wis Фиг. 5
Изобретение относится к устройствам, автоматизирующим технологические процессы в строительстве, металлообработке, на погрузочно-разгрузочных работах, а именно к устройствам для манипулирования грузами на вредных и опасных для здоровья работах.
Целью изобретения является повышение грузоподъемности.
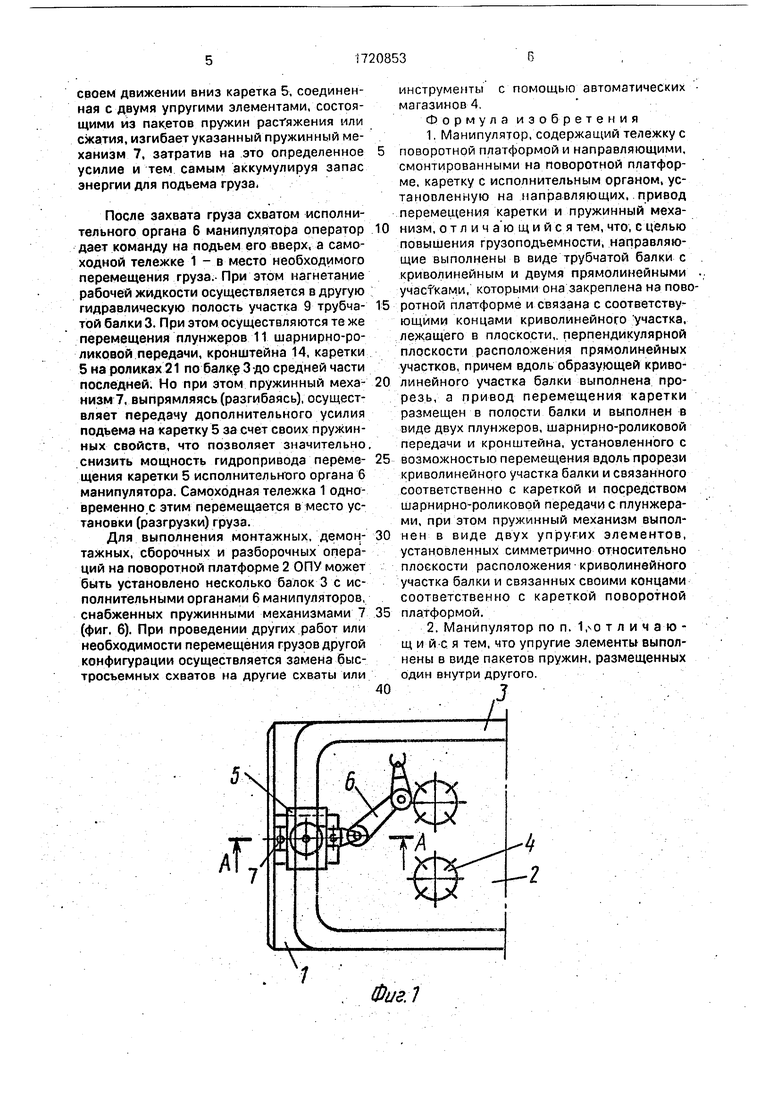
На фиг. 1 представлен манипулятор, общий вид, на фиг. 2 - направляющая балка с приводом манипулятора; на фиг. 3 - кронштейн с кареткой исполнительного органа манипулятора; на фиг. 4 - разрез А-А на фиг. 1; на фиг. 5 - манипулятор с двумя исполнительными органами, общий вид; на фиг. 6 - то же, вариант выполнения.
Манипулятор состоит из дистанционно управляемой тележки 1, аппаратуры контроля и управления (не показан), поворотной платформы 2, на которой размещены направляющие в виде трубчатой балки 3, автоматические магазины 4 со сменными схватами и инструментами. На трубчатой балке 3 установлена каретка 5 с исполнительным о.рганом б манипулятора и приводом ее перемещения, а на каретке 5 расположен пружинный механизм 7. Трубчатая балка 3 выполнена в виде криволинейного 8 и двух прямолинейных 9 участков, последние из которых смонтированы на поворотной платформе 2, причем каждый конец криволинейного участка 8 жестко связан с концом соответствующего прямолинейного участка. 9,- э плоскость его расположения перпендикулярна плоскости расположения прямолинейных участков. Вдоль образующей криволинейного участка 8 балки 3 выполнена прорезь 10.
Привод перемещения каретки 5 выполнен в виде силового цилиндра двустороннего действия, например гйдроцилиндра, размещенного внутри прямолинейных участков 9 трубчатой балки .3-, двух плунжеров 11, соединенных шарнирно с роликами 12 сферической формы шарнирно-роликовой передачи. Ролики 12 соединены между собой шарнирно с помощью пластинчатых звеньев 13. На среднем пластинчатом звене 13 (посредине шарнирно-роликовой передачи) жестко установлен кронштейн 14, имеющий возможность перемещения по продольной прорези 10 в трубчатой балке 3. В кронштейне 14 выполнены отверстия 15 для соединения с кареткой 5 исполнительного органа б манипулятора.
Пружинный механизм 7 выполнен в виде двух упругих элементов 16, установленных симметрично относительно плоскости кривизны балки 3 и связанных своими концами 17 и 18, соответственно, с кареткой 5 и поворотной платформой 2. Упругие элементы 16 выполнены в виде пакетов пружин, размещенных один внутри другого.
От гидростанции (не показана); расположенной на ОПУ или самоходной тележке 1, проведены рукава 19 для подвода, рабочей жидкости к платформе 20 каретки 5. Рукава 19 размещены внутри упругих эле0 ментов 16с целью защиты их от повреждения. На каретке 5 установлены две пары роликов 21 сверху и снизу от балки 3 для перемещения их по наружной поверхности последней.
5 Управление манипулятором осуществляется в непосредственной близости от манипулятора (5-10 м)-с помощью переносной аппаратуры управления или на значительном удалении от объекта с помощью
0 аппаратуры контроля, принимающей необходимую информацию от. приборов, размещенных на борту самоходной тележки (зрительный, звуковой, химический, радиационный контроль и т.д.),
5 Манипулятор работает следующим образом.
Рассмотрим работу манипулятора на примере подъема, перемещения и установки тяжелого груза (детали) при известной
0 предварительной оадиационной, химической или другой обстановке. Определив месторасположение нужного груза (детали), перемещают с помощью пульта управления самоходную тележку 1 манипулятора в тре5 буемое место.
Исполнительный орган 6 манипулятора в исходном положении расположен в средней части трубчатой балки 3 в максимально сложенном положении и застопорен отсе0 ченной в гидравлических полостях прямоли- нейных участков 9 балки 3 рабочей жидкостью (с помощью аппаратуры включения гидропривода). При включении гидропривода каретки 5 исполнительного органа
5 6 манипулятора плунжер 11 перемещается поступательно по гидравлической полости) перемещая при своем движении шарнирно- роликовую передачу, имеющую высокий КПД благодаря низкому коэффициенту тре0 ния качения сферических роликов 12 по. внутреннему отверстию трубчатой балки 3. Перемещаются также звенья 13 и кронштейн 14, скользящий по продольной прорези 10 балки 3,
5 Кронштейн 14 соединен через отверстия 15 с кареткой 5 исполнительного органа б манипулятора, которая опускается по балке 3 с верхней средней частью в нижнюю ветвь балки-арочной формы до упора кронштейна 14 в торец прорези 10 (фиг. 2). При
своем движении вниз каретка 5, соединенная с двумя упругими элементами/состоящими из пакетов пружин растяжения или сжатия, изгибает указанный пружинный механизм 7, затратив на это определенное усилие и тем самым аккумулируя запас энергии для подъема груза,
После захвата груза охватом исполнительного органа 6 манипулятора оператор дает команду на подъем его вверх, а самоходной тележке 1 - в место необходимого перемещения груза. При этом нагнетание рабочей жидкости осуществляется в другую гидравлическую полость участка 9 трубча- той балки 3. При этом осуществляются те же перемещения плунжеров 11 шарнирно-роликовой передачи, кронштейна 14, каретки 5 на роликах 21 по балке 3 -до средней части последней. Но при этом пружинный меха- низм 7, выпрямляясь (разгибаясь), осуществляет передачу дополнительного усилия подъема на каретку 5 за счет своих пружинных свойств, что позволяет значительно снизить мощность гидропривода переме- щения каретки 5 исполнительного органа 6 манипулятора. Самоходная тележка 1 одновременно.с этим перемещается в место установки (разгрузки) груза.
Для выполнения монтажных, демон- тажных, сборочных и разборочных операций на поворотной платформе 2 ОПУ может быть установлено несколько балок 3 с исполнительными органами 6 манипуляторов, снабженных пружинными механизмами 7 (фиг. 6). При проведении других работ или необходимости перемещения грузов другой конфигурации осуществляется замена быс- тросъемных схватов на другие схваты или
инструменты с помощью автоматических магазинов 4,
Формула изобретения
1.Манипулятор, содержащий тележку с поворотной платформой и направляющими, смонтированными на поворотной платформе, каретку с исполнительным органом, установленную на направляющих, привод перемещения каретки и пружинный механизм, от л и ч а ю щи и с я тем, что, с целью повышения грузоподъемности, направляющие выполнены в виде трубчатой балки с криволинейным и двумя прямолинейными участками, которыми она закреплена на повротной платформе и связана с соответствующими концами криволинейного участка, лежащего в плоскости,, перпендикулярной плоскости расположения прямолинейных участков, причем вдоль образующей криволинейного участка балки выполнена прорезь, а привод перемещения каретки размещен в полости балки и выполнен в виде двух плунжеров, шарнирно-роликовой передачи и кронштейна, установленного с возможностью перемещения вдоль прорези криволинейного участка балки и связанного соответственно с кареткой и посредством шарнирно-роликовой передачи с плунжерами, при этом пружинный механизм выполнен в виде двух упругих элементов, установленных симметрично относительно плоекости расположения криволинейного участка балки и связанных своими концами соответственно с кареткой поворотной платформой.
2.Манипулятор по п. 1,о т л и ч а ю - щ и и с я тем, что упругие элементы выполнены в виде пакетов пружин, размещенных один внутри другого.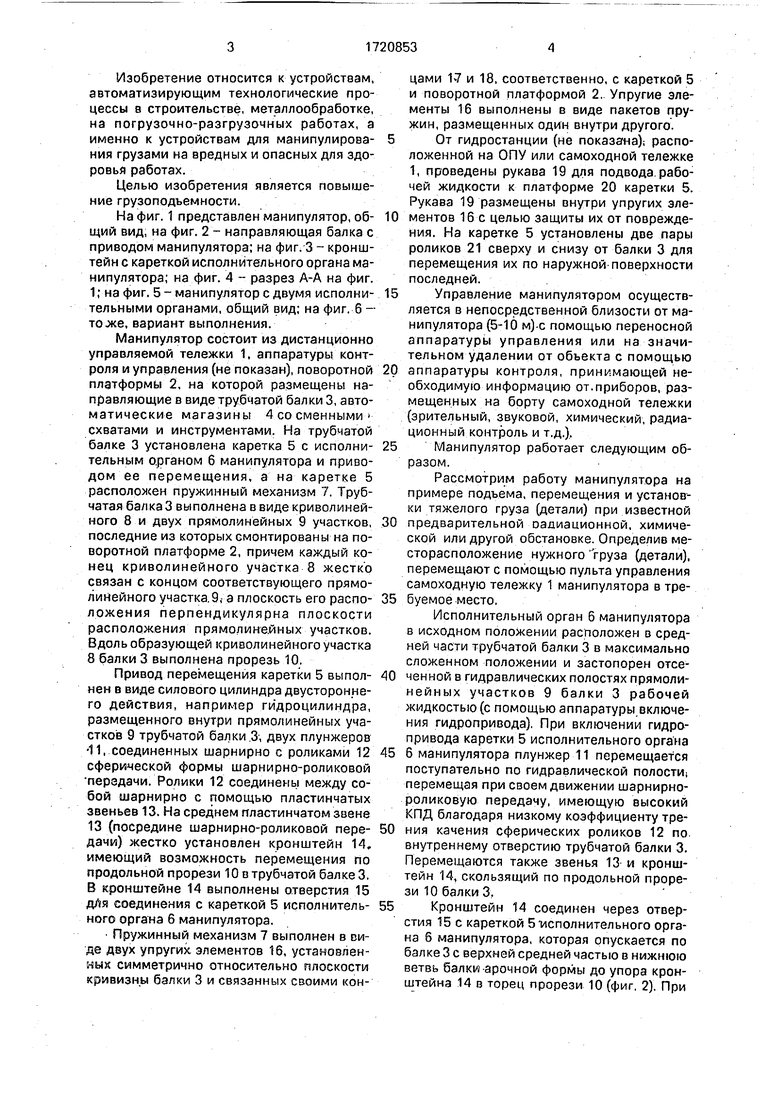


Изобретение относится к устройствам, автоматизирующим технологические процессы в строительстве, металлообработке, на погрузочж -разгрузочных работах, а именно к устройствам для манипулирования грузами на вредных и опасных для здоровья работах. Целью изобретения является повышение грузоподъемности. Манипулятор состоит из дистанционно управляемой тележки 1, поворотной платформы 2, установленной на тележке 1 и несущей направляющие в виде трубчатой балки 3, криволинейный участок которой расположен перпендикулярно плоскости расположения прямолинейных участков, закрепленных на поворотной платформе 2. В полости прямолинейных участков балки размещен привод перемещения каретки 5, несущей исполнительный орган 6 манипулятора. Привод перемещения каретки выполнен в виде силового цилиндра двустороннего действия, плунжеры которого связаны посредством шарнирно-роликовой передачи с кронштейном, жестко связанным с кареткой 5. Для облегчения подъема груза каретка 5 связана с поворотной платформой 2 посредством пружинного механизма 7 в виде двух упругих элементов, установленных симметрично относительно плоскости расположения криволинейного участка трубчатой балки 3. Упругие элементы выполнены в виде пакетов пружин, установленных один в другом. 1 з.п. ф-лы, 6 ил. сл с
ФиеЛ
00
©}
j
I &
С980Ш
Фиг.б
| Манипулятор | 1988 |
|
SU1565686A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
