1
(21)4419908/31-03
(22)22.03.88
(46) 30.05.90. Бюл. № 20
(71)Криворожский горнорудный институт и Ново-Краматорский машиностроительный завод
(72)Е.А.Ильин, В.М.Назаренко, Р.Г.Солохненко и В.П.Шолтыш
(53)621.879.48 (088.8)
(56)Авторское свидетельство СССР № 968168, кл. Е 02 F 3/26, 1980.
Авторское свидетельство СССР 1157168, кл. Е 02 F 3/26, 1983.
(54)УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ
(57)Изобретение относится к горной промышленности и может быть использовано для управления роторным экскаватором. Цель изобретения - повышение производительности экскаватора при увеличении вязкости материала путем стабилизации нагрузки роторного колеса (РК). Устройство состоит
из каналов управления приводом 1 ротора экскаватора и приводом поворота стрелы экскаватора. Канал управления приводом 1 ротора экскаватора состоит из блока (БУ) 2 управления приводом РК, датчика 3 скорости РК, подключенного к входу БУ 2, к второму входу которого подключен первый сумматор 4. К сумматору 4 подключены задатчик 5 скорости вращения РК и управляемый ключ 6. К первому входу ключа 6 подключен датчик 7 разгрузки ковшей, а к второму - экстремальный регулятор (ЭР) 8. На вход ЭР 8 включен датчик 9 производительности. Канал управления приводом поворота стрелы экскаватора состоит из сумматора 11, задатчика 13 скорости поворота стрелы, подключенного к БУ 14 поворотом стрелы. При изменении физико-химических свойств разрабатываемого грунта происходит снижение производительности, что фиксируется датчиком 9, сигнал с которого поступает на вход ЭР 8. При налипании материала на ковш сигнал с датчика 7 открывает ключ 6 и через сумматор 4 сигнал поступает в БУ 2, что приводит к снижению скорости ротора. При этом увеличится ширина захвата и сигнал датчика 10 нагрузки совместно с сигналом от ЭР 8 уменьшит скорость поворота экскаватора. 1 ил.
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом роторного колеса экскаватора | 1980 |
|
SU968198A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для управления приво-дОМ пОВОРОТА КОВшА эКСКАВАТОРА | 1979 |
|
SU810913A1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
| Устройство автоматического управления роторным экскаватором | 1982 |
|
SU1097757A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
Изобретение относится к горной промышленности и может быть использовано для управления роторным экскаватором. Цель изобретения - повышение производительности экскаватора при увеличении вязкости материала путем стабилизации нагрузки роторного колеса (РК). Устройство состоит из каналов управления приводом 1 ротора экскаватора и приводом поворота стрелы экскаватора. Канал управления приводом 1 ротора экскаватора состоит из блока (БУ) 2 управления приводом РК, датчика 3 скорости РК, подключенного к входу БУ 2, к второму входу которого подключен первый сумматор 4. К сумматору 4 подключен задатчик 5 скорости вращения РК и управляемый ключ 6. К первому входу ключа 6 подключен датчик 7 разгрузки ковшей, а к второму - экстремальный регулятор (ЭР) 8. На вход ЭР 8 включен датчик 9 производительности. Канал управления приводом поворота стрелы экскаватора состоит из сумматора 11, задатчика 13 скорости поворота стрелы, подключенного к БУ 14 поворотом стрелы. При изменении физико-химических свойств разрабатываемого грунта происходит снижение производительности, что фиксируется датчиком 9, сигнал с которого поступает на вход ЭР 8. При налипании материала на ковш сигнал с датчика 7 открывает ключ 6 и через сумматор 4 сигнал поступает в БУ 2, что приводит к снижению скорости ротора. При этом увеличится ширина захвата и сигнал датчика 10 нагрузки совместно с сигналом от ЭР 8 уменьшит скорость поворота экскаватора. 1 ил.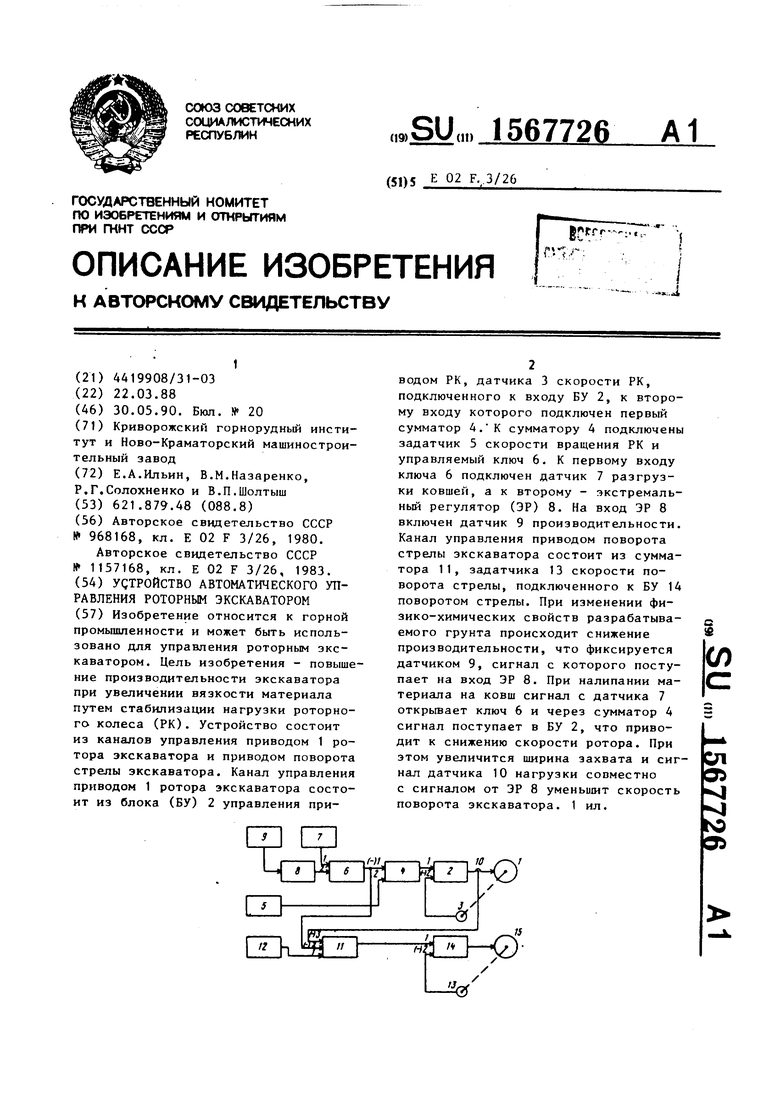
Изобретение относится к средствам автоматизации производственных процессов на открытых горных работах и может быть использовано для управления роторным экскаватором.
Целью изобретения является повышение производительности экскаватора при увеличении вязкости материала путем стабилизации нагрузки роторного колеса.
На чертеже приведена структурная блок-схема устройства для стабилизации нагрузки роторного колеса экскаватора .
Привод 1 ротора экскаватора подсоединен к блоку 2 управления приводом роторного колеса, на вход которому подается сигнал с датчика 3 скорости роторного колеса и первого сум матора 4, вход которого соединен с вькодом задатчика 5 скорости вращения роторного колеса и управляемого ключа 6, соединенного с выходом датчика 7 разгрузки ковшей и экстремального регулятора 8, соединенного с выходом датчика 9 производительности экскаватора, датчик 10 нагрузки роторного колеса подключен ко входу второго сумматора 11 совместно с задатчиком 12 скорости поворота стрелы, выход датчика 13 скорости поворота стрелы поступает на вход блока 14 управления приводом 15 поворота стрелы экскаватора.
Устройство работает следующим образом.
Скорость вращения роторного колеса, соответствующая максимальной производительности экскаватора, определяется задатчиком 5, сигнал которого совместно с сигналом выхода управляемого ключа 6 через первый сумматор 4 поступает на вход блока 2 управления приводом роторного колеса. При этом сигнал, пропорциональны нагрузке двигателя ротора, совместно с сигналом задатчика 12 скорости поворота стрелы через второй сумматор 11 и блок 14 управления приводом обеспечивают такую скорость поворота при которой ширина захвата роторного колеса обеспечит максимальную производительность .
При нормальной разгрузке ковшей ротора с датчика 7 разгрузки сигнал поступать не будет, что приводит к тому, что управляемый ключ 6 будет закрыт и сигнал с выхода экстремаль
5
5
ного регулятора 8 не будет поступать на вход первого сумматора 4. Это соответствует максимальной скорости вращения роторного колеса, которая определяется только сигналом задатчика. скорости.
При изменении физико-механических свойств разрабатываемой горной массы, например, при увеличении влажности уменьшается ее текучесть и происходит налипание материала на стенки ковшей роторного колеса, не полная их разгрузка. Это приводит к снижению производительности экскаватора или заданной скорости роторного колеса, что фиксируется датчиком 9 производительности, сигнал от которого поступает на вход экстремального регулятора 8. Налипший и не разгрузившийся из ковшей материал при заданной скорости выпадает из них за местом разгрузки и воздействует на эадатчик 7 разгрузки ковшей. Сигнал с этого датчика открывает управляемый ключ 6 и экстремальный регулятор 8 начинает воздействовать на первый сумматор 4 так, чтобы уменьшить результирующий сиг- 0 нал, поступающий на блок 2, управления привода роторного колеса.
При этом снижается скорость вращения ротора экскаватора при неизменившейся скорости поворота стрелы ротора. Это приводит к возрастанию ширины захвата роторным колесом и перегрузке приводных двигателей ротора, что вызывает увеличение тока приводных двигателей. Сигнал, поступающий с датчика 10 нагрузки во второй сумматор 11, совместно с CHI- налом от экстремального регулятора 8 уменьшает скорость поворота стрелы до тех пор, пока ширина захвата, следовательно, нагрузка на приводные двигатели ротора не приведет в соответствие с заданной загрузкой ковшей экскаватора. Так будет выполнена стабилизация ширины захвата ротором, будет предотвращен стопорный режим приводных двигателей рабочего органа экскаватора.
Если физико-механические свойства разрабатываемой горной массы вновь станут такими, что их текучесть обеспечит нормальную разгрузку ковшей, то датчик 7 разгрузки не будет выдавать сигнала и управляемый ключ 6 вновь будет закрыт. На первый сум5
0
5
0
5
3 1
матор 4 будет поступать сигнал только с задатчика 5 скорости вращения ротора. Следовательно, на входе блока 2 управления приводом роторного колеса возрастает сигнал и скорость вращения роторного колеса увеличивается до расчетного значения. При этом уменьшится ширина захвата ротор ным колесом, снизится нагрузка приводных двигателей ротора и сигнал от датчика 10 нагрузки упадет до номинального значения. Это вызовет снижение сигнала на входе второго сумматора 11, поступающего с выхода датчика 10. Так как управляющий ключ 6 закрыт, то на входе второго сумматора 11 сигнал будет определяться только величиной сигнала на выходе блока 12 задания скорости поворота стрелы. Поэтому скорость поворота возрастает, обеспечивая стабилизацию ширины захвата роторным колесом. Формула изобретения
Устройство автоматического управ - ления роторным экскаватором, содержащее датчик производительности, датчик скорости поворота роторной стрелы, блок управления приводом поворота стрелы и блок управления приводом роторного колеса экскаватора, выход которого подключен к датчику нагрузки привода ротора, отличающееся тем, что, с целью повы67726
шения производительности при увеличении вязкости материала путем стабилизации нагрузки роторного колеса, оно снабжено двумя сумматорами, управляемым ключом, экстремальным регулятором, датчиком скорости роторного колеса, эадатчиком скорости вращения роторного колеса, задатJQ чиком скорости поворота стрелы и датчиком разгрузки ковшей, выход которого подключен к первому входу управляемого ключа, к второму входу которого подключен выход экстремального
15 регулятора, к нходу которого подключен датчик производительности, а выход управляемого ключа подключен к первым входам первого и второго сумматоров, к второму входу второго
20 сумматора подключен задатчик скорости вращения роторного колеса, выход первого сумматора подключен к первому входу блока управления приводом роторного колеса, к второму входу
25 которого подключен датчик скорости роторного колеса, выход датчика нагрузки привода роторного колеса подключен к второму входу второго сумматора, к третьему входу которого
30 подключен задатчик скорости поворота стрелы, а выход второго сумматора подключен к первому входу блока управления приводом попорота стре35
лы, к второму входу которого подключен датчик скорости поворота стрелы.
