо ти, отличающийся тем, что, с ц&Лью. повышения точности регулирования, ав- торулевой содержит фильтр и вычитающее yciv. ройство, к первому входу которого подклк чен датчик угловой скорости, а ко второму-, выход модели угловой скорости судна, выход
вычитающего устройства через фильтр по/ ключей к четвертому входу усилителя мощности.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство
№ 460535, М. Кл. Q О5 D 1/00. 1973.
2.Техническая энциклопедия Автоматизация i производства и промыщленная электроника, т. 4 Mi, 1965 г., статья. Г. Э. Шлефа Управление подводными объектами автоматическое
СССР
3.Авторское свидетельство ,№ 460534, М. Кл . Q O5D 1/00,1973
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1981 |
|
SU1095803A1 |
| Авторулевой | 1983 |
|
SU1183944A2 |
| Авторулевой | 1977 |
|
SU651321A2 |
| Авторулевой | 1978 |
|
SU774411A1 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| Авторулевой | 1987 |
|
SU1529181A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| Авторулевой | 1973 |
|
SU460534A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
