(Л
4
:о сд
.
3. U9
цикла копания при помощи задатчика
32 угла поворота тяговой рамы назначают величину Cfo начального заглубления ковша 2. Код q через шинный формирователь 32 и регистр 10 поступает на вход элемента сравнения (ЭС) 9. На другой вход ЭС 9 поступает код от АЦП 8, соответствующий сигналу датчика (Д) 7 начального заглубления. В процессе копания грунта измеряют действительную скорость скрепера с помощью Д 5 скорости движения, уста новленного на тягаче 1 . Код измерен-- ной скорости сравнивают в элементах сравнения 14 и 15 с задатчиками 16 и 17 пределов скорости. По результату сравнения кодов управляют электрогид- рораспределителем 4, который посред- ством гидроцилиндров 3 вертикального перемещения ковща выглубляет (за глубляет) ковш скрепера. Контроль за наполнением ковша ведут с помощью
7
дополнительно установленного Д 6 уровня грунта. В процессе каждого гдакла копания ei O выходной код через блок 20 элементов И в ЭС 21 сравнивается с кодом задатчика 22 минималь ного расстояния от излучателя до поверхности грунта в ковше. Одновре менно ведут контроль времени наполне НИН ковша счетчиком 30, на которьй поступают импульсы от генератора 29 через элемент И 27. Управление работой устройства по заданным условиям осуществляют вычислителем 25. Кроме того, схема устройства содержит четыре триггера 11, 12, 18 и 23, два элемента задержки 24, 28, одновиб- ратор 26, два переключателя 13 и 33, элемент ИЛИ 19. По минимальному времени заполнения ковша выбирается оптимальный угол начального заглубления. 2 с.п. ф-лы, 5 ил.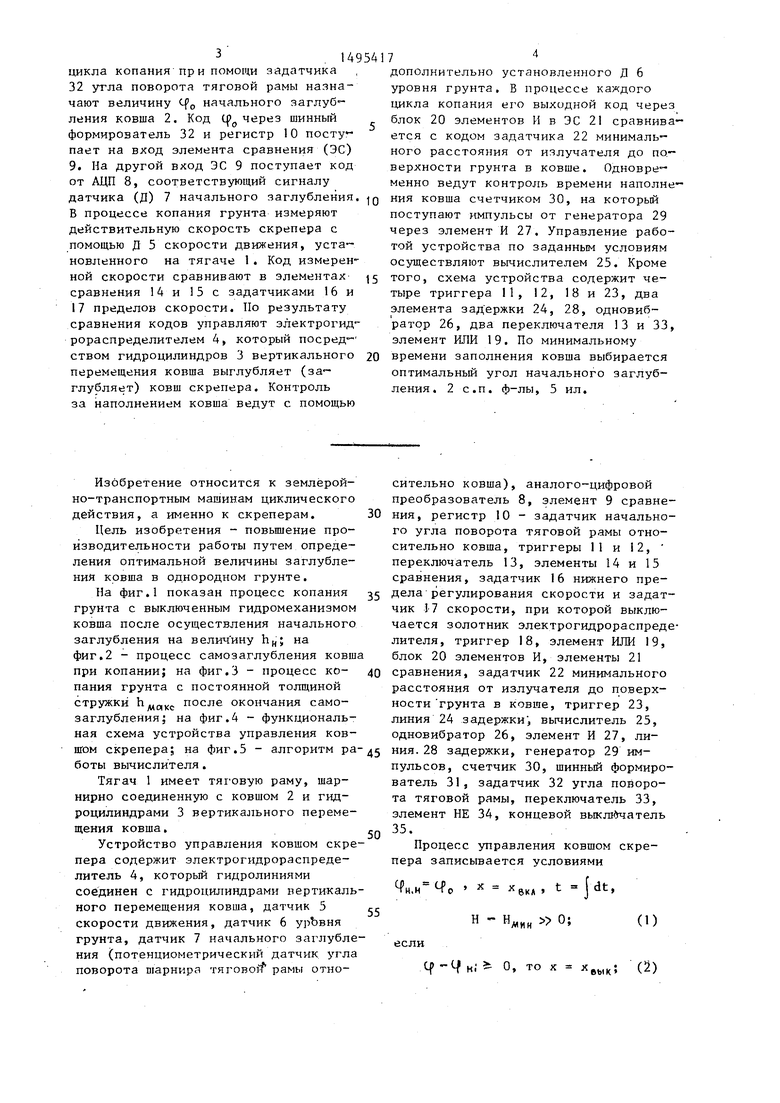


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления ковшом скрепера | 1987 |
|
SU1578278A1 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| СКРЕПЕР | 2001 |
|
RU2188279C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Система управления рабочим процессом землеройно-транспортной машины | 1985 |
|
SU1283313A1 |
| Система управления рабочим органом землеройной машины | 1988 |
|
SU1548365A1 |
| СКРЕПЕР | 2004 |
|
RU2283923C2 |
| СКРЕПЕР | 2003 |
|
RU2247194C1 |
| СКРЕПЕР | 2011 |
|
RU2460850C1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |

Изобретение относится к землеройно-транспортным машинам циклического действия и позволяет автоматически управлять ковшом скрепера. Целью изобретения является повышение производительности работы путем определения оптимальной величины заглубления ковша в однородном грунте. Для этого перед началом первого цикла копания при помощи задатчика 32 угла поворота тяговой рамы назначают величину φO начального заглубления ковша 2. Код φO через шинный формирователь 32 и регистр 10 поступает на вход элемента сравнения (ЭС) 9. На другой вход ЭС 9 поступает код от АЦП 8, соответствующий сигналу датчика (Д) 7 начального заглубления. В процессе копания грунта измеряют действительную скорость скрепера с помощью Д 5 скорости движения, установленного на тягаче 1. Код измеренной скорости сравнивают в элементах сравнения 14 и 15 с задатчиками 16 и 17 пределов скорости. По результату сравнения кодов управляют электрогидрораспределителем 4, который посредством гидроцилиндров 3 вертикального перемещения ковша выглубляет (заглубляет) ковш скрепера. Контроль за наполнением ковша ведут с помощью дополнительно установленного Д 6 уровня грунта. В процессе каждого цикла копания его выходной код через блок 20 элементов И в ЭС 21 сравнивается с кодом задатчика 22 минимального расстояния от излучателя до поверхности грунта в ковше. Одновременно ведут контроль времени наполнения ковша счетчиком 30, на который поступают импульсы от генератора 29 через элемент И 27. Управление работой устройства по заданным условиям осуществляют вычислителем 25. Кроме того, схема устройства содержит четыре триггера 11,12,18 и 23, два элемента задержки 24,28, одновибратор 26, два переключателя 13 и 33, элемент ИЛИ 19. По минимальному времени заполнения ковша выбирается оптимальный угол начального заглубления. 2 с.п. ф-лы, 5 ил.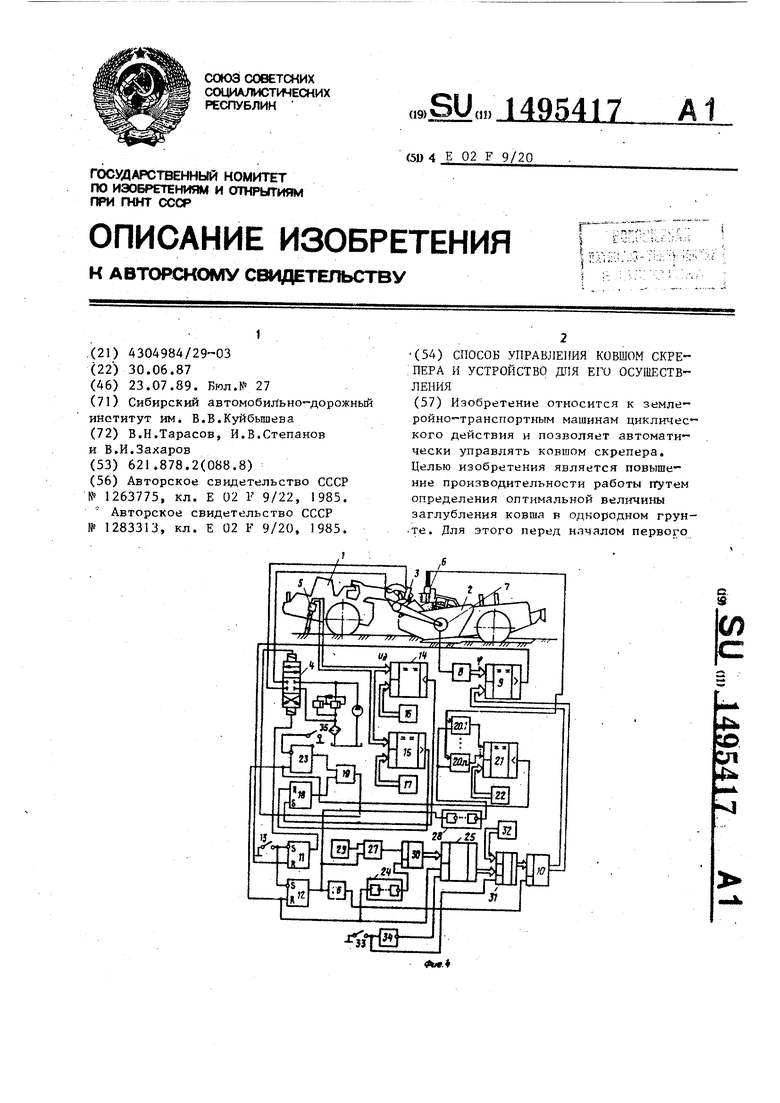
Изобретение относится к землёрой- но-транспортным машинам циклического действия, а именно к скреперам.
Цель изобретения - повышение производительности работы путем определения оптимальной величины заглублений ковша в однородном грунте.
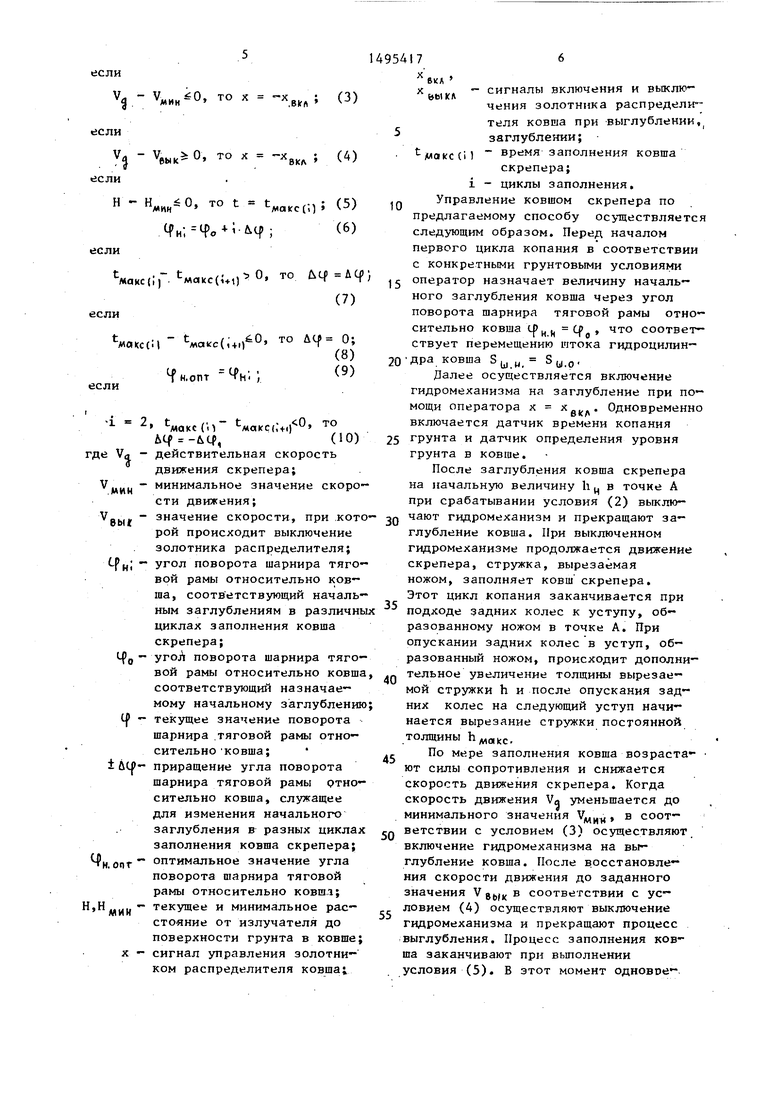
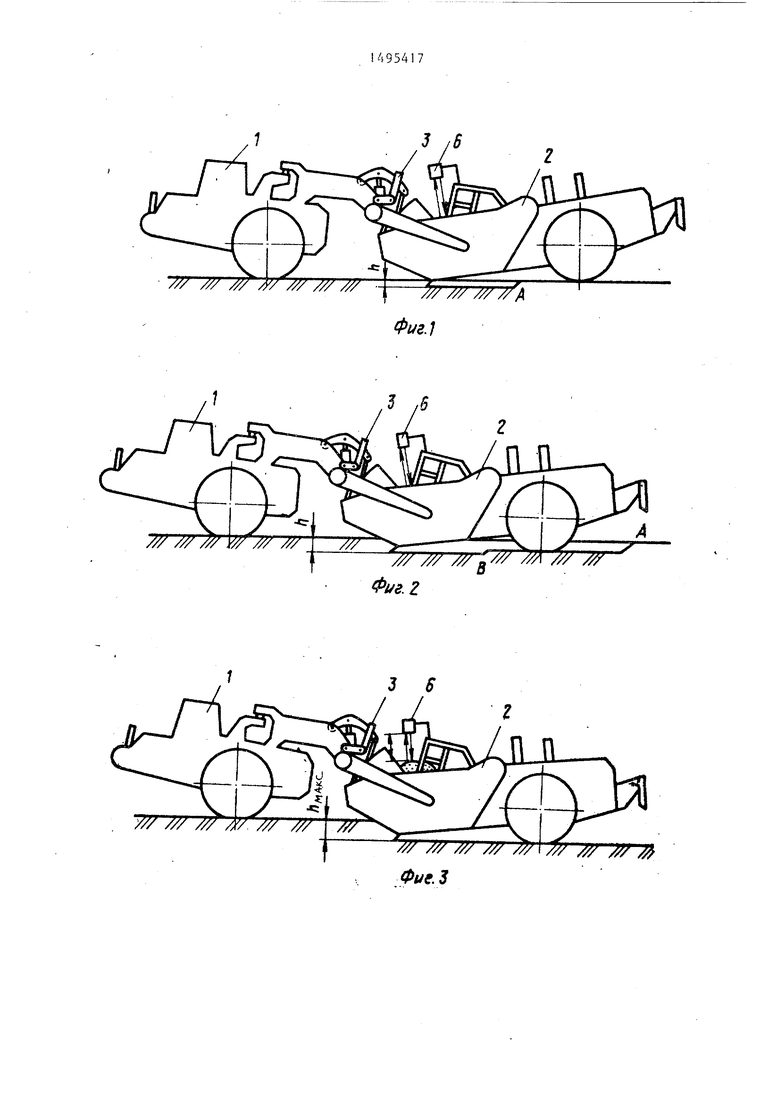
На фиг.1 показан процесс копания грунта с выключенным гидромеханизмом ковша после осуществления начального заглубления на величину на фиг.2 - процесс самозаглубления ковш при копании; на фиг.З - процесс ко- пания грунта с постоянной толщиной стружки , после окончания само- заглублеНия; на фиг.4 - функциональная схема устройства управления ковшом скрепера; на фиг.5 - алгоритм ра боты вычислителя.
Тягач 1 имеет тяговую раму, шар- нирно соединенную с ковшом 2 и гидроцилиндрами 3 вертикального перемещения ковша.
Устройство управления ковшом скрепера содержит электрогидрораспреде- литель 4, который гидролиниями соединен с гидроцилиндрами вертикального перемещения ковша, датчик 5 скорости движения, датчик 6 урЪвня грунта, датчик 7 начального заглубления (потенциометрический датчик угла поворота шарнира тяговой рамы относительно ковша), аналого-цифровой преобразователь 8, элемент 9 сравнения, регистр 10 - задатчик начального угла поворота тяговой рамы относительно ковша, триггеры 11 и 12, переключатель 13, элементы 14 и 15 сравнения, задатчик 16 нижнего предела регулирования скорости и задатчик 17 скорости, при которой выключается золотник электрогидрораспред лителя, триггер 18, элемент ИЛИ 19, блок 20 элементов И, элементы 21 сравнения, задатчик 22 минимального расстояния от излучателя до поверхности грунта в ковше, триггер 23, линия 24 задержки , вычислитель 25, одновибратор 26, элемент И 27, линия. 28 задержки, генератор 29 импульсов, счетчик 30, шинный формирователь 31, задатчик 32 угла поворота тяговой рамы, переключатель 33, элемент НЕ 34, концевой выклр1 чатель 35.
Процесс управления ковшом скрепера записывается условиями
Я н. хц,, , t Jdt,
и - н
мии
0;
(1)
если
Ч - Hi О, то X X
вы к
(2)
- V«.,, то X -X
.BkA
- V...,., О, то X X
еык
ВКА
-«,.
то t t
люкс (i)
.Мр;
(3)
(4)
(5) (6)
если
Wed,- мс,кс(;м)0 ° .)
(7)
если
если
максС - мс,.с(,
{н.опт .;
° -маке( 11 -ма(С(,Ч()
V
мин
Bblt
-Рн;то
&Ц -ЛС|),(10)
де V(i - действительная скорость движения скрепера; минимальное значение скорости движения;
значение скорости, при которой происходит выключение золотника распределителя; угол поворота шарнира тяговой рамы относительно ковша, соотв етствующий начальным заглублениям в различных циклах заполнения ковша скрепера;
Ц о - угоЛ поворота шарнира тяговой рамы относительно ковша, соответствующий назначаемому начальному заглублению; Ц1 „ текущее значение поворота шарнира .тяговой рамы относительно ковша;± приращение угла поворота
щарнира тяговой рамы относительно ковша, служащее для изменения начального заглубления в разных циклах заполнения ковша скрепера; оптимальное значение угла поворота шарнира тяговой рамы относительно ковшл; текущее и минимальное расстояние от излучателя до поверхности грунта в ковше; X - сигнал управления золотником распределителя ковша;
.
опт
,н
мин
X
вКА ОЫКА
10
15
20
25
30
35
40
45
50
55
- сигналы включения и выключения золотника распределителя ковша при выглублении, заглублении; Макс (11 время заполнения ковша
скрепера;
i - циклы заполнения. Управление ковшом скрепера по предлагаемому способу осуществляется следующим образом. Перед началом первого цикла копания в соответствии с конкретными грунтовыми условиями оператор назначает величину начального заглубления ковша через угол поворота шарнира тяговой рамы относительно ковша ср ц Cf , что соответствует перемещению штока гидроцилин- дра ковша S Зц.р,
Далее осуществляется включение гидромеханизма на заглубление при помощи оператора х .- Одновременно включается датчик времени копания грунта и датчик определения уровня грунта в ковше.
После заглубления ковша скрепера на начальную величину h ц в точке А при срабатывании условия (2) выключают гидромеханизм и прекращают заглубление ковша. При выключенном гидромеханизме продолжается движение скрепера, стружка, вырезаемая ножом, заполняет ковш скрепера. Этот цикл копания заканчивается при подходе задних колес к уступу, образованному ножом в точке А. При опускании задних колес в уступ, образованный ножом, происходит дополнительное увеличение толщины вырезаемой стружки h и после опускания задних колес на следующий уступ начинается вырезание стружки постоянной толщины ..
По мере заполнения ковша возраста- ют силы сопротивления и снижается скорость движения скрепера. Когда скорость движения Va уменьшается до минимального значения ,, в соответствии с условием (3) осуществляют включение гидромеханизма на вы- глубление ковша. После восстановления скорости движения до заданного значения V g(,| в соответствии с условием (4) осуществляют выключение гидромеханизма и прекращают процесс выглубления. Процесс заполнения ковша заканчивают при вьшолнении условия (5). В этот момент одновоеMriHHO осуществляют запоминание первого заполнения ковша t (i) После этого осуществляют транспортиро вание грунта к месту выгрузки и возвращение скрепера в забой для выполнения второго процесса копания.
Перед началом второго цикла копания изменяют начальное заглубление- путем изменения угла поворота шарни- ра тяговой, рамы- относительно ковша (т.е. путем изменения перемещения штоков гидроцилиндров 3 на величину US) по условию (6) на величину Л tf,
Второе заполнение ковша выполня ют в рассмотренной последовательности, в результате которого определяют время заполнения t (a)
Перед осуществлением третьего цикла заполнения ковша анализируют полу ченные результаты. Если удовлетворяется .условие (7), то перед осуществлением следующего набора ковша снова изменяют величину угла поворота шарнира тяговой относительно ковша по условию (6) в том же направлении и повторяют рассмотренные, циклы до срабатывания условия (8), которое соответствует оптимальному значению угла поворота шарнира тяговой рамы относительно ковша, т.е. перемещению штоков, по условию (9) в однородных грунтовых условиях. Если перед осуществлением третьего заполнения ковш выполнялось условие (10) алгоритма, то принимают Л(-р что означает необходимость осуществления поиска оптимальной величины начального заглубления в другом направлении, .в зоне меньших значений угла поворота тяговой ,рамы относительно ковша.
Работа устройства управления ковшом скрепера осуществляется следующим образом.
Перед началом первого цикла копа- НИН, когда ковш скрепера находится в транспортном положении в соответствии с конкретными грунтовыми условиями, назначают величину начального заглубления ковша путем задания при помощи задатчика 32 начального утла поворота щарнира тяговой рамы относительно ковша ( . При кратковременном замыкании контактов переключателя 33 сигнал логического О . поступает на вход логического элемен та НЕ 34 и на вход управления вьща- чей информации шинного формирователя 31. По этому сигналу параллельный ко
с выхода задатчика 32 через шинный формирователь 31 поступает на входы двухнаправленного порта вычислителя i- однокристалльной микpoЭB . В соответствии с алгоритмом работы микроЭВМ (фиг.5) по сигналу с выхода логического элемента НЕ 34, поступающего на один из входов порта Р2, осуществляет ся запись кода начального угла ср в двухнаправленньй порт РО. Затем при кратковременном замыкании контактов переключателя 13 RS-триггеры 11 и 12 устанавливаются в состояние логической 1. Сигнал с выхода RS-триггера 1 1 включает электрогидрораспределитель 4 на заглубление режущей кромки ковша скрепера х в соответствии с условием (1). Сигнал с выхода RS- триггера 12 через одновибратор 26 поступает на вход разрешения записи буферного регистра 10. По этому сиг-, налу код начального угла ( из порта РО микроэвм через шинньй формирователь 31 заносится в буферный регистр 10. Одновременно сигнал с выхода RS-триггера 12 при помощи логического элемента И 27 соединяет выход генератора 29 с счетным входом счетчика 30 (датчик времени копания) и при помощи блока 20 элементов И выход датчика 6 уровня грунта с первым входом элемента 21 сравнения. При опускании ковща скрепера происходит изменение угла поворота if . Сигнал с выхода датчика 7 начального заглубления, преобразованный аналого- цифровым преобразователем 8 в код, поступает на первьй вход элемента 9 сравнения. На второй вход элемента сравнения поступает код с выхода буферного регистра .10, определяющий величину начального заглубления режущей кромки ковща. После заглубления режущей кромки ковша скрепера на начальную величину (фиг.1) на выходе элемента 9 сравнения в соответствии с условием (2) алгоритма появляется сигнал, которьй устанавливает RS-триггер 11 в состояние логического О, Этим сигналом злектрогидрораспрег делитель 4 выключается. С э.того момента процесс копания происходит при выключенном гидромеханизме. По мере заполнения ковша скрепера возрастают силы сопротивления и снижается скорость движения скрепера. Сигнал с вы хода датчика 5 скорости движения потч ступает на первые входы элементов9U
14 и 15 сравнения вторые входы которых связаны с выходами задатчиков 16 и 17 минимальной скорости движени лдич скорости движения V, при которой происходит выключение золот ника электрогидрораспределителя 4. Когда скорость движения Va уменьшается до минимального значения V, в соответствии с-условием (3) на вы- ходе элемента 14 сравнения появляется сигнал, которьй устанавливает RS-триггер 18 в состояние логической 1. Этим сигналом осуществляется включение электрогидрораспределителя 4 на выглубление ковша скрепера. После восстановления скорости движения V« до значения в соответствии с условием (4) на выходе элемента сравнения 15 появится сигнал, который устанавливает RS-триггер 18 в состояние логического О, По этому сигналу электрогидрораспределитель 4 выключается, и выглубление ковша прекраща-. ется. Далее копание происходит при выключенном гидромеханизме. При заполнении ковша грунтом текущее значение расстояния из излучателя до уровня грунта в ковше Н с выхода датчика 6 уровня гр унта, поступающее на первый вход элемента сравнения 21, сравнивается с заданным расстоянием Нд,„, поступающего с выхода задатчика 22 на второй вход элемента 21 сравнения. При вьтолнении ус- ловия (5) на выходе элемента 21 сравнения формируется сигнал, которьй устанавливает RS-триггер 23 в состояние логической 1. Сигнал с выхода RS-триггера 23, проходя через логи- ческий элемент ИЛИ 19, включает электрогидрораспределитель 4 на вы- глубление ковша. Одновременно сигнал с выхода элемента 21 cpaвнeн я поступает на входной порт Р2 микроЭВМ, по которому осуществляется запись в порт Р микроэвм кода времени к опа- ния t/mgKcd) (фиг.5) и на вход триггера 42, который устанавливается в состояние логического О и через линию 24 задержки, осуществляющую фиксированную временную задержку, на вход R счетчика 30. Когда ковш займет транспортное положение, замыкаются контакты концевого выключателя 35. Сигнал логического С поступает на вход RS-триггера 23, устанавливая . его в состояние логического 0. Этим
L
сигналом выключает гидромеханизм.
17
10
jg 5 20 25 30 35 40
0
5
1 соответствии с алгоритмом работы микроэвм (фиг.5) осуществляется запоминание времени заполнения ковша t tfKaKc(ii в соответствии с условием (5). Затем в соответствии с условием (6) осуществляется занесение в порт РО нового значения угла поворота . После транспортирования, разгрузки, возвращения скрепера в забой заполнение ковша вьтолняется в рассмотренной последовательности, в результате которого в порт Р1 записывается время копания t,,
t макс (2) Перед осуществлением третьего цикла копания (фиг.5) анализируются полученные результаты. Если выполняется условие (7), то перед осуществлением следующего набора ковша снова изменяется величина угла поворота по выражению (6) в том же направлении и повторяют рассмотренные циклы до срабатывания условия (8), которое соответствует оптимальному углу поворота (-р|,опг ° выражению (9) в соответствующих грунтовых условиях, Если перед выполнением третьего копания выполнялось условие (10), то принимают й( - utf (фиг. 5), что означает необходимость поиска оптимальной величины начального заглубления в другом . направлении,в зоне меньших значений поворота угла тяговой рамы относительно ковша.
Далее процесс поиска оптимальной величины начального заглубления производится в рассмотренной последовательности.
Формула изобретения
2, Устройство для управления ков шом скрепера, содержащие-.датчик на чального заглубл ения ко вша, датчик скорости движения скрепера, ход которого со| динен с первыми входами первого и второго блоков сравне |Ния, выходы которых соединены с пер- вым и вторым входами первого триггера, .первьш и второй задатчики регулирования скорости, выходы которых соединены с вторьтми входами .первого и второго блоков сравнения, элементы ИЛИ и И, второй, третий и четвертый триггеры, одновибратор, счетчик, электрогидрораспределитель, о т л и- ч а-ю щ е е с я тем, что, с целью повышения производительности работы путем определения оптимальной величины заглубления ковша в однородном грунте, в устройство введены две линии задержки, третий и четвертый блоки сравнения, элемент НЕ, два переключателя, концевой выключатель, аналого-цифровой преобразователь, блок элементов И, задатчик минимального расстояния от излучателя до поверхности грунта в ковше, генератор импульсов, регистр, шинный формирователь, вьиислитель, датчик уровня грунта и задатчик угла поворота тяговой рамы, вь1ход которого соединен с первым входом шинного формирователя, выход которого coe;jK- нен с первым входом регистра, выход которого соединен с первым входом третьего блока сравнения, выход которого соединен с первым входом второго триггера, выход которого соединен с первым, входом злектрогидрорас-
пределителя, выход первого переключателя соединен с первым входом третьего триггера, ВЫХОД которого соединен,
с первым входом элемента ИЛИ, выход которого соединен с вторым входом электрогидрораспределителя, выход дат.чика уровн грунта соединен с одними входами блока элементов И, выход
которого соединен с первым входом четвертого блока сравнения, выход которого соединён с вторым входом третьего триггера, первым входом вычислителя, первым входом четвертого
триггера и через первую линию задержки - с первым входом счетчика, выход которого соединен с вторым входом вычислителя, выход которого соединен с вторым входом шинного формирова-
теля 5 выход концевого выключателя соединен с третьим входом шинного . формирователя и через элемент НЕ - с третьим входом вычислителя, выход второго переключателя соединен с
вторым входом второго триггера и вторым входом четвертого триггера, выход которого соединен с входом одновибратора, первым входом элемента И и через второй элемент задержки с другими входами блока элемента И, выход генератора импульсов соединен с вторым входом элемента И, выход которого соединен с вторым входом счетчика, выход одновибратора соединен с вторым входом регистра, выход первого триггера соединен с вторым входом элемента ИЛИ, выход датчика начального заглубления с в ходом аналого-цифрового преобразователя, выход которого соединен с вторым входом третьего блока сравнения,-выход за- датчика минимального расстояния от излучателя до поверхности грунта в ковше соединен с вторым входом четвер того блока сравнения.
/// //////////////////
///////// /X/ /// ///
J /5
/// /// // f(
ФигЛ
///////// я/
Фиг.1
В
/// ///
3 6
/ х
Фие.З
(
Определение экстремума, бремени копания
Нет ретье копание
HajNO eHue
Г Порт fli - вяов I разрешения 88ada Hoi cMbffOgo /sjia If,
Порт P0 - Sxod tf
I Порп PI хопения Пор1п P2 8x0 trroHci L ffopm P0 StDtod
C3onoMuMoffue Spefff t колония inami.
Т 6ь/1 ислем1 е начольноео
Vm
CBtifo jHff vsMt/ Hi /jo/3mP0
| Способ управления рабочим процессом землеройной машины | 1985 |
|
SU1263775A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления рабочим процессом землеройно-транспортной машины | 1985 |
|
SU1283313A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
