1
Изобретение относится к средствам автоматизации технологических процессов Б горно-добывающей промьпи ленности и может быть использовано на открытых горных разработках для автоматического управления роторным экскаватором, и является дополнительным к основному авт.св. № 988987.
Целью изобретения, является повышение точности управления за счет исключения погрешности измерения сигнала обратной связи.
На фиг. 1 приведена блок-схема предлагаемого устройства на фиго 2 - блок компенсации с соответствующими СВЯЗЯМИо
Устройство содержит задатчик 1 производительности, датчик 2 производительности экскаватора, датчик
3нагрузки привода ротора, датчик
4скорости поворота ротора, датчик 5 скорости конвейера, преобразователь 6 синуса угла поворота ротора относительно забоя, датчик 7 угла по- ворота ротора относительно стрелы, да чик В угла наклона стрелы, блок 9 компенсации, один вход Которого связан с выходом датчика 7 угла поворота ротора, второй вход - с выходом датчика 8 угла наклона стрелы, а выход - со входом преобразователя 6 синуса угла поворота ротора, элемент 10 сглаживания сигнала нагрузки, основной вход которого соединен с выходом датчика 3 нагрузки привода ротора, управляющий вход - с выходом датчика 4 скорости поворот ротора, а выход связан со входом блока 11 умножения, выход которого соединен с одним из входов блока 12 умножения, второй вход которого связан с выходом преобразователя 6 угла поворота ротора, а выход - с первьм входом блока 13 вычитания, второй вход которого соединен с датчиком 3 нагрузки привода ротора,
а выход - с одним из входов элемента 14 сравнения и узел 15 коррекции, первый основной вход которого связан с задатчиком 1, второй основной вход - с датчиком 2 производительности, третий основной - с датчиком 3 нагрузки привода ротора, первьй управляющий вход-узла 15 коррекции соединен с датчиком 4 скорости поворота ротора, второй управляющий вход - с датчиком 5 ско212802
роста конвейера, первый выход узла коррекции подключен ко второму входу блока 11 умножения, второй выход - ко второму входу элемента 14 сравне5 ния, выход которого соединен со
входом регулятора 16 скорости привода поворота роторной стрелы.
Устройство работает следующем образом,
10 От датчика 3 нагрузки привода ротора сигнал поступает на входы узла 15 коррекции, элемента 10 сгла-: живания и блока 13 вычитания. На основные входы узла 15 коррекции
15 поступают также сигналы датчика 2 и задатчика производительности, а на управляющие - сигналы датчика 4 скорости ротора и датчика 5 скорости конвейера В узле 15 коррекции
20 на скользящем интервале, равном
периоду оборота ротора, определяются средние интегральные значения нагрузки привода ротора и производительности экскаватора, вычисляет25 ся величина удельной энергоемкости процесса копания, определяемая как отношение сигнала интегральной нагрузки привода ротора, задержанного на время транспортного запазды30 вания в канале измерения производительности, к сигналу интегральной производительности экскаватора. Сигнал удельной энергоемкости поступает на один из входов блока 11
, умножения, на второй вход которого поступает сглаженный сигнал нагруз- ки привода ротора с выхода блока 10. Сигнал скорректированного задания производительности, полученный в
4Q узле 15 коррекции в результате умножения сигнала задатчика производительности на величину удельной энергоемкости процесса копания, поступает на вход элемента 14 сравнения.
45
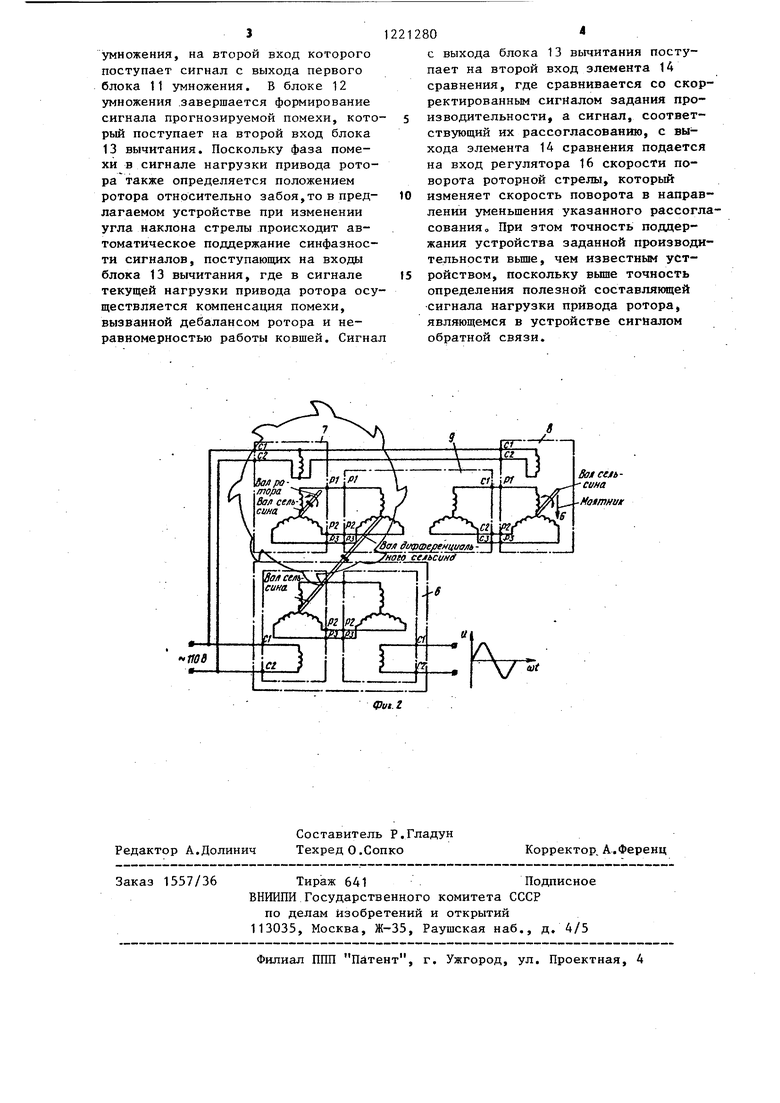
В блоке 9 компенсации, на один вход которого поступают угловые перемещения ротора относительно стрелы, а на второй вход - угловые
50 перемещения стрелы в вертикальной плоскости. Происходит алгебраическое сложение углов перемещений, в результате чего на вход преобразователя 6 синуса угла поступают угло55 вые перемещения ротора относительно забоя. Сигнал с выхода преобразователя 6 синуса угла поступает , на один из входов второго блока 12
умножения, на второй вход которого поступает сигнал с выхода первого блока 11 умножения, В блоке 12 умножения .завершается формирование сигнала прогнозируемой помехи, который Поступает на второй вход блока 13 вычитания. Поскольку фаза помехи в сигнале нагрузки привода ротора также определяется положением ротора относительно забоя,то в предлагаемом устройстве при изменении угла наклона стрелы происходит автоматическое поддержание синфазнос- ти сигналов, поступающих на входы блока 13 вычитания, где в сигнале текущей нагрузки привода ротора осуществляется компенсация помехи, вызванной дебалансом ротора и неравномерностью работы ковшей. Сигнал
с выхода блока 13 вычитания поступает на второй вход элемента 14 сравнения, где сравнивается со скорректированным сигналом задания производительности, а сигнал, соответствующий их рассогласованию, с выхода элемента 14 сравнения подается на вход регулятора 16 скорости поворота роторной стрелы, который
изменяет скорость поворота в направлении уменьшения указанного рассогласования. При этом точность поддержания устройства заданной производительности выше, чем известным уСтройством, поскольку выше точность определения полезной составлякяцей сигнала нагрузки привода ротора, являющемся в устройстве сигналом обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Устройство автоматического управления роторным экскаватором | 1982 |
|
SU1097757A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |

то
Зол сель- -cvMa
-MoimHug
tat
Редактор А.Долинич
Составитель Р.Гладун Техред О.Сопко
Заказ 1557/36
Тираж 641Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
Корректор. А.Ференц
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Объект управления | |||
