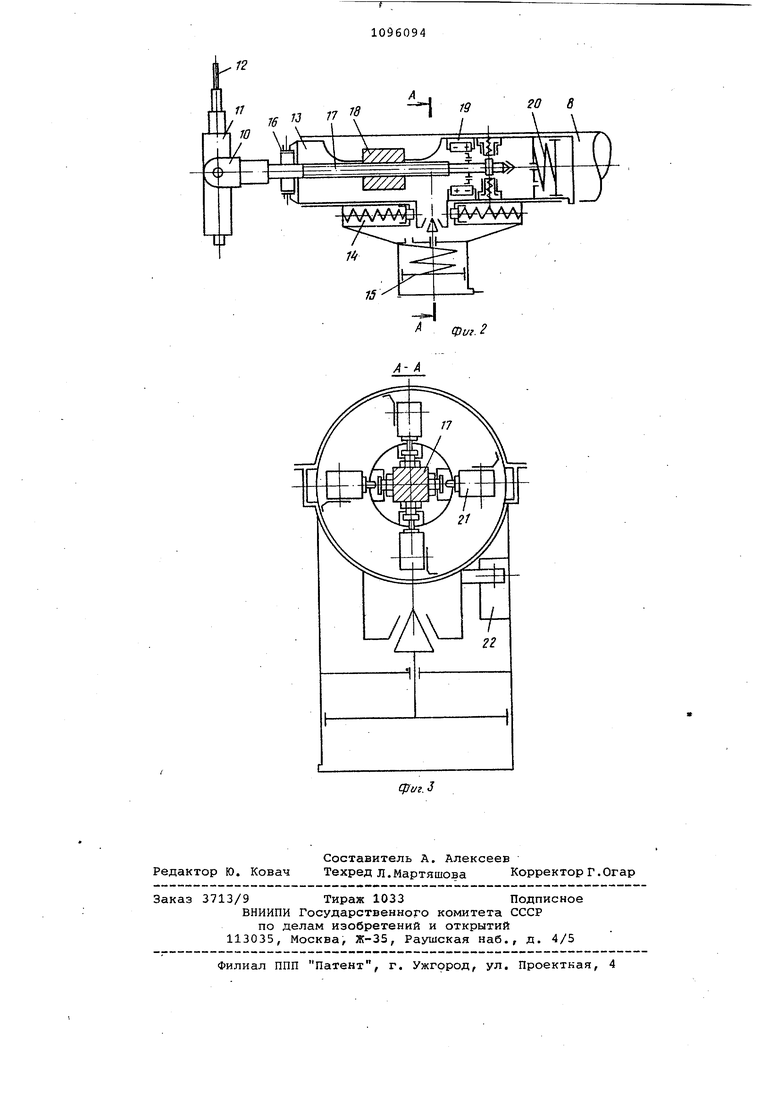
Изобретение относится к машиностроению, в частности к роботам и манипуляторам со следящей системой и предназначено для механизации тех нологических операций, выполняемых при монтажно-сборочных работах, на пример сверление и упрочнение отверстий в агрегатах одинарной и двойной кривизны, точечная сварка, клепка. Известен манипулятор с ручным управлением, содержащий платформу, трехкоординатный исполнительный ме ханизм с приводом, технологическую головку и систему управления с датчиками положения технологической головки Си. Недостатками известного манипулятора являются низкая производител ность и неудобство в управлении. Цель изобретения - повышение про изводительности и улучшение условий труда оператора. Указанная цель достигается тем, что манипулятор с ручным управление содержащий платформу, трехкоординат ный исполнительный механизм с приводом, технологическую головку и систему управления с датчиками положения технологической головки, снабжен ползушкой с установленным в ней на двух взаимно перпендикулярны осях коромыслом с уравновешивающим грузом и фиксаторами нейтрального положения ползушки и коромысла, при чем ползушка и коромысло связаны с датчиками системы управления., а тех нологическая холовка шарнирно закре лена на коромысле. На фиг. 1 изображен манипулятор с ручным управлением, общий вид; на фиг, 2 - устройство отслеживания; на фиг. 3 - сечение А-А на фиг. 2. Манипулятор состоит (фиг. 1) из платформы 1, на которой установлены гидростанции 2 с пультом 3 управления и исполнительный механизм 4 с приводами от гидроцилиндров 5-7 по трем координатным осям. На штоке 8 гидроцилиндров 7 установлено устрой ство 9 отслеживания, двухкоординатное поворотное устройство 10 и технологическая головка 11 с инструментом 12. Устройство отслеживания включает ползушку 13 с механизмами 14 и 15 центрирования и фиксации соответственно в нейтральном положении, установленное на двух взаимно перпендикулярных осях 16 коромысло 17 с уравновешивающим грузом 18 и механизмы 19 и 20 центриро вания и фиксации соответственно ко ромысла в нейтральном положении. Отклонение ползушки 13 и коромысла 17 от нейтрали служит командой для работы гидроприводов по трем координатам от датчиков 21 и 22. Манипулятор с применением устройства отслеживания работает следующим образом. Платформа1 с расположенным на ней оборудованием транспортируется по опорной поверхности в заданное место к обрабатываемой детали и фиксируется в этом положении. Далее оператор с пульта управления 3 включает электрогидравлическую систему исполнительного механизма 4 и устройство 9 отслеживания и, удерживая технологическую головку 11 за ручку и корпус, смещает ее относительно нейтрального положения, задаваемого механизмами 14 и 19 центрирования, в сторону нужного направления подачи. При этом коромысло 17 поворачивается относительно осей 16 и подает с помощью датчиков 21 команду На гидропривод вертикальной 5 и горизонтальной б подачи, а ползушка 13, смещенная вдоль штока 8 относительно нейтрали, дает команду от датчика 22 на гидропривод горизонтальной подачи 7, Одновременно с перемещением технологической головки 11 по трем осям оператор разворачивает ее в двухкоординатном поворотном устройств-е 10 и обеспечивает таким образом ориентацию инструмента 12 относительно детали одновременно по всем пяти координатам. Затем фиксирует установленное положение технологической 1ГОЛОВКИ 11 с поворотным устройством 10, а также положение коромысла 17 и ползушки 13 механизмами 15 и 20 фиксации и включает рабочую подачу инструмента. После обработки цикл настройки инструмента на новое отверстие повторяется. Работа гидросистемы манипулятора обеспечивается гидростанцией 2, а балансировка технологической головки 11 и коромысла 17 осуществляется уравновешивающим грузом 18. i . Предлагаемая схема манипулятора обеспечивает рациональные условия труда при обработке отверстий с переменным направлением осей по разметке или кондуктору.
го в
фиг. 2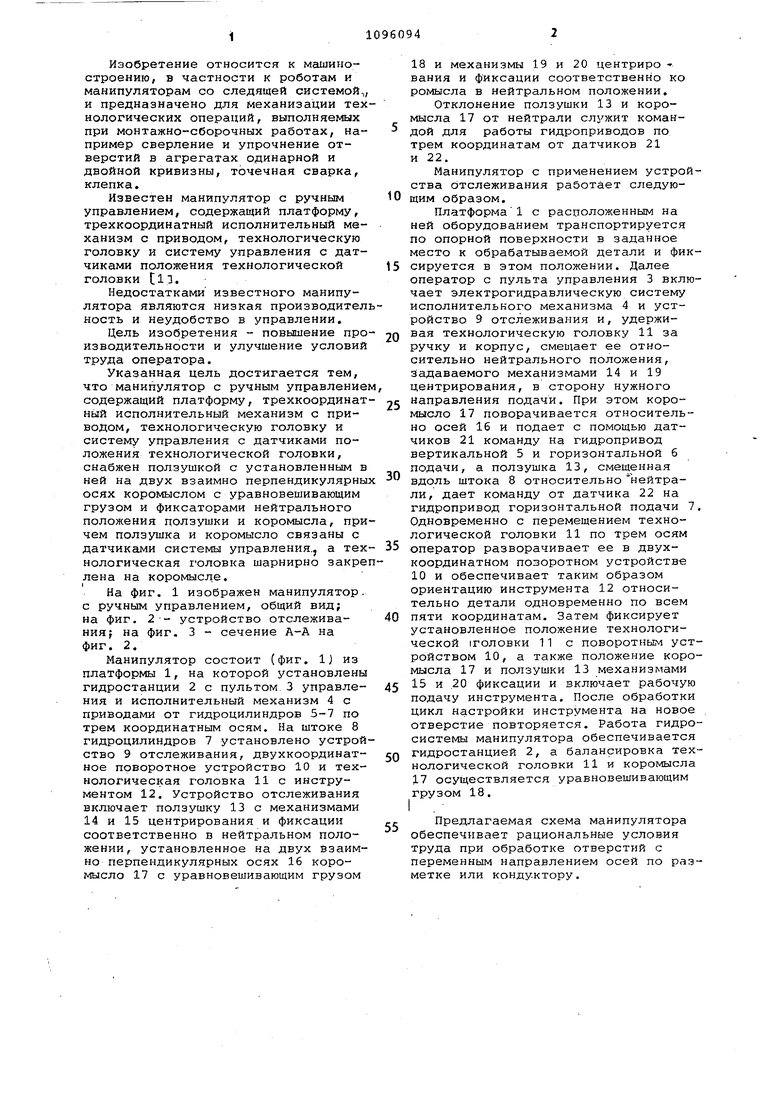
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU984857A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Манипулятор | 1986 |
|
SU1303395A2 |
| Манипулятор | 1985 |
|
SU1255423A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| Манипулятор | 1989 |
|
SU1720853A1 |
| РАСПРЕДЕЛИТЕЛЬНЫЙ ДВУЗНАЧНЫЙ ТАНДЕМ ЗОЛОТНИКОВ С ЛОГИЧЕСКОЙ ФУНКЦИЕЙ "ТО..., ТО" | 2002 |
|
RU2251029C2 |
| МАШИНА МАНИПУЛЯТОРНАЯ | 2009 |
|
RU2420952C1 |
| МАНИПУЛЯТОР "САМОХОДНАЯ ЧЕРЕПАХА ПРОХОРОВА WONDERTURTLE" (ВАРИАНТЫ) | 1999 |
|
RU2197746C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
МАНИПУЛЯТОР С РУЧНЫМ УПРАВЛЕНИЕМ, содержащий платформу, трехкоординатный исполнительный механизм, с приводом, технологическую головку и систему управления с датчиками полоу енмя технологической головки, о т личающийся тем, что, с целью повышения производительности и улучшения условий труда оператора, он снабжен ползушкой с установленным в ней на двух взаимно перпендикулярных осях коромыслом с уравновешивающим грузом и фиксаторами нейтрального положения ползушки и коромысла, причем ползушка и коромысло связаны с датчиками системы управления, а технологическая головка шарнирно закреплена на коромысле. (Л d О о со 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор для монтажно-сборочных работ | 1976 |
|
SU631329A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
