Изобретение относится к автоматизации металлургического производства и может применяться для автоматической отбраковки труб, производимых на трубоэлектросварочных лйОо других трубных станах. Отбраковка дефектных труб предполагает последующий их ремонт..
Известна система для автоматической отбраковки труб, содержащая дефектоскоп, трубоотрезное устройство с датчиком реза, сдвигающий регистр l .
Недостатками системы являются необходимость изменения числа разрядов сдвигающего регистра и перестройка датчика реза при изменениях длины отрезаемых труб.Поэтому система применяется при неизменной длине труб.
Кроме того, система не обеспечивает качественной отбраковки труб при перемещении оси реза, т.е. при переменном продольном ходе трубоотрезного устройства в различных циклах реза. Изменение хода-трубоотрезного устройства в различных циклах реза имеет место при измерениях сечения или твердости,материала труб, при затуплении режущего ннструмен-. та и при изменениях других факторов.
Наиболее близкой к изобретению по технической сущности и .достигаемому результату является система. . для автоматической отбраковки труб, содержащая дефектоскоп, датчик перемещения труб, трубоотрезное устройство с датчиком реза и датчиком ист ходного положения, сдвигающий регистр,, первый счетчик, соединенный с датчиком перемещения труб, ком-, мутатор, через который дефектоскоп соединен со сдвигающим регистром, сбрасыватель дефектных труб с системой управления 2j .
Однако известная скстема не обеспечивает .трчного сопровождения дефектов на трубиой заготовке.и качественной отбраковки труб при переменном продольном .ходе трубоотрезиого .устройства в различных.циклах.отрезания труб, т.е. при изменениях.положения оси реза.. .
Цель изобретения - повьвцение качества отбраковки труб при переменном хбде трубоотрезного устройства в различных циклах ХОДА.
Поставленная цель достигается тем, что система для автоматической отбраковки труб, содержащая дефектоскоп, датчик перемещения труб, трубоотрезное устройство с датчиком реза и датчиком исходного положения, сдвигающий регистр, первый счетчик, соединенный с датчиком перемещения труб. Коммутатор, через который дефектоскоп соединен со сдвигающим регистром, сбрасыватель дефектных
труб с блоком управления, дополнительно содержит второй счетчик, два задатчика длины, два сумматора, два триггера, шесть элементов И, три одновибратора, два нуль-органа, три элемента ИЛИ и;звено задержки, причем первый вход второго счетчика соединен с датчиком перемещения труб, первые входы сумматоров - соответственно с первым и вторым задачиками длины, вторые входы первого сумматора - с выходом второго счетчика, а вторые входы второго сумматора - с числовым выходом первого сумматора, числовой и первый знаковый выходы первого сумматора соединены с вторым входом первого счетчика через первые элементы И и ИЛИ, выход BTopJoro элемента И соединен с вторым .входом первого элемента ИЛИ, первый вход второго элемента И соединен с выходом второго сумматора, а второй ,вход - с вторым знаковым выходом первого сумматора, выход первого триггера соединен с вторым входом второго счетчика, а третий вход первого счетчика - с датчиком реза, выход первого счетчика соединен через первый нульорган, первый одновибратор и второй элемент ИЛИ с вторым.входом сдвигающего регистра, при этом второй выход первого нуль-органа соединен с четвертым входом первого счетчика, числовой выход первого сумматора соединен через второй нульорган, второй одновибратор и третий элемент И с вторым входом второго элемента ИЛИ, первый знаковый выход первого сумматора и выход второго нуль-органа соединены через третий элемент ИЛИ, четвертый элемент И и второй триггер с вторым входом третьего элемента И, выход пятого элемента И соединен с вторым входом второго триггера, первый вход пятого элемента И - с вторым знаковым выходом первого сумматора, а его второй вход и. второй.вход четвертого элемента И, а также первый вход первого триггера соединены с датчиком реле, датчик исходного положени трубоотрезного устройства соединен через третий одновибратор с вторым входом первого триггера, датчик реза через звено задержки - с третьим входом -второго счетчика, кроме того датчик реза и выход сдвигающего регистра соединены с блоком управлени сбрасывателя дефектных труб ерез шестой элемент И.
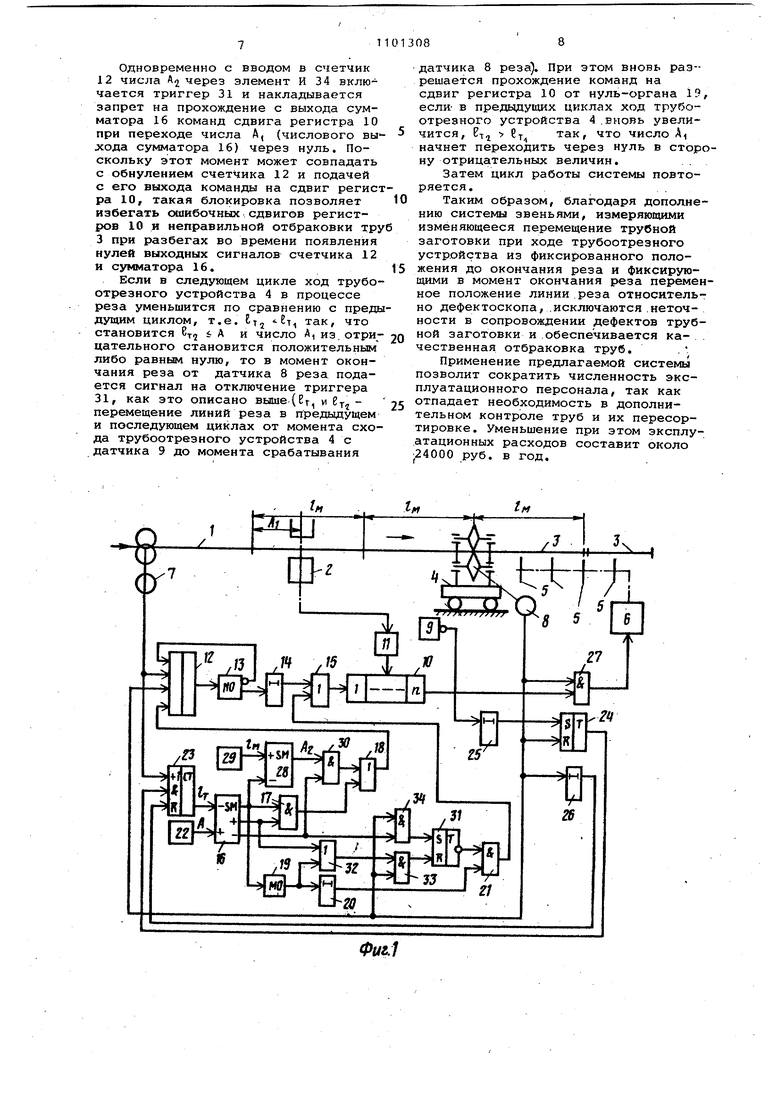
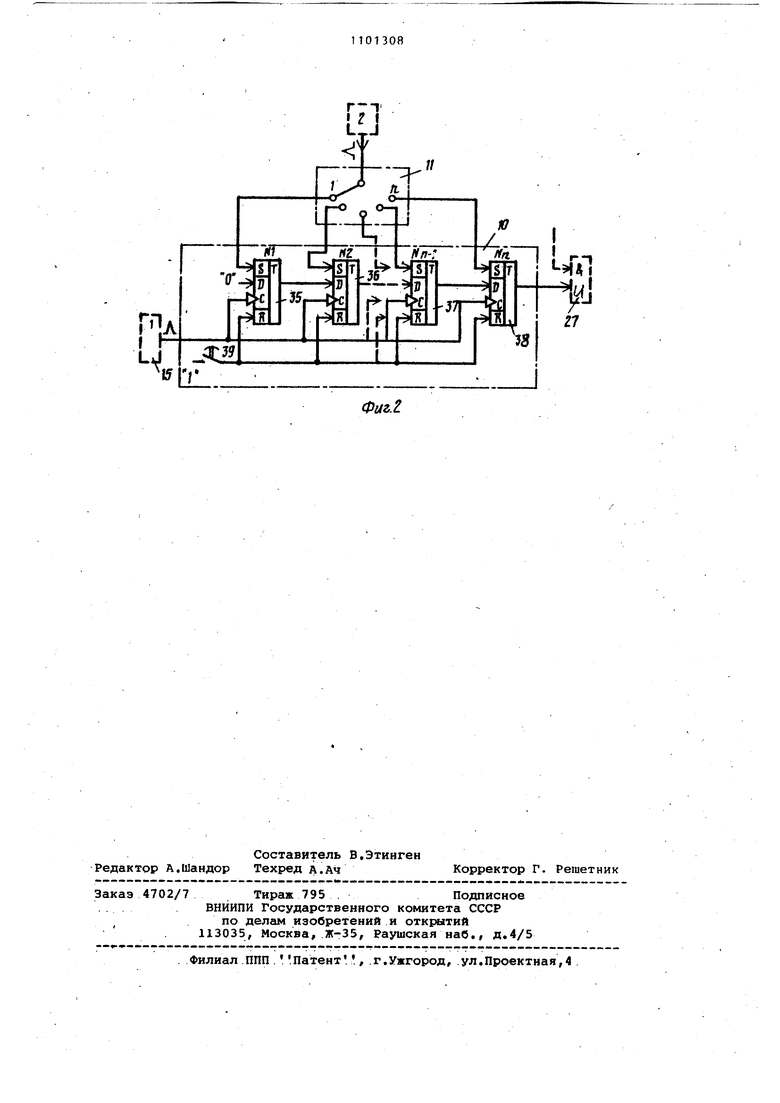
На фиг. 1 приведена функциональная схема предлагаемой системы; на фиг. 2 -:функциональные схемы комму татора и сдвигающего регистра.
Непрерывно выходящая из стана трубная заготовка 1 контролируется дефектоскопом 2 и режется на трубы 3мерной длины трубоотрезным устройством 4 с переменным продольным ходом. Дефектные трубы извлекаются из потока для последующего ремонта сбрасывателем 5, управляемым блоком б управления. Перемещение трубной заготовки 1 контролируется датчиком 7 перемещения труб. Момент окончания отрезания, труб 3 от трубной заготовки 1 фиксируется датчиком 8 реза трубног устройства 4. Для фиксации исходног положения трубоотрезного устройства 4предназначен датчик 9 исходного положения. Дефектоскоп 2 связан с входом за писи информации сдвигающего регистр 10 через коммутатор 11. Последний предназначен для включения требуемо го количества разрядов регистра 10 при изменении длины f отрезаемых труб 3. Управление сдвигом регистра 10 при сопровождении трубной заготовки 1 в процессе отрезания труб 3 осуществляется счетчиком 12, выход которого связан с входом сдвига регистра 10 через последовательно включенные нуль-орган 13, одновибра тор 14 и схему ИЛИ 15. Информационный вход счетчика 12 связан с числовым и знаковым плюс выходами сумматора 16 через последо вательно включенные схемы И 17 и ИЛИ 18, Числовой выход сумматора 16 через последовательно включенные нуль-орган 19, одновибратор 20 и схему И 21 связан с вторым входом схемы ИЛИ 15. Первый вход сумматора 16 соединен с задатчиком 22 длины, которым задается длина А соответствующая расстоянию от ближайшей к дефектоскопу 2 будущей линии реза на трубной заготовке 1 до оси дефектоског На 2 в момент схода трубоотрезного устройства 4 при включении его на рез с датчика 9 исходного положения Второй вход сумматора 16 соединен с выходом счетчика 23. Счетные входы счетчиков 12 и 23 соединены с датчиком 7 перемещения труб и по схеме И соединены: у счет чика 12 с вторым инверсным выходом нуль-органа 13, у счетчика 23 - с выходом триггера 24. -вход последнего связан через одновибратор -25 с инверсным выходом датчика 9 исходного положения, а R -вход и управляющий вход счетчика 12 соединены с датчиком 8 реза. Вход управления гашением счетчика 23связан с датчиком 8 реза через звено 26 задержки. Выход последнего разряда регистра 10 и датчик 8 реза через элемент И 27 связаны с входом .блока 6 управления сбрасывателем 5. К числовому выходу сумматора 16 подключен первый вход сумматора 28, к второму входу которого подключен задатчик 29 длины. Последним задается мерная длина Вц отрезаемых труб 3. Выход сумматора 28 связан с вторъ л входом элемента ИЛИ 18 через элемент И 30, Знаковый выход плюс сумматора 16 и выход нуль-органа 19 связаны с R -входом триггера 31 через последовательно включенные элементы ИЛИ 32 и И 33, Знаковый выход минус связан 1C S -входом триггера 31 через эле мент И 34. Знаковый выход минус сумматора 16 соединен также с вторым входом элемента И 30. Инверсный выход триггера 31 соединен с вторым входом элемента И 21, а вторые входы элементов И 33 и 34 соединены с датчиком 8 реза, : Сдвигающий регистр 10 состоит из п (п 2, 3, 4,..). разрядов соответственно числу DR5 -триггеров 35-38, а коммутатор 11 представляет собой п -позиционный переключатель. В регистре 10 выход каждого из предыдущих триггеров 35-37 подключен кЁ -входу последующих 36-38, при этом выход Nn -38 является выхоцом регистра 10, а к О -входу триггера 35 .подключен сигнал О. Установочный 5 -вход каждого трйг рера 35-38 подключен к соответствуюдей позиции коммутатора 11, С -входы всех триггеров 35-38 подключены к входу управления сдвигом информации регистра 10, К установочному R -входу всех триггеров 35-38 подключена кнопка 39 установки триггеров в О, Коммутатор 11 устанавливается в положение п- k +1, в котором выход дефектоскопа 2 подключается к 5 -входу триггера Nn-k-fl регистра. 10, здесь число К - число труб длиной (в том числе и неполной длины для последней трубы), которое укладывается в расстояние между осями дефектоскопа 2 и трубоотреэного устройства 4 (фиг. 1), т.е. коммутатор 11 выбирает К разрядов регистра 10 соответственно числу k труб, . могущих.находиться.на участке между осями дефектоскопа 2.и трубы отрезного устройства.4, . . . ДефёктоскЬп 2 при появлении дефекта в трубе 1 .устанавливает в состояние , триггер с Nn- k +1, По импульсу с выхода звена 15 происходит переписывание информации из триггера N h - k +1 в последукяций триггер h-k +2, из последнего - в триггер Nn- k + 3 и т,д,, а триггер Nn-k +1 из предыдущего разряда п-к записывается О, Описанная операЦня сдвига повторяется в каждом цикле контроля мерных длин трубы 1, Система работает следующим образом,. При непрерывном перемешивании трубной заготовки 1 момент прохожде ния под дефектоскоп 2 будущих линий реза определяется с помощью счетчика 12. Последний в момент прохождения под ним будущей линии реза обну ляется списывающими импульсами датчика 7 перемещения труб,при этом срабатывает нуль-орган 13 и через одновибратор 14 и элемент ИЛИ 15 вы дает команду на сдвиг информации, записанной от дефектоскопа 2, в последующие разряды регистра 10. При сдвиге освобождается первый разряд регистра 10, выбранный коммутатором 11,для записи информации от дефектоскопа 2 о возможных дефектах проходимой под ним б-Удущей трубы. Посл ряда опера:ций сдвига происходит передача информации в а-й последний разряд регистра 10 о наличии Дефектов в трубе 3, которая должна отрезаться тр боотрезным устройством 4 в текущем цикле реза. Если отрезаемая труба 3 имеет дефекты, о чем свидетельствует наличие информации в последнем fl -ом разряде регистра 10, по сигна лу датчика 8 реза через звено И 27 вклк1чается сбрасыватель 5 и извлекает из потока для последующего ремонта дефектную трубу 3. Поскольк трубоотрезное устройство 4 в различ ных циклах реза имеет в процессе реза неодинаковый продольный ход дл одинаковых мерных длин ЕМ и положение оси реза меняется,то расстояние от будущей линии реза, ближайшей к дефектоскопу 2 по направлению движения трубной заготовки 1 до оси . дефектоскопа 2 в момент окончания реза различно в различных циклах реза. Однако неизменно расстояние А , рассчитанное относительно оси трубоотрезного устройства 4 в момен схода последнего с датчика 9 исходного положения, при включении на рез Число А подводится с помощью задатчика 22 чисел к первому входу сумматора 16 со знаком плюс. К второму входу сумматора 16 со зна ком минус подводится число, накёшливаемое счетчиком 23. Поскольку счетчик 23 начинает отсчитывать имлульсы датчика 7 перемещения труб . после включения триггера 24 или в момент схода трубоотрезного у,стройс ва 4 с датчика 9 исходного положени то к моменту окончания реза счетчик 23 накопит число, соответствующее перемещению Bj линии реза за время от. момента срабатывания датчика 9 до момента срабатывания датчика 8 р за. При срабат авании датчика 9 реза с выхода сумматора 16 в счетчик 12 вводитбя число AI , равное разности А, А-Е,, (О если число Cj- А , т.е. если число А, положительно. Число А, соответствует расстоянию будущей линии реза, ближайшей к дефектоскопу 2, до оси дефектоскопа 2 в момент окончания реза. Это число может быть различным в различных циклах реза, поскольку может быть различным ход ЕТ и таким образом учитывается изменениехода трубоотрезного устройства 4 в различных циклах реза. Число А, списывается в счетчик 12 импульсами датчика 7 перемещения труб и после обнуления счетчкка 12, что соответствует перемещению будущей линии реза на ось дефектоскопа 2, происходит выдача команда) на сдвиг информации в сдвигающем регистре 10. При срабатывании датчика 8 реза отключается триггер 24 и с задержкой во времени звеном 26 гасится счетчик 23. Если число А, в последующем цикле станет равным нулю до срабатывания датчика 8 реза, т.е. до процесса отрезания трубы 3, что соответствует перемещению будущей линии реза на ось дефектоскопа 2, до окончания реза, то с числового выхода сумматора 16 через нуль-орган 19, одновибратор 20, элемент И 21 и элемент ИЛИ 15 выдается команда на сдвиг регистра 10. Последний проходит через, элемент И 21, если имеется сигнал на инверсном выходе триггера 31, т.е. если триггер 31 отключен. Сигнал отключения триггера 31 проходит на его 1 -вход через элемент И 33 в каждом цикле реза от датчика 8 реза в том случае, если в момент окончания реза число А, на выходе . сумматора 16 положительно, либо равно нулю .(в последнем случае включен нуль-орган 19), т.е. если имеется сигнал на выходе элемента ИЛИ 32. Если в последующем цикле в момент окончания реза число А на выходе сумматора 16 станет отрицательным, т.е. А , то по. сигналу датчика 8.реэа в счетчик 12 с выхода сумматора 28. вводится число Aj , вычисляемое.сумматором 28 согласно выражениюA:i€ -,(Z) Здесь А, определяется выражением (1) и подводится к входу сумматора 28 с числового выхода сумматора 16, а Сд, подводится от задатчика 29 длины, Число АЗ так же, как и А, , соотв.етствует расстоянию будущей линии реза, ближайшей к дефектоскопу2, до оси дефектоскопа 2 в момент окончания реза, но в отличие от А, соответствует большему смещению оси реза относительно исходного положения трубоотрезного устройства 4, или большему ходу трубоотрезного устройства 4 в процессе реза. Одновременно с вводом в счетчик 12 числа A.J через элемент И 34 включается триггер 31 и накладывается запрет на прохождение с выхода сумматора 16 команд сдвига регистра 10 при переходе числа А, (числового выхода сумматора 16) через нуль. Поскольку этот момент может совпадать с обнулением счетчика 12 и подачей с его выхода команды на сдвиг регист ра 10, такая блокировка позволяет избегать ошибочных сдвигов регистров 10 и неправильной отбраковки тру 3 при разбегах во времени появления нулей выходных сигналов счетчика 12 и сумматора 16. Если в следующем цикле ход трубоотрезного устройства 4 в процессе реза уменьшится по сравнению с преды дущим циклом, т.е. if --Ет, так, что становится 6, А и число AI из. отрицательного становится положительным либо равным нулю, то в момент окончания реза от датчика 8 реза подается сигнал на отключение триггера 31, как это описано выше(Ег, и бу перемещение линий реза в предыдущем и последующем циклах от момента схода трубоотрезного устройства 4 с датчика 9 до момента срабатывания датчика 8 реза). При этом вновь разрешается прохождение команд на сдвиг регистра 10 от нуль-органа 19, если- в предыдущих циклах ход трубоотрезного устройства 4 .вновь увеличится, Et,j ST/ так, что число AI начнет переходить через нуль в сторону отрицательных величин. Затем цикл работы системы повторяется. Таким образом, благодаря дополнению системы звеньями, измеряющими изменяющееся перемещение трубной заготовки при ходе трубоотрезного устройства из фиксированного положения до окончания реза и фиксирующими в момент окончания реза переменное положение линии.реза относительно дефектоскопа, .исключаются.неточности в сопровождении дефектов труб заготовки и обеспечивается качественная отбраковка труб. Применение предлагаемой системы позволит сократить численность эксплуатационного персонала, так как отпадает необходимость в дополнительном контроле труб и их пересортировке. Уменьшение при этом эксплуатационных расходов составит около 24000 руб. в год.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для автоматической отбраковки труб | 1982 |
|
SU1088830A1 |
| Способ изготовления наружных обшивок для кровельных панелей с утеплителем и устройство для его осуществления | 1990 |
|
SU1784418A1 |
| Устройство для раскроя заготовок и сортировки мерных изделий | 1977 |
|
SU742056A1 |
| Линия для непрерывного изготовления гофрированных полос | 1987 |
|
SU1496854A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Устройство для автоматической разбраковки листов | 1978 |
|
SU753509A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Цифровой фильтр | 1988 |
|
SU1569957A1 |
| Ультразвуковой эхо-импульсный дефектоскоп | 1988 |
|
SU1587437A1 |
| Устройство для поворота вектора | 1982 |
|
SU1076910A1 |
СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ ОТБРАКОВКИ ТРУБ, содержащая дефектоскоп, датчик перемещения труб, трубоотрезное устройство с датчиком реза и датчиком исходного положения,сдвигающий регистр, первый счетчик, соедине1 ный с датчиком перемещения труб, коммутатор, через который дефектоскоп соединен со сдвигающим регистром, сбрасыватель дефектных труб с блоком управления, отличающ ая с я тем, что, с целью повышения качества отбракованных труб при переменном продольном ходе трубоотрезного устройства в различных циклах реза, она дополнительно содержит второй счетчик, два задатчика длины, два сумматора, два триггера, шесть t элементов И, три одновибратора. Два нуль-органа, три элемента ИЛИ. и звено задержки, причем первый вход второго счетчика соединен с датчиком перемещения труб, первые входы сумматоров - соответственно с первым и вторым задатчиками длины., вторые входы первого сумматора - с выходом второго счетчика, а вторые входы второго сумматора - с числовым выхо дом первого сумматора, числовой и первый знаковый выходы первого сумматора соединены с вторым входом первого счетчика через первые элемен ты И и ИЛИ, выход второго элемента И соединен с вторым входом первого элемента ИЛИ, первый вход второго элемента И соединен с выходом второго сумматора, а второй вход - с вторым знаковым выходом первого сумматора, выход первого триггера .соединен с вторым входом второго.счетчика, а третий вход первого счетчика - с датчиком реза, выход первого счетчика соединен через первый нульорган, первый одновибратор и второй i элемент ИЛИ с вторым входом сдвигающего регистра, при этом второй вы(Л ход первого нуль-органа соединен с четвертым входом первого счетчика, числовой выход первого сумматора соединен через второй нуль-орган, второй одновибратор и третий элемент. И с вторым входом второго элемента ИЛИ, первый знаковый выход первого сумматора и выход второго нуль-органа соединены через третий элемент ИЛИ, четвертый элемент И и второй триггер с вторым входом третьего элемента И, выход пятого элемента И со о соединен с вторым входом второго триггера,первый вход пятого элемента) И - с вторым знаковым выходом первого 00 сумматора,а его второй вход и второй вход четвертого элемента И,а также первый вход первого триггера соединены с датчиком реза, датчик исходного положения трубоотрезного устройства соединен через третий одновибратор с вторым входом первого триггера, датчик реза через звено задержки - с третьим входом второго счётчика, кроме того, датчик реза и выход сдвигающего регистра соединен с блоком управления сбрасывателем дефектных труб через шестой элемент И.
f If
щ г
аГ1 r.-j
| l.KapeeB М.Ф | |||
| и др | |||
| Системы автоматической сортировки листов на агрегатах поперечной резки | |||
| Металлургическое оборудование (НИИИИН ФОРМТЯЖМАШ), 1978, 34, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ нагрева эквипотенциального катода в электронных вакуумных реле | 1921 |
|
SU266A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и др | |||
| Системы автоматической сортировки на агрегатах поперечной резки, Металлургическое оборудование, 1978, 34, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
