Изобретение относится к мацшностроению, а именно к рабочим технологическим машинам у которых с помсяцью манипуляторов осуществляется взаимная ориентация обрабатываемой детали и инструмента под непосредственшлм управлением рабочего.
Известен манипулятор, содержащий исполнительный механизм, выполненный в.виде трехстержневой системы, каждый Стержень которой содержит золотник, один конец которого шарнирно связан со штоком силового цилиндра, а другой - шарнирно с рукояткой управлен|1я, размещенной в точке пересечения стержней, а на звеньях стержней смонтированы элементы, предназначенные для крепления рабочего инструмента fl .
Недостатком известного манипулятора является низкая производительность, связаниая с длительностью ориентации инструмента.
Цель изобретения - повышение производительности.
Поставленная цель достигается тем, что манипулятор дополнительно содеЕ жит следящую систему, выполйенную в виде упоров, датчиков, взаимодействующих с этими упорами двух пар
щупов и двух приводов поворота рабочей головки вокруг взаимно перпендикулярных осей, при этом щупы каждой пары расположены на рабочей головке соответственно по обе стороны or осей ее поэорота, один датчик.и упор установлены каждый на щупах одной из пар с возможностью взгии.юдействия между собой, при этом указанtoный датчик связан с одним приводом поворота рабочей головки вокруг оси, по обе стороны которой расположены щупы, два упора расположены каждый на ciynax другой пары, а два других
15 датчика расположены на рабочей головке и взаимодействуют с этими упорами, при этом один из этих датчиков связан с вторым приводом поворота рабочей головки, а другой с испол20нительньп механизмом.
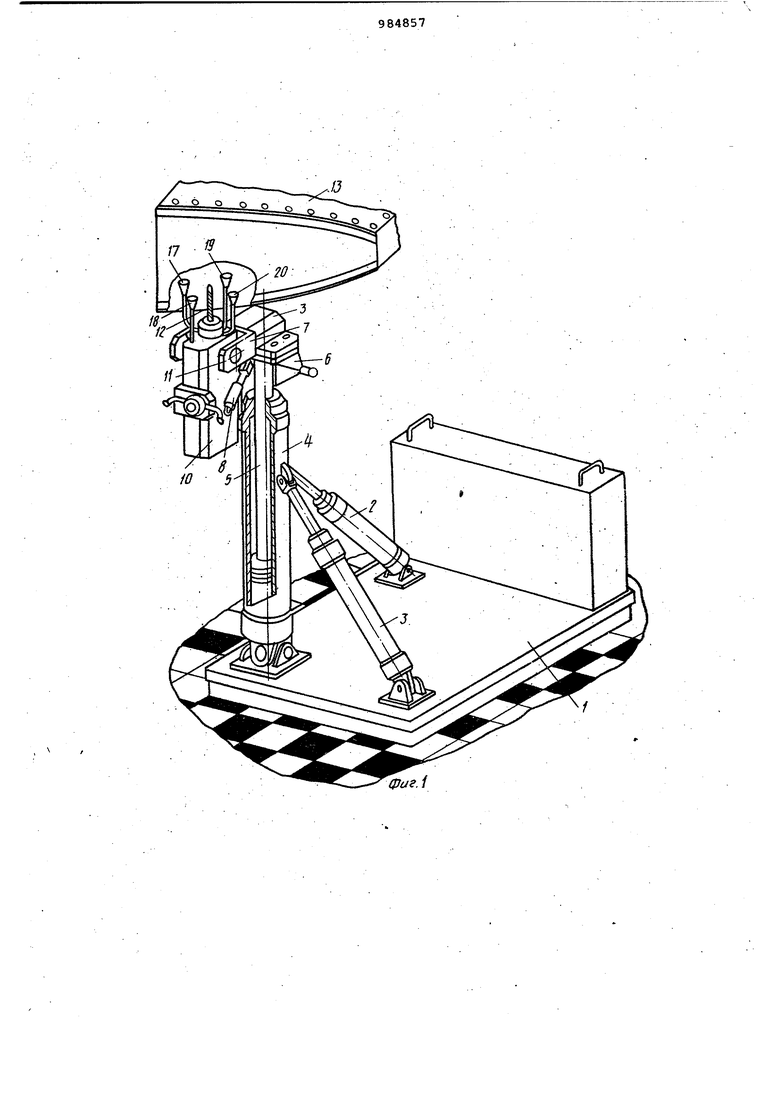
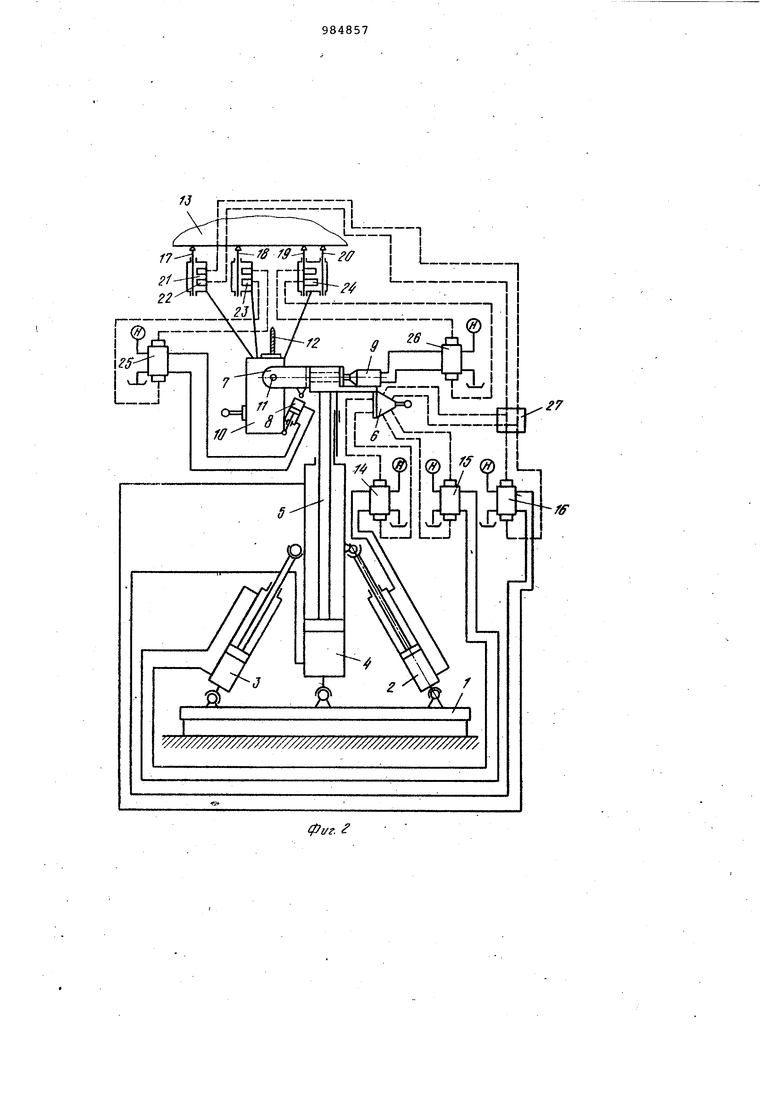
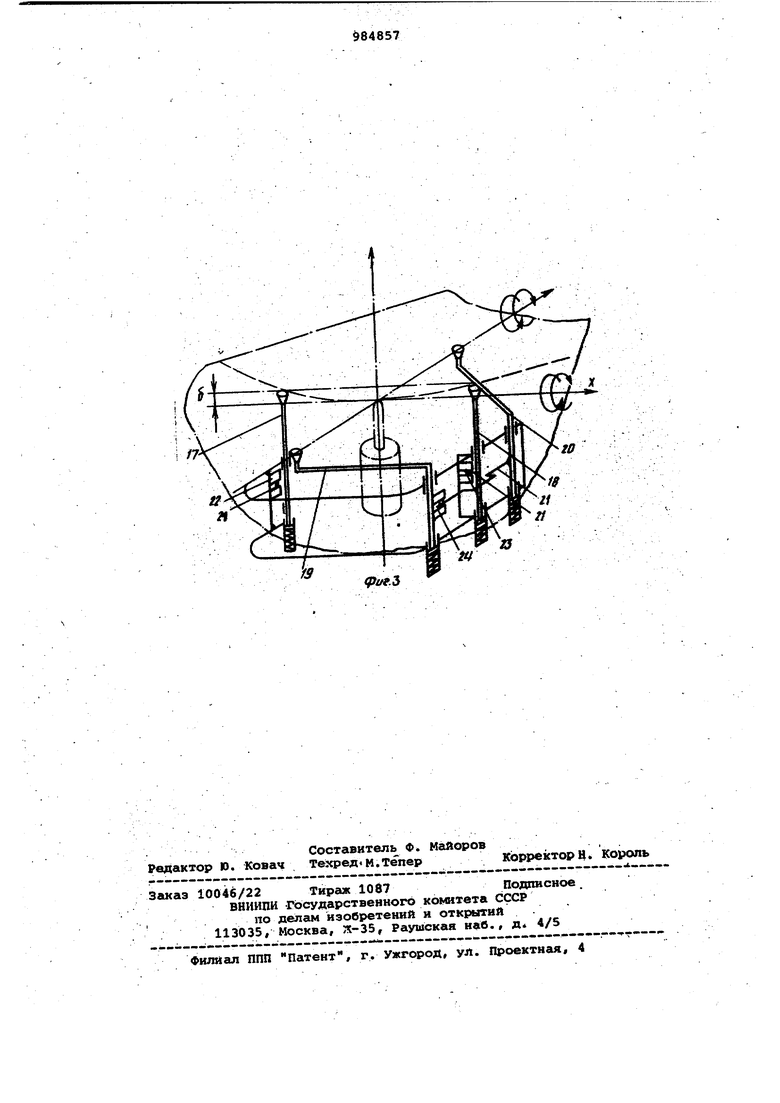
На фиг. 1 изображ|4Н манипулятор, общий вид на фиг. 2 - принципиальная схема управления на фиг. 3 схема расположения датчиков следя25щей си стеки.
Манипулятор состоит из платфор 1 (фиг. 1 и 2), двух поворотных гидроцилинддаов 2 и 3, основного цилиндра -4 со штоком 5, на котором установ30лена трехкоордннатная ручка б управления и поворотное устройство 7с реверсивными приводами 8 и 9 для ориентации рабочей головки 10 с ось 11 вокруг двух взаимно перпендикуля ных осей,. Для взаимной ориентации инструмента ,12 и детали 13 служат трехкоординатная ручка 6 управления с золотниками 14 16 и трехкоординатная следящая система, которая включает в себя подпружиненные щупы 17-20 (фиг. 3) с закрепленными на них упорами 21, датчики 22-24 и золотники 25, 26 и 16, последний из которых связан с трехкоординатно ручкой 6 и датчиком 22 через переключаюцее реле 27. Датчик 24 жестко закреплен на щупе 19 и имеет возможность перемещаться вместе со щупами, что позво1ляет -иметь переменную точку ртсчета одной координаты и вносить поправку 5. , учитывая кривизну детали, Работа с манипулятором осуществл ется следующим образом. При включенной следящей системе управления оператор с помощью трехкоординатной ручки 6 управления под ет команды на золотники 14-16 и ори ентирует рабочую головку 10 манипул тора в пространстве, подводя инстру мент 12 к детали 13. При касании детали 13 одним из щупов 17-20. через упоры 21 автоматически включается следящая система, причем управление штоком 5 осно ного гидроцилиндра 4 посредством реле 27 передается с ручки 6 управл ния следящей системе, которая через золотники 25, 26 и 16 управляет рев сивными приводами 8 и- 9 поворотного устройства 7 и штоком 5 основного гидроцилиндра 4. Реверсивные приводы, вращая рабо чую головку 10, обеспечивают защанную ориентацию инструмента 12 относительно детали 13 по углам. При этом необходимое расстояние от инст румента до детали выдерживается што ком 5 основного гидроцилиндра 4, гидравлика к которому подводится от электромагнитного золотника 16, управляемого от щупа 17. Таким образом, следящая система артоматически обеспечивает ориентацию инструмента 12 относительно поверхности обработки детали 13 и заданное расстояние от нее, а с помощью трехкоординатной ручи 6 управления можно смещать инструмент 12 по поверхности детали 13 с целью настройки на заданную точку, например направляющее отверстие. При этом гидравлика в гидроцилиндры 2 и 3 подается через золотники 14 и 15, работающие от трехкоординатной ручки 6 управления, , Применение предлагаемого манипулятора особенно эффективно при обработке деталей двойной кривизны и при значительных технологических усилиях. Использование манипулятора повышает качество обработки и снижает трудоемкость, Формупа изобретения Манипулятор, содержа1чий платформу, исполнительный механизм с приводом, трехкоординатную ручку управления и рабочую головку, о т л и -; чающийся тем, что, с целью повышения производительности, он содержит следящую систему, выполненную в виде упоров, датчиков, взаимодействующих с этими упорами двух пар щупов и двух приводов поворота рабочей головки вокруг взаимно перпендикулярных осей, при этом щупы каждой пары расположены на рабочей головке соответственно по обе стороны от осей ее поворота, один датчик и yffop установлены каждый на й$упах одной из пар с возможностью взаимодействия между собо, при этом указанный датчик связан с одним приводом поворота рабочей головки вокруг оси, по обе стороны которой расположены щупы, два упора расположены каждый на щупах другой пары, кроме того, два других датчика расположены на рабочей головке с возможностью взаимодействия с последними из указанных упорами при этом один из этих датчиков связан с вторым приводом поворота рабочей головки, а другой - с исполнительным механизмом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 631329, кл, В 25 J 3/00, 1978.
фиг. г
27
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1255423A1 |
| Манипулятор с ручным управлением | 1983 |
|
SU1096094A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ АДАПТИВНЫМ ПНЕВМОГИДРАВЛИЧЕСКИМ РОБОТОМ | 2008 |
|
RU2463156C9 |
| УПРОЩЕННЫЙ АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2001 |
|
RU2208513C2 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| РАСПРЕДЕЛИТЕЛЬНЫЙ ДВУЗНАЧНЫЙ ТАНДЕМ ЗОЛОТНИКОВ С ЛОГИЧЕСКОЙ ФУНКЦИЕЙ "ТО..., ТО" | 2002 |
|
RU2251029C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ КОРПУСОВ СУДОВ | 1969 |
|
SU243424A1 |
| Клепальная установка | 1981 |
|
SU1016032A1 |
| Устройство для автоматической ориентации рабочего инструмента по краю материала | 1972 |
|
SU476869A1 |
| Гидрокопировальный суппорт к резьботокарному станку | 1979 |
|
SU872202A1 |