Изобретение относится к машиностроению, в частности к манипуляторам, нриме- няемым для выполнения технологических операций типа сверление отверстий в изделиях со сложной поверхностью.
Цель изобретения - повышение точности позиционирования путем увеличения жесткости исполнительного механизма в его ориентированном положении.
На чертеже показан манипулятор, общий вид.
Манипулятор содержит платформу 1, на которой установлен исполнительный механизм, состоящий из натяжного силового цилиндра 2, основного силового цилиндра 3,
шей системе управления оператор с помощью трехкоординатной ручки 7 управления перемещает исполнительный механизм в необходимую для обработки зону. При касании одного из датчиков 11 поверхности обра5 батываемого изделия включается следящая система, которая управляет поворотным устройством 9 и цилиндром 3 исполнительного механизма манипулятора.
После того, как силовая головка 8 мет относительно обрабатываемого изделия требуемое положение, оператор с пульта управления 10 включает цилиндр 2 выборки зазора в кинематической ueni привода, создавая натяг в шарнирах и выбирая зазоры в них, затем производится требуемая
Формула изобретения
20
двух поворотных цилиндров 4, связанных
между собой и с платформой 1 шарнира- 15 по технологии обработка изделия, ми 5. На конце штока 6 цилиндра 3 смонтированы трехкоординатная ручка управления 7 и силовая головка 8 с поворотным устройством 9, на корпусе цилиндра 3 установлен пульт 10 управления. Для управления перемещением силовой головки 8 служит трехкоординатная ручка 7, а слежение за поверхностью обеспечивается трехкоординатной копирующей системой, датчики 11 которой установлены на силовой головке 8.
Манипулятор при обработке отверстий в деталях со сложной поверхностью работает следующим образом.
Платформа 1 с манипулятором транспортируется в заданное место под обраМанипулятор по авт. св. № 984857, от- личаю1цийся тем, что, с целью повышения точности позиционирования путем увеличения жесткости исполнительного механизма, он снабжен дополнительным силовым цилиндром выборки зазора в кине.матической цепи 25 привода рабочей головки, шток и корпус которого шарнирно связаны соответственно с корпусом основного силового цилиндра и с платформой, причем центр последнего из указанных п арниров расположен в зоне, ограниченной линиями, соединяющими центры
батываемым изделием и фиксируется в этом 30 шарниров крепления к платформе основного положении. Далее при выключенной следя- и двух поворотных силовых цилиндров.
Составитель Ю. Вильчинский Техред И. ВересКорректор .Л. Обручар
Тираж 954Подписное
ВНИИПИ Государственного комитета ССХЛ по делам изобретений и открытий
113035, A VocKBa, Ж-35, Ра) шская наб., д. 4/5 Производственно-.полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
шей системе управления оператор с помощью трехкоординатной ручки 7 управления перемещает исполнительный механизм в необходимую для обработки зону. При касании одного из датчиков 11 поверхности обрабатываемого изделия включается следящая система, которая управляет поворотным устройством 9 и цилиндром 3 исполнительного механизма манипулятора.
После того, как силовая головка 8 займет относительно обрабатываемого изделия требуемое положение, оператор с пульта управления 10 включает цилиндр 2 выборки зазора в кинематической ueni привода, создавая натяг в шарнирах и выбирая зазоры в них, затем производится требуемая
по технологии обработка изделия,
Формула изобретения
гии обработка изделия
по технологии обработка изделия,
Манипулятор по авт. св. № 984857, от- личаю1цийся тем, что, с целью повышения точности позиционирования путем увеличения жесткости исполнительного механизма, он снабжен дополнительным силовым цилиндром выборки зазора в кине.матической цепи привода рабочей головки, шток и корпус которого шарнирно связаны соответственно с корпусом основного силового цилиндра и с платформой, причем центр последнего из указанных п арниров расположен в зоне, ограниченной линиями, соединяющими центры
шарниров крепления к платформе основного и двух поворотных силовых цилиндров.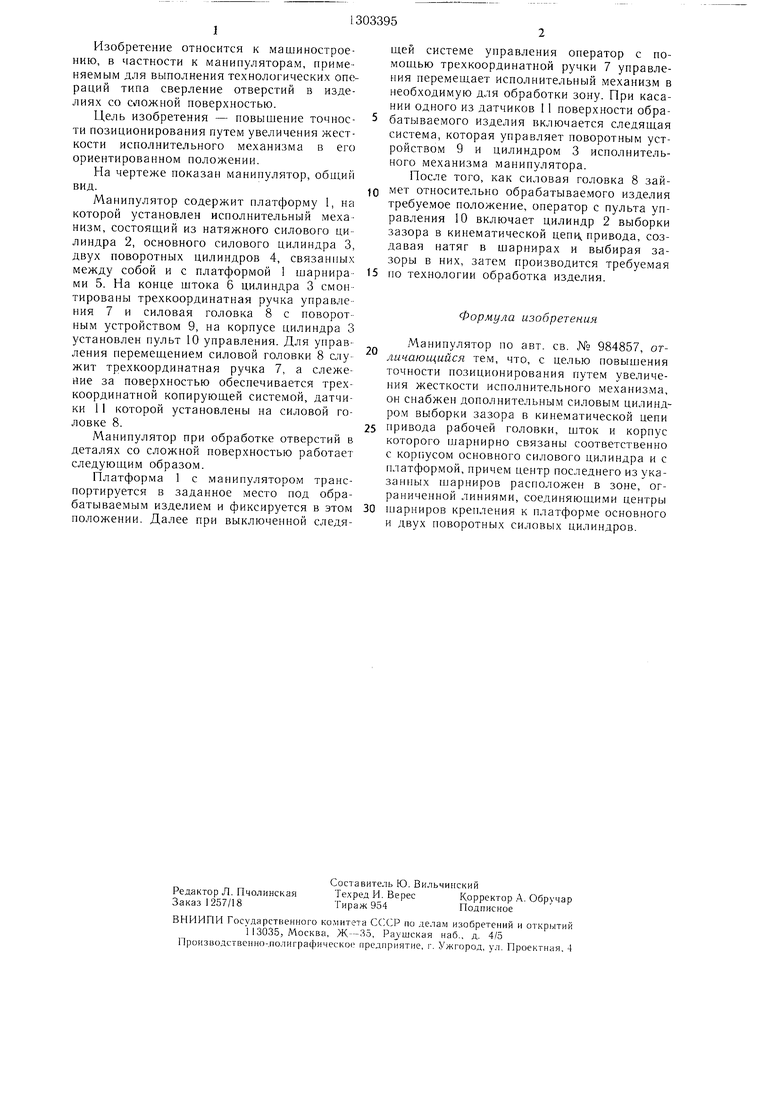
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU984857A1 |
| Манипулятор с ручным управлением | 1983 |
|
SU1096094A1 |
| Манипулятор | 1985 |
|
SU1255423A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВ ДЛЯ ХРАНЕНИЯ ИНФОРМАЦИИ (ВАРИАНТЫ) | 1996 |
|
RU2188464C2 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ | 2011 |
|
RU2501648C2 |
| ГОЛОНОМНЫЙ СВАРОЧНЫЙ ТРАКТОР | 2018 |
|
RU2698015C1 |
| ПОГРУЗО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU366103A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
Изобретение относится к области машиностроения, в частности к манипуляторам, применяемы.м для выполнения технологических операций типа сверления отверстий в изделиях со сложной новерхностью. Целью изобретения яв.:|яется повышение точности позиционирования за счет увеличения жесткости исно. шительного ме.ханизма в его ориентированном положении. Предварительная установка силовой головки 8 осу- Н1ествляется трсхкоординатной ручкой унрав- ления 7 с помощью силовых цилиндров 3 и 4. При касании одного из датчиков 11 поверхности обрабатываемого изделия включается следяпхая система, которая управляет поворотным устройством 9 и основным силовым цилиндром 3 исполнительного механизма. Затем включается дополнительный силовой цилиндр 2 выборки зазора в кинематической цепи привода рабочей головки, создавая натяг в Н1арпирах п выбирая в них зазоры. После этого производится требуемая по технологии обработка изде.чия. 1 ил. S оо о 00 ОО CD ел fsj
| Манипулятор | 1981 |
|
SU984857A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
