ль
fff 3
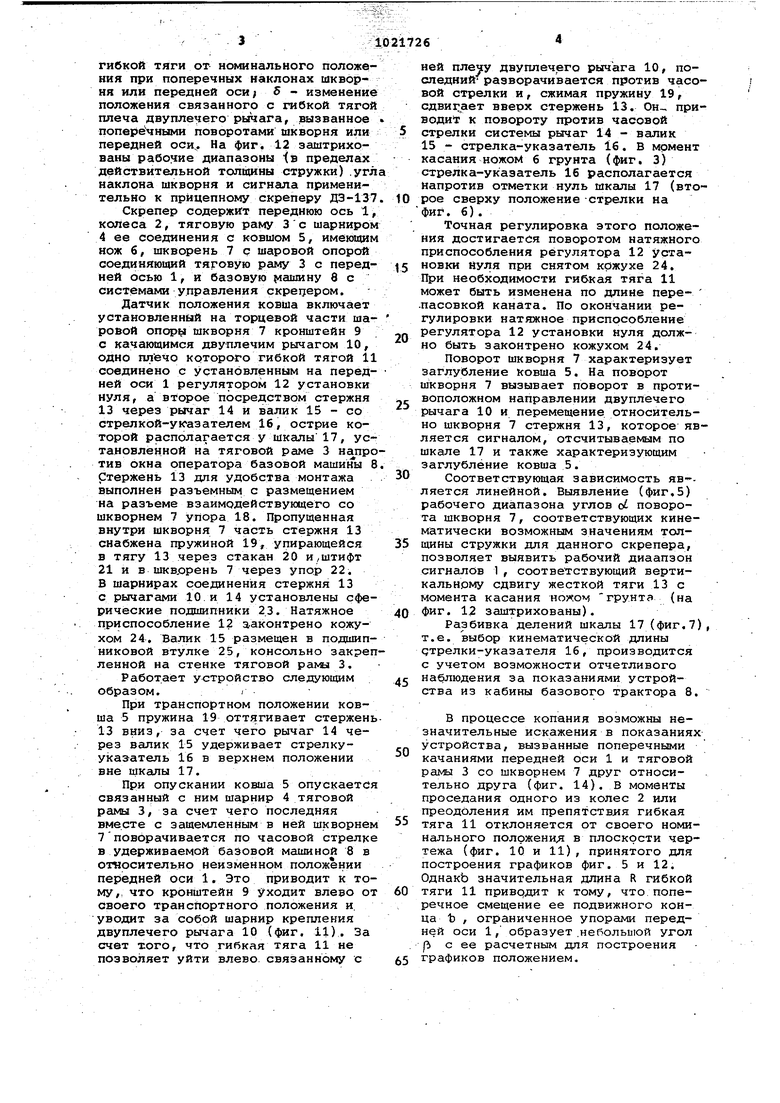
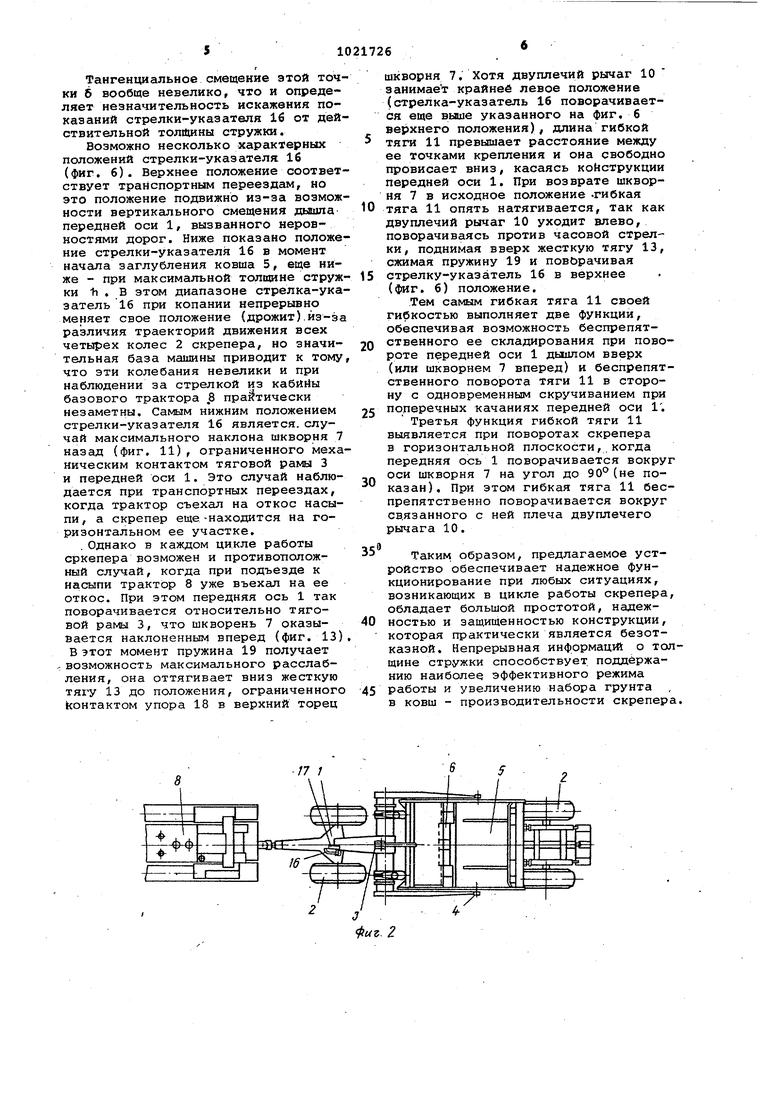
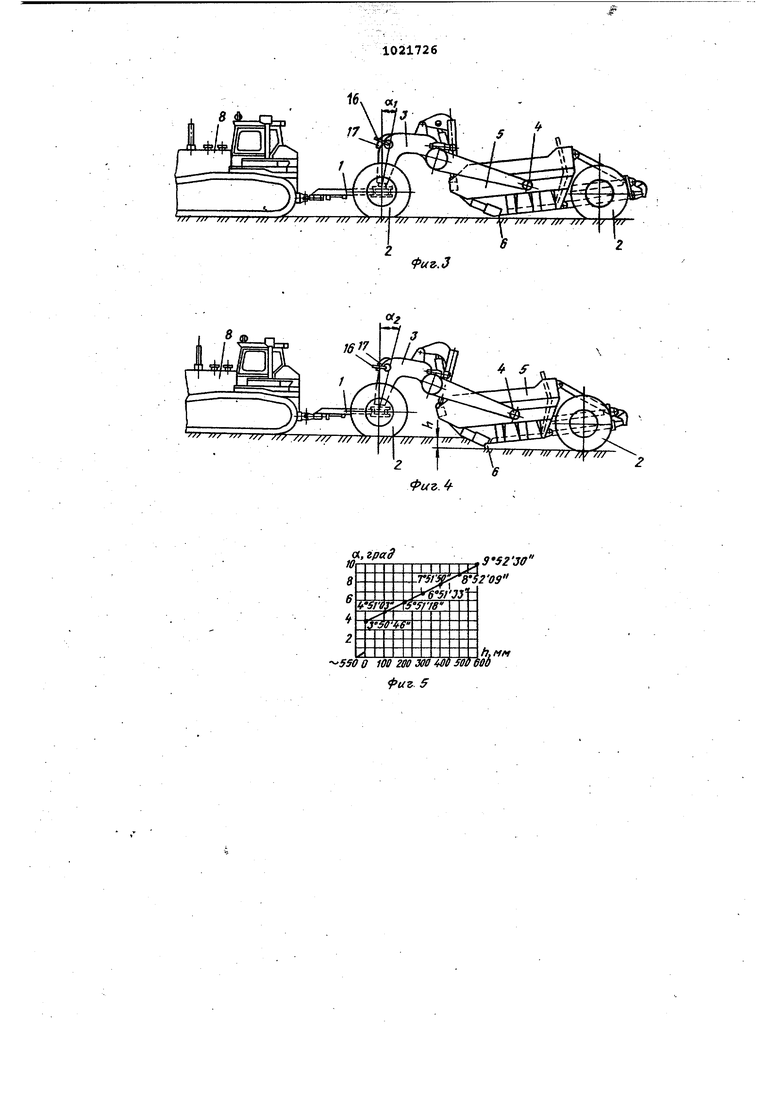
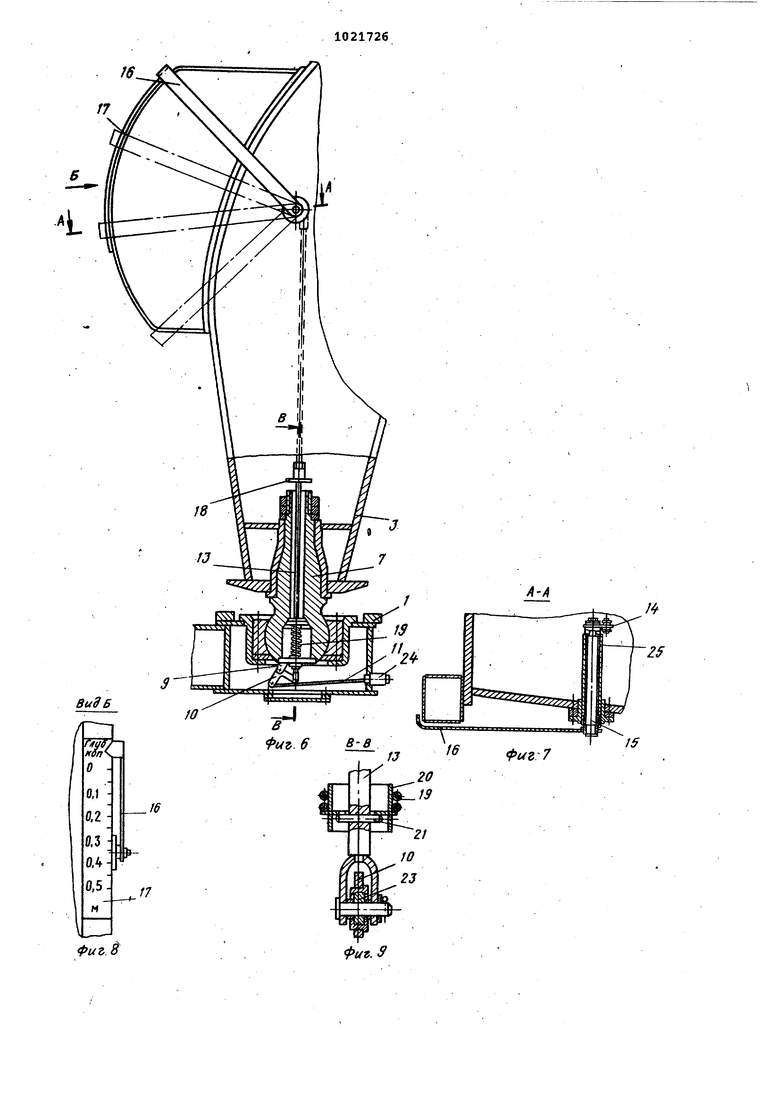
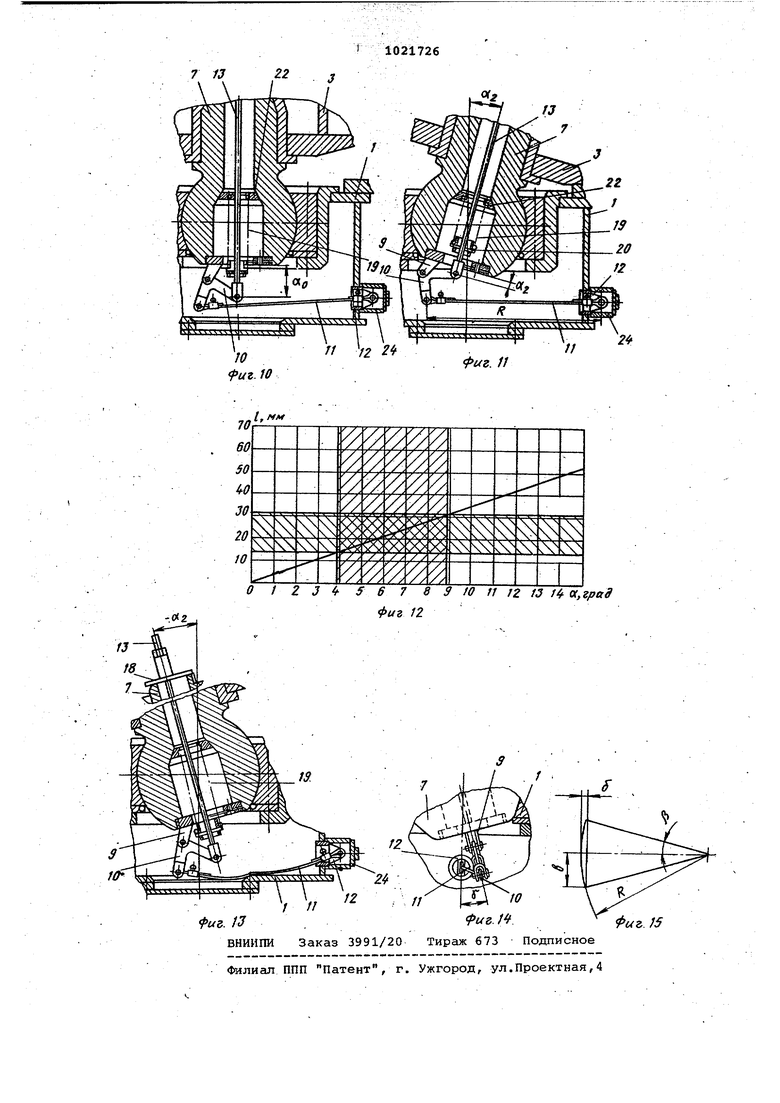
б Изобретение отиюс тея к эемлеройно-транспортной технике, 8 частности к скреперам прицепного или полуприцепного типа с датчика 4и положения ковша. Известен скрепер с датчиком положения ковша, у которого датчиком является дополнительное колесо с центробежным регулятором и автоматически переключателем, регулирунвдим на изме нение скорости движения скрепера и подающим сигналы автоматическому гидрораспределителю управления гидро цилиндром ковша. Режимработы автома тическому переключателю назначается с помощью находящегося в кабине ручного переключателя. Это позволяет оператору включать автоматическое регулирование при внедрении ковша на заданную глубину 1. Нвдостаткс1ми этого устройства являются его сложность и отсутствие у оператора постоянной информации о толщине стружки, в связи с чеМавтоматика может быть включена в неподходящий момент, что приводит к недобору грунта в ковш. Наиболее близким к предлагаемому является скрепер, включающий базовую машину, тяговую раму, соединенную с передней осью посредством шкворня с шаровой опорой, ковш с реясущим ножом, шарнирио связанный с тяговой . Рс1мой и закрепленный на задней оси, и датчик положения ковша со шкалой, стрелкой и регулятором установки нуля С2 J. . Недостатками указанного устройств являются его сложность, так как кине матическая связь между датчиком и стрелкой выполнена из значительного числа достаточно сложных приборов, а датчик сам является составным (сдв енным) для обеспечения его реагирования на поперечные перекосы ковша, недостаточная надежность, определяемая возможностью отказа любого из приборов и искажением информации, на которую влияют погодные и грунтовые условия, а также подпор со сторо ны призмл волочения, так как дополни тельные колеса расположены перед заслонкой ковша, незащищенность устрой ства от. повреждения в процессе копания, отсутствие у оператора объектив ных данных о толщине стружки, так как задаваемая из кабины толщина стружки из-за проседания или, наоборот, выпучивания грунта под дополнительными колесами датчика не может быть выдержана, что приводит к нарушению рационального.режима работы и недобору в ковш. Сложность устройства не разгружает оператора от необходимости коррек тировать толщину стружки по визуальному наблюдению за работой машины. Цель изббретения - упрощение конструкции , повышение надежности ее работы, постоянное обеспечение оператора объективными данными о толщине стружки и защищенность устройства от повреждения в процессе копания. Поставленная цель достигается тем что у скрепера, включающего базовую машину, тяговую раму, соединенную с передней осью посредством шкворня с шаровой опорой, ковш с режущим ножом, шарнирно связанный с тяговой рамой и закрепленный на задней оси, и датчик положения ковша со шкалой,стрелкой и регулятором установки нуля, датчик тюложения ковша выполнен в виде двуплечего рычага, шарнирно закрепленного на торцевой части шаровой, опоры и связанного одним из своих плечей посредством гибкой тяги - с регулятором установки нуля, а другим - посредством подпружиненного стержня со стрелкой, пропущенного в вертикальное отверстие, выполненное в шкворне. На фиг. 1 изображен скрепер; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, момент касания ножом грунта; на фиг. 4 - то же, при максимальной стружке; на фиг. 5 график зависимости угла наклона шкворня ет толщины стружки; На фиг. б - шкворень при транспортном положении ковша, на фиг. 7 - сечение А-А на Фиг. 6; на фиг. 8 - вид ; Б на фиг. 6, на фиг. 9 - сечение В-В на фиг. 6; на фиг. 10 - положение элементов датчика при транспортном положении ковша; на фиг. 11 - то же, (при максимальном наклоне шкворня назад по ходу движейия; на фиг. 12 график зависимости сигнала-сдвига жесткой ТЯГИ от угла наклона шкворня назад; на фиг. 13 - положение элементов датчика при максимальном наклоне шкворня вперед; на фиг. 14 то же, поперечный наклон шкворня или передней оси; на фиг. 15 - схема изменения положения гибкой тяги при поперечных наклонах передней оси относительно шкворня. Символами обозначены: oi- угол наклона шкворня в плоскости движения от вертикального (транспортного) положения, момент касания ножом грунта oij-T2 максимальные углы, Ь - толщина стружки, у УГОЛ наклона шкворня в поперечном направлении относительно плоскости движения, Л ,у, расстояние от шарнира крепления жесткой тяги к двуплечему рычагу до торца шкворня в транспортном положении, при максимальном наклоне шкворня и в любой момент, 1 (5 -Л: - величина сигнала, Ъ - поперечное смещение связанное с гибкой тягой плеча двуплечего рычага, /i- угол поперечного поворота гибкой тяги от номинального положения при поперечных наклонах шкворня или передней осиi 5 - изменение положения связанного с гибкой тягой плеча двуплечего рьгаага, вызванное поперечными поворотами шкворня или передней оси. На фиг. 12 заштрихованы рабочие диапазоны ib пределах действительной толщины стружки).угл наклона шкворня и сигнала применительно к прицепному скреперу ДЗ-137 Скрепер содержат переднюю ось 1 колеса 2, тяговую раму 3с шарниром 4 ее соединения с ковшом 5, имеющим нож б, шкворень 7 с шаровой опорой соединяющий тяговую раму 3 с передней осью 1, и базовую 1ашину 8с системами управления cKperjepoM. Датчик положения ковша включает установленный на торцевой части шаровой опоры шкворня 7 кронштейн 9 с качающимся двуплечим рычагом 10, одно плечо которого гибкой тягой 11 соединено с установленным на передней оси 1 регулятором 12 установки нуля, а второе посредством стержня 13 через рычаг 14 и валик 15 - со стрелкой-уюазателем 16, острие которой располагается у шкалы 17, установленной на тяговой раме 3 напро тив окна оператора базовой машины 8 Стержень 13 для удобства монтажа выполнен разъемным с размещением на разъеме взаимодействующего со шкворнем 7 упора 18. Пропущенная внутри шкворня 7 часть стержня 13 снабжена пружиной 19, упирающейся в тягу 13 через стакан 20 и,штифт 21 и в шкв.орень 7 через упор 22. В шарнирах соединения стержня 13 с рычагами 10. и 14 установлены сферические подшипники 23. Натяжное приспособление 12 ааконтрено кожухом 24, Валик 15 размещен в подшипниковой втулке 25, консольно закреп ленной на стенке тяговой paivu 3. Работает устройство следующим образом. ) При транспортном положении ковша 5 пружина 19 оттягивает стержень 13 вниз, за счет чего рычаг 14 через валик 15 удерживает стрелкууказатель 16 в верхнем положении вне шкалы 17. При опускании ковша 5 опускается связанный с ним шарнир 4 тяговой рамы 3, за счет чего последняя вместе с защемленным в ней шкворнем 7поворачивается по часовой стрелке в удерживаемой базовой машиной 8 в относительно неизменном положении передней оси 1. Это приводит к тому,, что кронштейн 9 уходит влево от своего трансйортного положения и. уводит за собой шарнир крепления двуплечего рычага 10 (фиг. 11). За счет того, что гибкая тяга 11 не позволяет уйтИ влево, связанному с ней плечу двуплечего рычага 10, последний- разворачивается против часовой стрелки и, сжимая пружину 19, сдвигает вверх стержень 13. Он-, приводит к повороту против часовой стрелки системы рычаг 14 - валик 15 - стрелка-указатель 16. В момент касания ножом б грунта (фиг, 3) стрелка-указатель 16 располагается Напротив отметки нуль шкалы 17 (второе сверху положение стрелки на фиг. б). Точная регулировка этого положения достигается поворотом натяжного приспособления регулятора 12 установки нуля при снятом кожухе 24. При необходимости гибкая тяга 11 может быть изменена по длине пере.пасовкой каната. По окончании регулировки натяжное приспособление регулятора 12 установки нуля должно быть законтрено кожухом 24, Поворот шкворня 7 характеризует заглубление ковша 5. На поворот шкворня 7 вызывает поворот в противоположном направлении двуплечего рычага 10 и перемещение, относительно шкворня 7 стержня 13, которое является сигналом, отсчитываемым по шкале 17 и также характеризующим заглубление ковша 5. COOTветствукидая зависимость яв-ляется линейной. Выявление (фиг.5) рабочего диапазона углов Ы поворота шкворня 7, соответствующих кинематически возможным значениям толщины стружки для данного скрепера, позволяет выявить рабочий диаапзон сигналов 1 , соответствующий вертикальному сдвигу жесткой тяги 13 с момента касания ножом грунта (на фиг. 12 заштрихованы). Разбивка делений шкалы 17 (фиг.7), т.е. выбор кинематической длины дтрелки-указателя 16, производится с учетом возможности отчетливого наблюдения за показаниями устройства из кабины базового трактора В. В процессе копания возможны незначительные искажения в показаниях устройства, вызванные поперечными качаниями передней оси 1 и тяговой рамл 3 со шкворнем 7 друг относительно друга (фиг. 14). В моменты проседания одного из колес 2 или преодоления им препятствия гибкая тяга 11 отклоняется от своего номинального положение в плоскости чертежа (фиг. 10 и 11), принятого для построения графиков фиг. 5 и 12. ОднакЬ значительная длина R гибкой тяги 11 приводит к тому, что поперечное смещение ее подвижного конца Ъ , ограниченное упорами передней оси 1, образует .небольшой угол р с ее расчетным .для построения графиков положением.
Тангенциальное смещение этой точки б вообще невелико, что и определяет незначительность искажения показаний стрелки-указателя 16 от действительной толщины стружки.
Возможно несколько характерных положений стрелки-указателя 16 (фиг. 6). Верхнее положение соответствует транспортным переездам, но это положение подвижно из-за возможности вертикального смещения дышла передней оси 1, вызванного неровностями дорог. Ниже показано положение стрелки-указателя 16 в момент начала заглубления ковша 5, еще ниже - при максимальной толщине стружки h . В этом диапазоне стрелка-указатель 16 при копании непрерывно меняет свое положение (дрожит).из-за различия траекторий движения всех четырех колес 2 скрепера, но значительная база машины приводит к тому что эти колебания невелики и при наблюдении за стрелкой из кабийы базового трактора .8 практически незаметны. Самым нижним положением стрелки-указателя 16 является, случай максимального наклона шкворня 7 назад (фиг. 11), ограниченного механическим контактом тяговой рамы 3 и передней оси 1. Это случай наблюдается при транспортных переездах, когда трактор съехал на откос насыпи, а скрепер еще-находится на горизонтальном ее участке.
. Однако в каждом цикле работы сркепера возможен и противоположный случай, когда при подъезде к насыпи трактор 8 уже въехал на ее откос. При этом передняя ось 1 так поворачивается относительно тяговой рамы 3, что шкворень 7 оказывается наклоненным вперед (фиг. 13) В этот момент пружина 19 получает ,- возможность максимального расслабления, она оттягивает вниз жесткую тягу 13 до положения, ограниченного Контактом упора 18 в верхний торец
шкворня 7. Хотя двуплечий рычаг 10 занимает крайнее левое положение (стрелка-указатель 16 поворачивается еще выше указанного на фиг. 6 верхнего положения), длина гибкой
тяги 11 превышает расстояние между ее точками крепления и она свободно провисает вниз, касаясь конструкции передней оси 1. При возврате шкворня 7 в исходное положение .гибкая
тяга 11 опять натягивается, так как двуплечий рычаг 10 уходит влево, поворачиваясь против часовой стрелки, поднимая вверх жесткую тягу 13, сжимая пружину 19 и поворачивая стрелку-указатель 16 в верхнее (фиг. 6) положение.
Тем самым гибкая тяга 11 своей гибкостью выполняет две функции, обеспечивая возможность беспрепятственного ее складирования при повороте передней оси 1 дыилом вверх (или шкворнем 7 вперед) и беспрепятственного поворота тяги 11 в сторону с одновременным скручиванием при
5 поперечных качаниях передней оси 1.
Третья функция гибкой тяги 11 выявляется при поворотах скрепера в горизонтсшьной плоскости, когда передняя ось 1 поворачивается вокруг оси шкворня 7 на угол до 90°(не показан). При этом гибкая тяга 11 беспрепятственно поворачивается вокруг связанного с ней плеча двуплечего рычага 10.
Таким образом, предлагаемое устройство обеспечивает надежное функционирование при любых ситуациях, возникающих в цикле работы скрепера, обладает большой простотой, надежностью и защищенностью конструкции, которая практически является безотказной. Непрерывная информащй о толщине стружки способствует, поддержанию наиболее эффективного режима работы и увеличению набора грунта в ковш - производительности скрепера
| название | год | авторы | номер документа |
|---|---|---|---|
| Скрепер | 1982 |
|
SU1099010A1 |
| Скрепер | 1982 |
|
SU1063946A1 |
| СКРЕПЕР | 2004 |
|
RU2283923C2 |
| СПОСОБ КОПАНИЯ ГРУНТОВ СКРЕПЕРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2039161C1 |
| СКРЕПЕР | 2001 |
|
RU2188279C1 |
| СКРЕПЕР | 2011 |
|
RU2460850C1 |
| СКРЕПЕР | 2007 |
|
RU2348761C1 |
| Скрепер с двухщелевой загрузкой | 1981 |
|
SU1016436A1 |
| Скрепер | 1979 |
|
SU808605A1 |
| Тягово-толкающее устройство скреперного поезда | 1981 |
|
SU981023A1 |
СКРЕПЕР, включающий базовую машину, тяговую раму, соединенную с передней осью посредством шкворня с шаровой опорой, ковш с режущим ножом, шарнирно связанный с тяговой рамой и закрепленный на задней оси, и датчик положения ковша со шкашой, стрелкой и регулитором установки нуля, о тличающийся тем, что, с целью упрощения конструкции, датчик положения ковша выполнен в виде двуплечего рычага, шарнирно закрепленного на торцевой части шаровой опоры и связанного одним из своих плечей посредством гибкой тяги - с регулятором установки нуля, а другим - посредством подпружиненного стержня со стрелкой, пропущенного в вертикальное отверстие, выполненное в шкворне.
/7 /
uz. 2
фиъ 5 ВиЗв TifUy/ Фиг. 9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3394474, кл | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОВШОМ СКРЕПЕРА | 0 |
|
SU294909A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
