i
Изобретение относится к машиностроению, а именно к рабочим технологическим машинам, применяемым при выполнении технологических операций типа сверления отверстий в деталях 5 с двойной кривизной поверхности.
Целью изобретения является повышение производительности за счет сокращения времени ориентации инструмента относительно обрабатываемой поверх- Ю кости.
На фиг. 1 представлен манипулятор общий вид; на фиг, 2 - А-А на фиг. 1; на фиг.3-схема перемещения инструмента.15
Манипулятор состоит из платформы 1, шарнирно связанного с ней основного гидроцилиндра 2 со штоком 3, двух поворотных гидроцилиндров 4, шарнирно связанных с платформой и с ос- 20 новным гидроцилиндром, трехкоординат ной ручки 5 управления гидроцилиндрами 2 и 4, закрепленной на штоке 3, планшайбы 6, установленной с возможностью поворота на штоке 3 и снабжен- 25 ной направляющими 7, на которых установлена рабочая головка 8 с инструментом 9. Направляющие 7 выполнены криволинейными с центром радиуса кривизны на конце инструмента. На боковой наружной поверхности планшайбы 6 выполнен зубчатый венец 10, а на штоке 3 закреплен кронштейн 11 с приводом 12, на выходном валу которого установлено с возможностью взаимодействия с зубчатым венцом 10 зубчатое колесо 13. Между направляющими 7 размещен ходовой винт 14 с приводом 15. На одном торце рабочей головки 8 выполнены направляющие 16 и резьбовой элемент 17, контактирующие соответственно с криволинейными направляющими . 7 и ходовым винтом 14. На другом торце рабочей г оловки закреплены рабочий инструмент 9, взаимодействующий с обрабатываемой деталью 18, и три щупа 19-21 с датчиками. На рабочей головке установлена поворотная обойма 22 с ручкой 23 пода чи инструмента.
Работа манипулятора при обработке отверстий в поверхностях двойной кривизны осуществляется следуюш;им об- разом.
Платформа 1 транспортируется по опорной поверхности в заданное место
1255423J
в требуемую для обработки зону. При
30
35
40
45
50
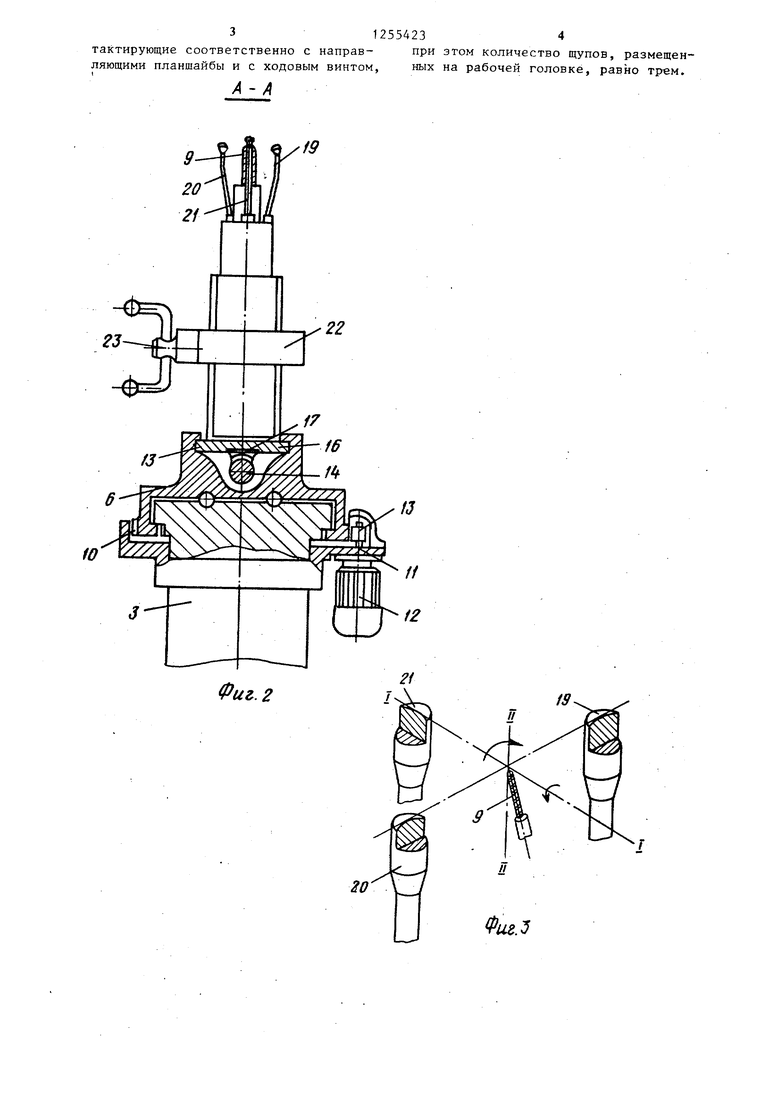
касании щупов 19-21 обрабатываемой поверхности включается следующая сис тема, которая управляет приводами 12 и 15 и основным гидроцилиндром 2. Пр воды 12 и 15 перемещают рабочую головку 8 по направляющим 7, тем самым обеспечивая разворот головки относительно оси I-I (фиг.З), и вращают планшайбу 6 вокруг оси II-II. Этим обеспечивается ориентация инструмента 9 по нормали к поверхности детали 18. Необходимое расстояние от инструмента 9 до детали 18 вьщерживает ся основным гидроцилиндром 2.
Далее устанавливают поворотную обойму 22 .с ручкой 23 подачи инструмента в удобное для работы положение -И производят требуемую по технологии обработку отверстия.
Формула .изобретения
Манипулятор, содержащий платформу основной и два дополнительных силовы цилиндра, шарнирно связанных с платформой и между собой, а также рабочу головку с инструментом и с приводами ее пов.орота и трехкоординатную ручку управления силовыми цилиндрами, размещенные на штоке основного цилиндра и щупы с датчиками следящей системы управления, размещенный на рабочей головке со стороны инструмента, о т- личающийся тем, что, с целью повышения производительности за счет сокращения времени ориентаци инструмента относительно обрабатывае мой поверхности детали, он снабжен планшайбой, расположенной на конце штока основного цилиндра с возможностью поворота относительно его оси на наружной боковой поверхности которой выполнен зубчатый венец, а на торце выполнены криволинейные направляющие, центр радиуса кривизны которых расположен на конце инструмента, при этом между направляющими размещен вве- дейный ходовой винт с индивидуальным приводом его вращения, закрепленным на торце направляющих, а на конце штока основного силового цилиндра закреплен дополнительный кронштейн с приводом, на выходном звене которо го закреплено с возможностью взаимодействия с зубчатым венцом планшайпод обрабатываемым агрегатом и фикси- 55 бы зубчатое колесо, а на рабочей горуется в этом положении. Далее оператор с помощью трехкоординатной ручки 5 управления перемещает головку 8
5
0
5
0
5
0
касании щупов 19-21 обрабатываемой поверхности включается следующая система, которая управляет приводами 12 и 15 и основным гидроцилиндром 2. Приводы 12 и 15 перемещают рабочую головку 8 по направляющим 7, тем самым обеспечивая разворот головки относительно оси I-I (фиг.З), и вращают планшайбу 6 вокруг оси II-II. Этим обеспечивается ориентация инструмента 9 по нормали к поверхности детали 18. Необходимое расстояние от инструмента 9 до детали 18 вьщерживает- ся основным гидроцилиндром 2.
Далее устанавливают поворотную обойму 22 .с ручкой 23 подачи инструмента в удобное для работы положение -И производят требуемую по технологии обработку отверстия.
Формула .изобретения
Манипулятор, содержащий платформу, основной и два дополнительных силовых цилиндра, шарнирно связанных с платформой и между собой, а также рабочую головку с инструментом и с приводами ее пов.орота и трехкоординатную ручку управления силовыми цилиндрами, размещенные на штоке основного цилиндра., и щупы с датчиками следящей системы управления, размещенный на рабочей головке со стороны инструмента, о т- личающийся тем, что, с целью повышения производительности за счет сокращения времени ориентации инструмента относительно обрабатываемой поверхности детали, он снабжен планшайбой, расположенной на конце штока основного цилиндра с возможностью поворота относительно его оси, на наружной боковой поверхности которой выполнен зубчатый венец, а на торце выполнены криволинейные направляющие, центр радиуса кривизны которых расположен на конце инструмента, при этом между направляющими размещен вве- дейный ходовой винт с индивидуальным приводом его вращения, закрепленным на торце направляющих, а на конце штока основного силового цилиндра закреплен дополнительный кронштейн с приводом, на выходном звене которого закреплено с возможностью взаимодействия с зубчатым венцом планшайловке с торца, противоположного расположению инструмента, выполнены направляющие и резьбовой элемент, кон312554234
тактирующие соответственно с направ- при этом количество щупов, размещен- ляющими планшайбы и с ходовым винтом, ных на рабочей головке, равно трем.
А-А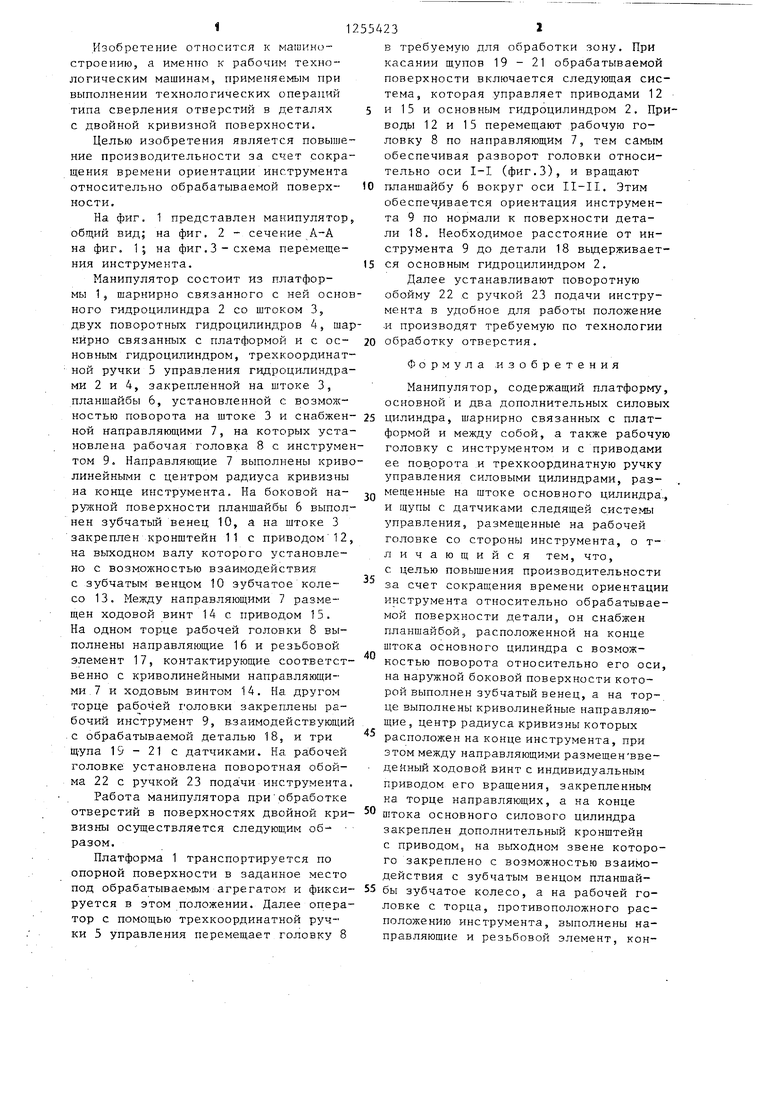
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU984857A1 |
| Устройство для обработки отверстий в панелях двойной кривизны | 1983 |
|
SU1138260A1 |
| Расточной станок | 1977 |
|
SU627924A1 |
| Манипулятор с ручным управлением | 1983 |
|
SU1096094A1 |
| Устройство для сверления и зенкерования отверстий в панелях двойной кривизны | 1982 |
|
SU1018811A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Установка для обработки отверстий | 1985 |
|
SU1298049A1 |
| ГИДРОКОПИРОВАЛЬНАЯ БАБКА | 1971 |
|
SU295612A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| Силовая головка для многопроходной обработки внутренних поверхностей | 1983 |
|
SU1085698A1 |
Изобретение относится к машиностроению и позволяет повысить точность ориентации инструмента рабочих машин типа манипуляторов для обработки отверстий в поверхностях двойной кривизны летательных аппаратов. Реверсивные приводы 12 и 15 перемещают рабочую головку 8 по направляющим 7 и вращают планшайбу 6, обеспечивая тем самым ориентацию инструмента 9 по нормали к детали 18. Необходимое расстояние от инструмента 9 до детали 18 выдерживается основным гидроцилиндром 2, 3 ил. О « (Л
19
Фиг.
| Манипулятор | 1981 |
|
SU984857A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
