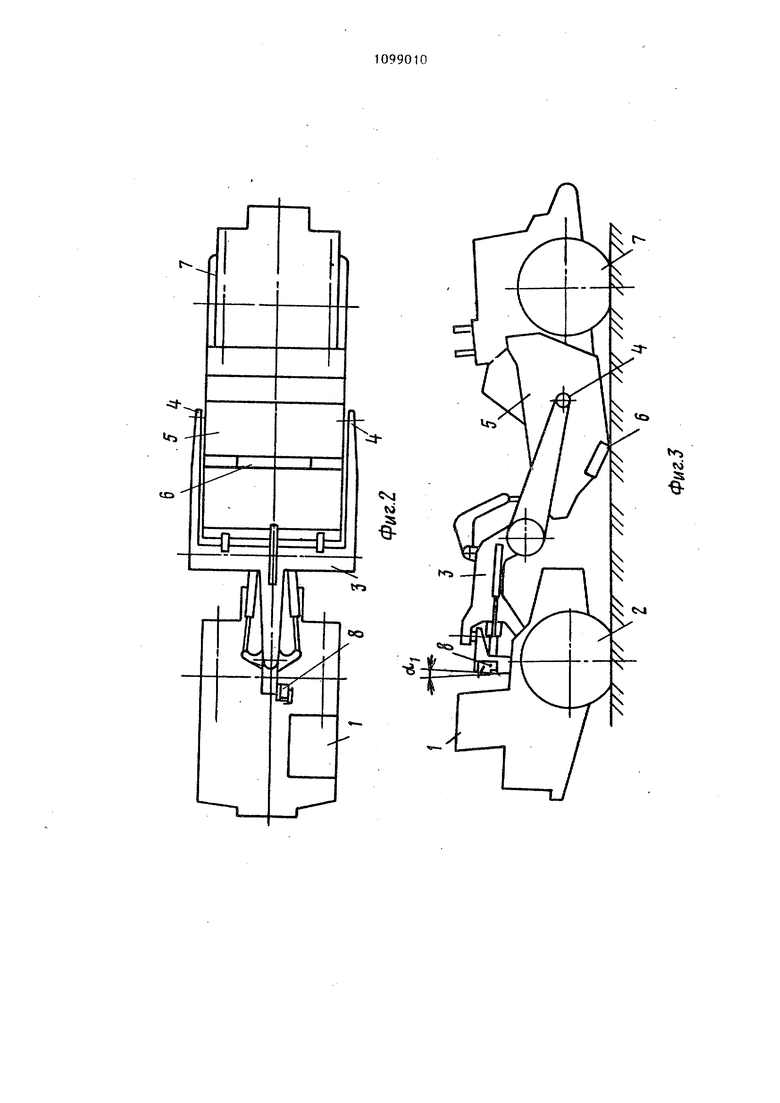
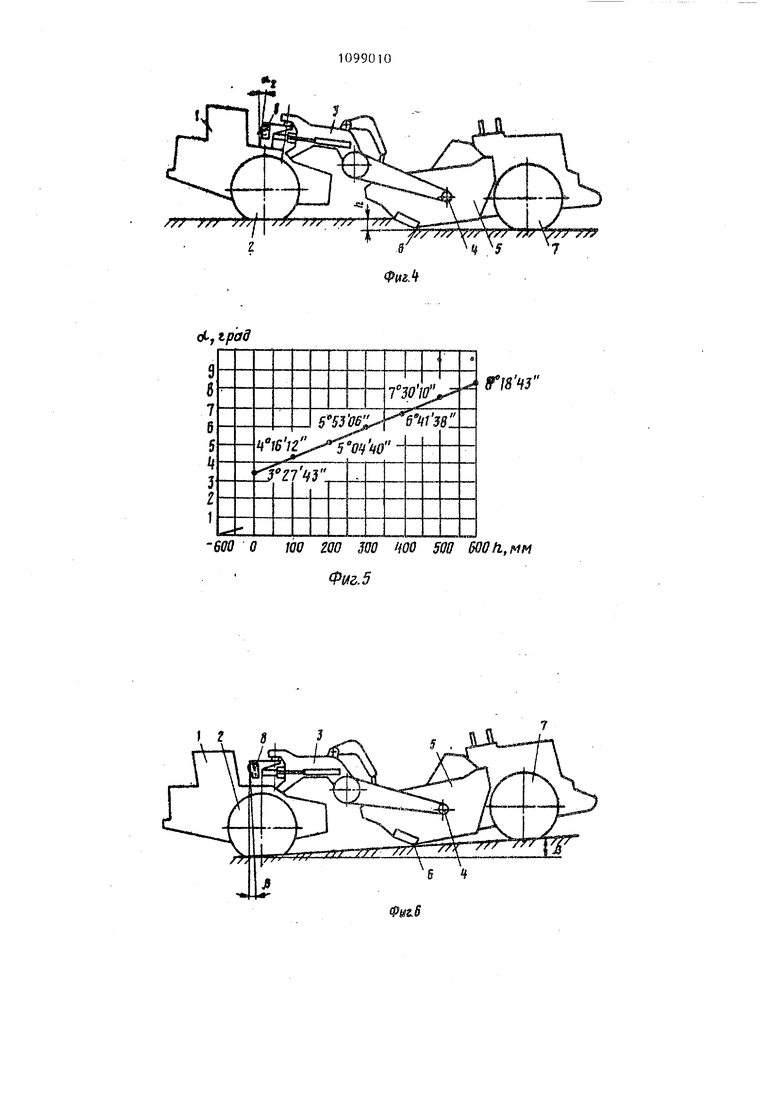
109 Изобретение относится к землеройно-т анспортной технике, в частности к скреперам с датчиками положения ков ша, постоянно информирующими оператора о толщине вырезаемой стружки. Известен скрепер, в котором датчиком положения ковша является дополнительное колесо с центробежньм регулятором и автоматическим переключателем, реагирующим на изменение скороети движения скрепера и подающим сигналы автоматическому гидрораспределителю управления гидроцилиндром ковша. Режим работы автоматическому переключателю передается с помощью находящегося в кабине ручного переключателя что позволяет оператору включать автоматическое регулирование при внедрении ковша на заданную глубину 1 . Недостатками устройства являются его сложность и.отсутствие у оператора постоянной информации о, толщине стружки, в связи с чем автоматика может, быть включена в неподходящий момент, что приводит к недобору грунта в ковш, Наиболее близким по технической сущности к изобретению является скрепер, включающий базовую машину, тяговую paNry, ковш и датчик его положе.ния 2 . Недостатками этого устройства являются ограниченно.сть его использования прицепньми и полуприцепными скреперами, имеющими соседние кинема С; тические звенья с относительной подвижностью и неподвижностью при заглуб лении ковша, сложность конструкции и ее обслуживания, влияние на датчик по ложения ковша ускорений скрепера., Целью изобретения является поБЬ шение производительности за счет обеспе чения оптимального заглубления ковша Указанная цель достигается тек., что в скрепере, включающем базовую машину, тяговую раму, ковш и датчик его положения, последний выполнен из жестко закрепленного на тяговой раме корпуса с боковыми стенками, из шарнирно установленных внутри корпус на его боковых стенках противовеса с тормозным узлом и маховика и из шарнирно установленных на нар огшых сторонах боковых стенок корпуса стрелки шкалы, при этом маховик связан посредством регулируемой тяги и амортизатора соответственно со стрелкой и корпусом, а шкала и противовес жестко закреплены на одной оси. На фиг. 1 изображен скрепер на горизонтальной поверхности; на фиг. 2 то же, вид. сверху; на фиг. 3 - то же5 в момент касания ножом грунта; на фиг, 4 - то же5 при максимальной стружке; на фиг. 5 - график зависимости угла наклона тяговой рамы скрепера от толщины стружки; на фиг. 6 положение скрепера на наклонной поверхности грунта для регулирования устройства; на фиг. 7 - вид на устройство со стороны стрелки-указателя; .на фиг. 8 - то же, со стороны шкалы; на фиг. 9 - поперечное сечение устройства по осям стрелки и шкалы; на фиг. 10 - механизм шкалы, вид изнутри устройства; на фиг. 11 - механизг-5 стрелки, вид изнутри устройства, Кроме того обозначены угол с наклона тяговой рамы в вертикальной плоскости от исходного (транспортного) положения 5 угол d, наклона рамы в момент касания ножом грунта, максимальный угол обт , толщина h стружки. 3 Ь„ рычагов крепления тяги плечи Ь соотЕ етстзенно к грузу и стрелке, угол 8 г.аклона поверхности грунта для случая .копания под уклон, равный углу наклона тяговой рамы. На фиг, 7, 10 и 11 сплошными стрелками пг-.казано направление поворота элементов устройства при .згхглублении ковша; пунктирными стрелками - направление поворота элементов устройства при нахолвдекии скрепера на уклоне и регулировке нуля с помощью поворота шкалы. Скрепер содержит базовую машину 1 с колесами 2, тяговую раму 3 с гяарниром 4 ее сочленение с ковшом 5, имеющим нож 6 и закрепленным аа оси задних колес 7, Тяговая рама 3 ша.рнирно соединена с рамой одноосного тягача 1 и несет датчик положения ковша 8. Устройство дл.ч управления ковшом скрепера может быть монтировано в любом доступном для наблюдения месте тяговой рамы, а для самоход15ого скрепера - и одноосного тягача и кабины, так как последние в смысле поворота в вертикальной плоскости являются егщным кинематическим элементом. Датчик положения ковгяа скрепера включав. корпус 9 с боковыми стенками., установленный на последних посредством оси, маховик 10 с рычагом 11, имеющим плечо 2 относительно оси 9 и соединенным на плече В тягой 12 с муфтой 13 регулировки ее длины со стрелкой-указателем 1А, установленно шарнирно на оси 15 над шкалой 16, со диненной с маховиком шарниром 17 амортизатора 18 с регулировочньт вин том 19. Шкала 16 шарнирно монтирован на оси 20, установленной соосно оси 15 стрелки-указателя 14, уравновешена противовесом 21 и удерживается в необходимом положении тормозным узлом, состоящим из кулачка 22, пружины 23, тросика 24 управления и тормозной накладки 25. На корпусе 9 выполнен паз 26 для перемещения регули ровочного винта 19 и закрытое поворотной крышкой 27 окно для доступа к муфте 13 регулировки длины тяги 12 Оба механизма (стрелки 14 и шкалы 16) имеют независимую регулировку и размещены в отдельных частях корпуса. Устройство работает следующим образом. Транспортное положение тяговой ра мы 3 является исходным положением, при котором маховик 10 через рычаг 1 и тягу 12 удерживает стрелку-указатель 14 в верхнем положении шкалы 16 При опускании ковша 5 опускается связанный с ним шарнир 4 тяговой рамы 3, благодаря чему последняя поворачивается по часовой стрелке относительно оси передних колес 2. Но ма ховик 10, подвешенный к своей оси 9, остается относительно нее в неизменном положении. С поворотом тягово рамы 3 связан поворот в пространстве в том же направлении и на ту же угловую величину корпуса 9, благодаря чему в противоположном направлении на чикается поворот стрелки-указателя 14 увеличенный соответственно соотношению плеч /t. При опускании ножа 6 ::а горизонтальный уровень опорной поверхности колес 2 и 7 (фиг. 3) стрелка-указатель 14 должна остановиться против нуля шкалы 16. Возможное несоответствие легКо компенсиру1ется соответствующим поворотом муфты 13, отжимаемой и зажимаемой контргайками. При максимальном заглублении в установившемся режиме копания (нож 6 и задние колеса 7 находятся на одном горизонтальном уровне) .стрелка-указатель 14 устанавливается напротив максимальной отметки шкалы 16. Таким образом, поворот тяговой рамы 3 является тем силовым импульсом. 1 04 который приводит в действие устройство. Зависимость угла поворота тяговой рамы Зр(. от величины заглубления ковша 5 h является линейной (фиг. 5). Выявление .по графику рабочего диапазона углов поворота тяговой рамы 3 позволяет, рассматривая противовес 10 в качестве датчика положения ковша 5, сделать кинематический расчет необходимой длины плеч t,, J (фиг. 11). Разбивка делений шкалы 16 (фиг.8), т.е. выбор кинематической длины стрелки-указателя 14, производится с учетом возможности отчетливого наблюдения за показаниями устройства из кабины одноосного тягача 1. Для удобства оператора шкала 16 имеет разбивку сверху-вниз, т.е. заглублению ковша 6 соответствует опускание стрелкиуказателя 14. Неизбежные рывки и притормаживания скрепера в процессе копания, вызванные сколами стружки, взаимодействием с толкачом, неравномерной прочностью разрабатываемого грунта и другими причинами, вызывающими раскачивание груза и могущими внести искажения в показания устройства, компенсируются внутренним- трением жидкости в отверстиях поршня амортизатора 18, благодаря чему ускорения скрепера стрелке-указателю 14 не передаются. Необходимо только следить за тем, чтобы установка регулировочного болта 19 в пазу 26 обеспечивала беспрепятственный поворот маховика 10 во всем диапазоне углов о1 . Система отслеживает положение средней части ножа 6, поэтому,поперечные качания ковша 5 или одноосного тягача 1, вызванные проседанием колес 2 и 7 или преодолеванием ими препятствий, либо не передаются устройству (если положение середины осей колес 2 и 7 по вертикали не изменилось), либо отражаются как половина соответствующего перемещения одного из колес 2 и 7. В рабочем диапазоне шкалы 16 стрелка-указатель 14 непрерывно меняет свое положение (дрожит) из-за различия траекторий движения всех четырех колес 2 и 7, но значительная база машины приводит к тому, что эти колебания невелики и при наблюдении за стрелкой из кабины одноосного тягача 1 практически незаметны. При поперечных наклонах ковша 5 наклоняется и тяговая рама 3, поэтому
j109
подвес маховика 10 должет быть жестким и не допускать касания кахозико ; 10 корпуса 17, так как это внесет искажения в показания устройства
, В практике работы скреперксть; часто используют копание под уклон, что позволяет к тяговому усилк-о ctpeпера добавить составляющую его веса,, KanpaBJieHFLyro вдоль опорной поверхности, Б связи с зависимостью устройства от уклона местности при долговременной работе с производством копания под уклон устройство нео(57{одимо отрегулировать на нуль при прохождении машины на этом же уклоне, /для это го, опустив ковш до положения касания нонсом 6 поверхности грунта при размещении одноосного тягача I ниже остальной части: скрепера (фиг. 6), за тросик 24 вьггягивают кулачок 22 из-под противовеса 21., что приводит к .опусканию тормозной накладки 25 и расторма5киванию противовеса 2 К 2то дает возможность шкале 16 под воздействием противовеса 21 развернуться относительно корпуса 17 с учетом фактического уклона местности. После этого шкалу 16 необходт.имо вновь затормозить, что достигается отпуска-нием тросика 24, благодаря чему нружина 23 подтягивает кулачок 22 под противовес 21 и поджимает последний тормозной накладкой 25. Указанная операция приводит к подъему шкаль 16 и установке ее против стрелки-указателя 14, регулировку которой на нуль шкалы 16 следует пpoизiзecти5 как было указано ранее,.
По окончании работы под ухлон устройство необходимо вновь отрерулировать для работы на горизонтальной г:оверхкостн (фиг. 3), произведя соответствуюЕОТо регулировку и механизм;;. пгкалы 16, и механизма стрелки U:-,,
При кратковременной работе под уклон механизм шкалы 16 можно оставлят в исходном положении, запомнив, что в этом случае, как и в неустановившемся режиме при заглублении ковша 5, устройство будет показывать меньшую толасииу стрелки, чем фактически раз рабатывается ножом 6. В неустановивпюмся режиме при вьп лублении ковша устройство показывает большую толщину стружки, чем фактически разрабатывает нож 6, Величина искажения показан.ий при неустановившихся режимах заглубления и выглубления ковшаj занимающих небольшую часть времени копания, не превышает одного деления шкалы 1 6,.
Таким образом, выполнение устройст зом для управления ковшом предлагаемого скрепера обеспечивает наттежное функционирование при любых ситуациях, Бозникаю;цих при работе скрепера, обладая универсальной возможностью быть йспох ьзованным на всех типа этих маслин - самоходных, прицепных и полуприцепньгх,
Устройство управтшния ковшом авто-юмно, не зависит от конструктивного решения узлов скрепера и может быт установлено в любой его части,поворачивающейся вместе с тяговой рамой. Последнее позволяет для самоходных скреперов монтировать устройство непосредстненЕю в кабине, что значительно облегчает условия работы оператора В предлагаемом скрепере облегчено обслуживание устройства, снижено влияние ia него ускорений, Возникающих н процессе копания. Все зто обеспечивает повышение произво.дительности машины и получение годового зкопомического эффекта в сумме более 500 руб. иа один скрепер с емкостью ковша 25 м
l M
| название | год | авторы | номер документа |
|---|---|---|---|
| Скрепер | 1982 |
|
SU1021726A1 |
| СКРЕПЕР | 2001 |
|
RU2188279C1 |
| Способ управления ковшом скрепера и устройство для его осуществления | 1987 |
|
SU1495417A1 |
| СКРЕПЕР | 2004 |
|
RU2283923C2 |
| СКРЕПЕР | 2003 |
|
RU2247194C1 |
| СПОСОБ КОПАНИЯ ГРУНТОВ СКРЕПЕРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2039161C1 |
| СКРЕПЕРНЫЙ АГРЕГАТ | 2005 |
|
RU2295610C2 |
| СКРЕПЕР | 2011 |
|
RU2460850C1 |
| Скрепер | 1978 |
|
SU891848A1 |
| Скрепер | 1989 |
|
SU1700152A1 |


СКРЕПЕР, включающий базовую машину, тяговую раму, ковш и датчик его положения, отличающийс я тем, что, с целью повышения производительности за счет обеспечения оптимального заглубления ковша, датчик положения ковша вьтолнен из жестка закрепленного на тяговой раме корпуса с боковыми стенками, из шарнирно установленных внутри корпуса на его боковых стенках противовеса с тормозным узлом И маховика из шарнирно установленных на наружных сторона;х боковых стенок корпуса стрелки И шкалы, при этом маховик связан посредством регулируемой тяги и амортизатора соответственно со стрелкой И корпусом, а шкала и противовес жестко закреплены на одной оси.
ot, град
-600 о 100 т т w 500 шл,мм Фиг,. 5
f S
IBH3
16ФигЛ
10
Фиг. 8
П
Щ }9Ю
Фиг. 9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент CIUA № 3394474, кл | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке 3388068/24-03, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
