(54) МАНИПУЛЯТОР ДЛЯ МОНТАЖНО-СБОРОЧНЫХ
РАБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU529072A1 |
| Манипулятор | 1981 |
|
SU984857A1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ | 2011 |
|
RU2501648C2 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Манипулятор Ильина | 1983 |
|
SU1148777A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Манипулятор | 1976 |
|
SU653103A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
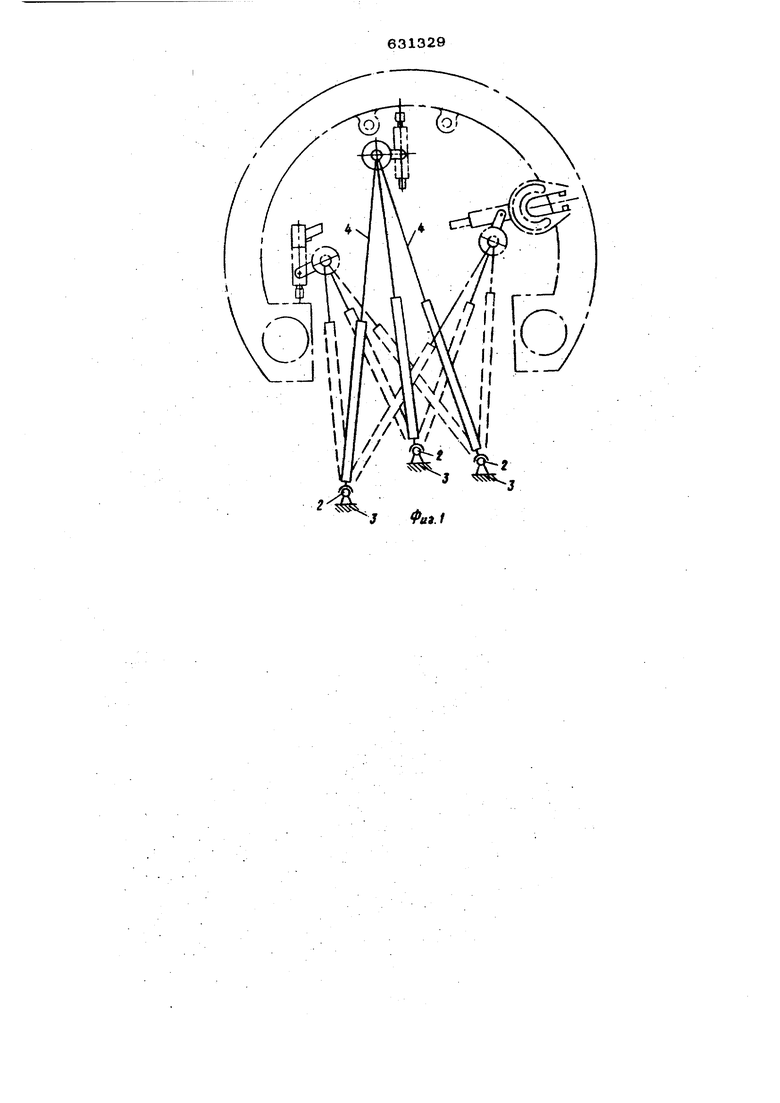

Изобретение относится к машинострое ийю, в частности, к манипуляторам и роботам со следящей системой, и может быть использовано как подъемно-транспортное устройство для перемещения в пространстве и удержания в заданном положении различных объектов, например, при механизации операций, выполняемых при монтажно-сборочных работах (сверле ние отверстий при сборке, клепка и точеч ная сварка, расточка и разделка отверстий, установка тяжелых деталей на конвейерных линиях и т. д.). Известны манипуляторы, содержащие испсшнительный механизм с приводом от силовых цилиндров, шарнирно связанных с основанием, и задающий механизм с ру кояткой управления lj. Недостатком известного манипулятора является низкая точность управления исполнительным механизмом и сложность конструкции. Предлагаемый манипулятор отличается от известного тем, что в нем исполнитель ный механизм выполнен в виде трехстерж невой стетвмы, каждый стержень последней содержит золотник, один конец которого шарнирно связан со штоком силового ц щиндра, а другой Taioite шарнирно - с рукояткой управлен1ш, размещённой в точке пересечения стержней, причем на звеньях стержней смонтированы элементы, предназначенные для креплен1ш в них рабочих 1шструментов. Этим повышается точность управления исполнительным механизмом и упрощение конструкции. На фиг. 1 показан описьгааемый манипулятор, различные положения исполнительного механизма в процессе работи с различными рабочими инструментами, общий вид,- на фиг. 2 - принципиальная кинематическая схема манипулятора. Ман1шулятор содержит исполнительный механизм с прьгводом от силовых цилиндров, Hanpiflvjep гидроцилиндров 1р связанных шарнирами 2 с основанием 3. Штоки 4 гиироаилиндров 1 имеют на конце вилки 5 и щарнирно соединены между собой дополнвтвпьвым звеном 6. Пря этом оси врашевия ввпок 5 пересекаются в одной обшей точке 7, которая является центром pytcoHTKH 8 упрввпенйя. На штоках 4 каж- дого гкароципиндра 1 установлены дроссельные следящие золотнякн 9, которые одним концом через шарнир Ю соединены с этим штоком, а другим - при помосои эвена 11 шарнирно соединены собой и с рукояткой управления 8 задающего механизма, так что оси шарниров пересекаются в точке 7. Звено 6 имеет элементы 12 для крепления рабочего инструмента в различту гх положениях. Каж дый гадроципиндр связан с дроссельным золотником 9 трубопроводом по схеме опедяшей системы. Средний пояс золотника 9 соединен с напорной магистралью 13 насоса 14, а крайние пояса золотника 9магистралыр 15 со сливным баком. Пространство между верхним и средним поясо золотника 9 соединено трубопроводом с верхней полостью гидрошшиыдра 1, а пространство между нижним и средним поясом золотника 9 трубопроводом - с нижней частью гидроцилиндра 1, На фиг, 2 показан, один из вариантов применения манипулятора, на котором установлен рабочий инструмент 16 для выш лнения сверпшгьных работ, Манипулятор работает следующим образом. Оператор одной рукой поддерживает за рукоятку рабочий инструмент 16, а другой рукой воздействует на рукоятку 8 управленвя для пёремешениа рабоче го инст- румента 1в в необходимое положение. При этом сипа воздействия оператора на рукоятку 8 управления проходит через точку 7 и раскладывается по направлению осей золотников, которые перемещаются пропор ционально сипам, соответствующим проекциям сипы воздействия оператора на эти оси. Например, при перемещении золотника 9 из нейтрального положения вверх по схеме на фиг. 2 нагнетательная магистраль 13 через трубопровод соединяется с Нижней полостью гидроципиндра 1, а верхняя полость гидроцилиндра 1 через другой трубопровод - со сливной магистралыо 15, Возникающее в нижней части гвдроцилвндра 1 избыточное давление воздейству ет на поршень и перюмещает его вверх,. пр этом перемещается вверх установленный на штоке 4 гкдроцйпиндра золотник 9, меньшая тем самым величину его смещеия относительно нейтрального положения, ызванного воздействием оператора. Когда сигнал обратной связи полностью компенсирует управляющий сигнал, золотик 9 займет нейтральное положение, а корость движения поршня станет равной улю. Рабочий инструмент 16 при этом займет в пространстве заданное положение. Соединение других золотников 9 с гидроцилиндрами 1 и работа их аналогична указанной. В зависимости от величины компонентов воздействующего усилия и их направления в работу включаемся один, два или все три золотника 9, которые задают различные перемещения штокам 4 гидроцялиндров 1. по скорости и по направлению. После того, как манипулятор займет заданное положение, оператор включает рабочий инструмент 16, который выполняет заданную технологическую операцию. Конструкция манипулятора позволяет с достаточной точностью копировать рабочим инструментом 16 движения руки оператора в пространстве обслуживаемой зоны по вектору перемещения и по скорости. Конструшхия манипулятора позволяет выполнить его, при необходимости, из двух гидроципиндров и двух золотников, если зона действия рабочей машины ограничена плоскостью. Формула изобретения Манипулятор для монтажно-сборочных работ, содержащий исполнительнь1й механизм с приводом от силовых цилиндров, шарнирно связанных с основанием, и задающий механизм с рукояткой управления, отл ичающ ийся тем; что, с целью повышения точности управления исполнительным механизмом и упрощения конструкции, исполнительный механизм выполнен в виде трехстержневой пространственной системы, каждый стержень которой содержит золотник, один конец которого шарнирно связан со штоком силового цилиндра, а другой также шарнирно - с рукояткой управления, размещенной в точке пересечения стержней, причем на звеньях стержней смонтированы элементы, предназначенные для крепления в них рабочих инструментов. Источники информации, принятые во внимание при экспертизе; 1. Патент США № 3150733, кл. 18О-8, 1964.
J Фи9.1
16
