ИзоГ)Нте11И1, )тн(сит1,я к ii();ii,oMfi(i-Tp;iiiciiopTiioi Ч и11ке и может оьпч. uciio.и.зонапо, naiii), и .lociioii njxnn.iiii.KMiiiocTii л.ля norpyiiKii AcpCHbcii и ooiiaiU KiooMcro обо рудонаиия 11()1ру: П1 K(iH-iii ia6i.-.iCpoii и ijipoiiталыгь1 iiorpy;i4HK()B или д;1я ва.пки и :акетироваиия деровьеи, ocyiHOcrii.ivRMiiix IKKIOMиол1акоти)у K)iiLHN ii машинами, а также с другими видами |:)аГ)()чего оборудования коиающим и ио1-р зоч1И)1м ковиюм -jKrKaBaioра для |))отки сня;5иы.ч груитон, ислрузки nacbiiiHoio 11 дробленого материалов и,1и с I5a6o4eii илощадкси для ироизводс1ва строите,1ьи1 1х 1 монюжиых работ.
Нзнестеи маиниулятор, установ кмиилй. например, на подвижном шасси и содержащий юворотную )аму. стойку, закренленную на ней стрелу. на койне которой установлен многознени1)1Й 1нариири1 1Й мехаииз.м неременкння. исполнительной рукоятн, 11р1и«)ДВ1 неремешення стрелi i н иснолпительной рукояти, вып().тненив1е в виде телеск()нич(ч-ких гид1)оприводов j 1 I.
Недостатками из1(естпого )йства являкггся малая зоиа обслуживания и Heii()3можпость его н|П1менения на укладке в высокий нг1абе;11.
Lle.TBio изобретения яв.пяетси )аси1нренне ЗОНВ1 обелуживання.
LIc.Ti, достп а(тся тг-м, нто манииулятор. установ.тенный на иодвнжном И1асси и co;icpжашип iioiiopoTiiyio ;)аму, стойку, закрсмгтенную на пей стрелу, на конце кото)()й установлен лнк)1Ч)звениый 1на)нн|М1ый механизм ие)еме1цения исно.тннте.(й , а также нрнЕзоды иеремеигепия стрслв п :)той рукоятн, выполненные в виде телссконическн.х гидроприводов, снабжен дополнптельным чм ее коническим гидроприводом перемещения ис 1олните.т1.но1 рукояти, усгаповлеиным на одном из рычагов мно озвенно1() Н1арни)ного меха Н13м;, нричем ноеледний П1арни)н() закрен.теп на Koinie етрелы н выпо.тнен в lUiде механиз.ма Чебьпнева. а указаншл pbinai связан те.тесконическнм гпдронриволл)м иеремен1еиия рукояти со етойкоИ
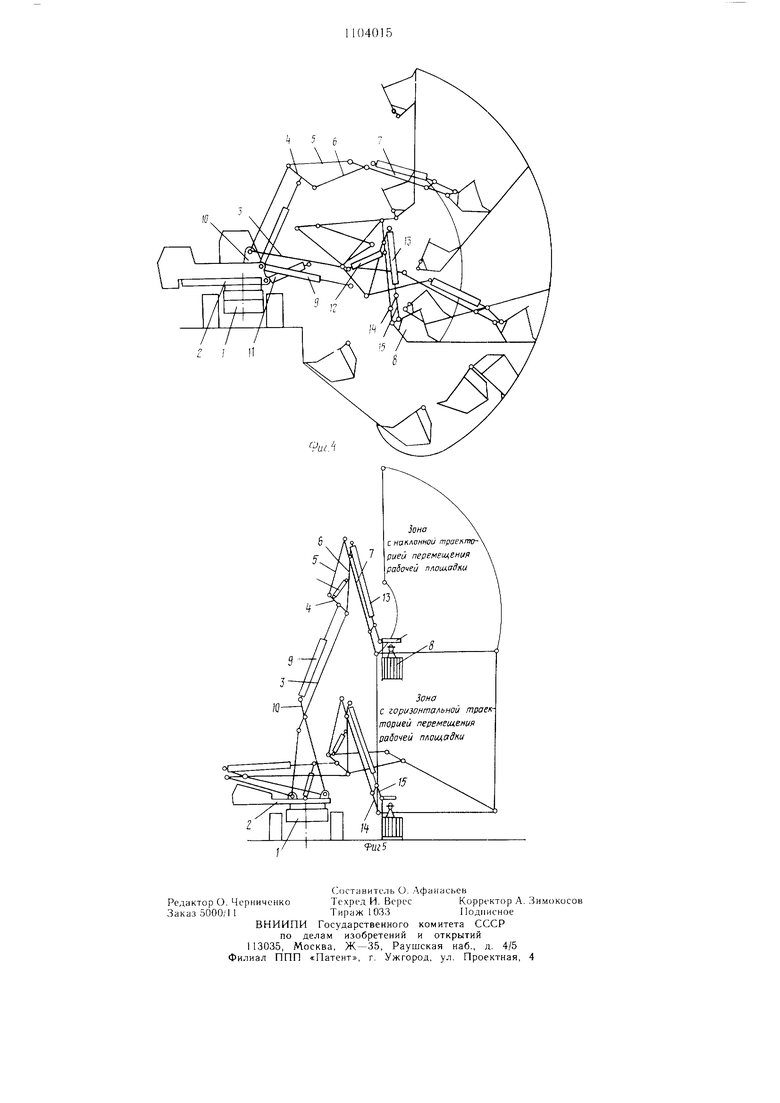
На (|)иг. 1 изображепа кнпематпческая схема иогрузочио1ч мапи 1уля1Ч)1а, используемая д. 11()Л)узчика лптабе:1сра; па фиг. 2то же. с захшггпо-срезаюнгим механизмом, исио.тьзуемая li ва.точно-иакетируюихе машипе; па фш. 3 то же. с вн.точпьгм захватом д.тя пачки )ев н.чн погрузочным ковшом, используемая но срропта,Н)Ных ногрузчиках; па фиг. 4 - то же. е KOIMIIOM для ногрузкп наеьнни)1Ч) н )б.тепого материа.тов и разработки связных г)унтов нрямой п об)атпой лонатамн; на cj)Hr. Г) то же, с рабочей 1гтон1адкой д.тя производства строите.тьиых и монтажиь1х работ.
.V aiHni лятч)) состоит из 1одвнжпо|4) шасси 1 и установ.1енной на нем noBopoTnoii jKiмы 2, соч.тенспнои со стрелой 3. На коппе стре,1ы шарпирпо укреи.тен 4. иа коОГОМ с помощью НО ВО pOTf 11)ГХ 5 и 6
с I anoiiieiia нспо.тпите.тьпая ;)укоять 7. Рычаг 4. новоротпые тя1Л1 5 и ti и исио,1иительная )укоят|, 7 образуют мехаппзм Чебышева с нрямол п.пейным нс)смешепием точкн крепления рабочего органа 8. С, помощью телеcKOiHT-ieeKoi о гпдроп)ивода 9 псремешенпя пс110лпите.Н)НОЙ )ук()яти 7 р1)1чаг 4 связан со стойкой И). Ун|)ап:1еине етре.той , и рукоятью 7 осун1ест-15ляется гпд)ои11линдрами 11
0 н 12. Допо.чп1Г ельпый гндроцп.типдр 12 укреи.теи па рычаге 4. Поворот рабочего оргапа 8 в ве- 1тпка.нд1ОЙ |,тоскоетч1 осуп1,ествляется механнзмом, еостояшпм нз гидронилиндра 13, рыча1а 14, HiapHHpiio укрен,ле11ного на
5 рукоятн 7, и тяги 15, СВОбоД1Н)1М КСПЩОМ СВЯзаппой с корпусом раб()че1о оргапа 8 или с pi,i4aiOM нод1И1жно ч) унора 16. которВ1Й в.запмодейетвует с упорном 17. установленным на раб(.)чем органе 8.
В и)ед,тагаемом 1О1рузочном мапннуля0торе могут- быть пспользованы всевозможпые виды рабочпх органов, например иовоpoTHbiit в горпзоитальиой и ве)тикальпой нлоскостн 1чь-1равлический челюстной захват для 101рузкн д.тппно.мерных изделий, например 5 бревсп ((()И1. 1), захва1Ч1о-ереза1Оии1Й мехаиизм д;1я ва,тки и иакетировки деревьев (ij)nr. 3) и.тн погру.зочн|)1Й ковш для по|-)Пзкн iiacbHiHoio пли д)об.тепого матерпа,/ioii (()иг. 4 1.
01-сли па коиие рукояти 7 повесить рабочую н.тонщдку, предлагаемый манипулятор может бьгг, ис11о.Т1 зован как иодт емник д.тя н р он 3 во дет в а стронтч тьно-м(Л1тажиых работ ((jinr. 5).
)йстЕ) аботает еледуюншм обра зом.
В зависимости от ха)актера В1 1иолняемь1х работ ycTaHiJikiHBaiOT подвижное шасси I в но.тожепие. ii|)n котором удобно выполпятЧ) Т5)ебуемые опсрапип (погрузочно-раз0 г)узочи1 е, на;ючно-накетл1ру он1ие, етроительи()-мо11тажпые).
Нутем разЕюрота новоротной рамы 2 совмеиииот плоскость действия рабочеЕЧ) оборудоваипя с требуемой зоной обслуживания. Манипуляцпями стрелы 3 уетапавлшшют рабочпй оргап 8 иа уровепь В1,1нолняемых операций, например, захвата бревен, сииливания дерева, зачер и 1ва1 ия пачки бревен или сьн1учего материа.та. Уиравляя телеекоипческнм гидроприводом 9, устанавливают необхоQ днмый наклон Т|)аектор11и неремещепия рабг)чсчо оргапа 8.
Например, для выиолненпя ногрузочпораз|-рузочных онераннй устанавливают нренмушеетвеппо 1()рпзопта.ты1ое перемешенпе че.иостно ч) захвата, а когда необходимо
5 с11НбатТ) материа.т. храпяшийся в откосах,
с НОМОШЫО ПОГЕПЗОЧНОГО KOBHja Н.ТИ ВИЛОЧно|ч .iaxiiaTa хчтанав.тпвают пак,тонпую Т|)аекторию. п,а)ал.тел1)Пу10 откосу. Дгктее поворотом рукояти 7 перемещают рабочий орган к месту выполнения операций - захват бревна, спиливание дерева, зачерпывание насыпного материала из штабеля и т.д. Рабочую площадку строительного подъемника перемещают к месту посадки монтажника и загрузки инструментов и материалов. После захвата или зачерпывания груза, спиливания дерева или посадки монтажника в рабочую площадку манипуляция.ми стрелы 3 и рукояти 7, разворотом поворотной рамы 2 осуществляют подачу груза к месту разгрузки, а рабочей площадки - в 30HV производства монтажных работ.
Благодаря применению в предлагаемом манипуляторе рычага 4, П1арнирно установленного на конце стрелы 3 с возможностью поворота за счет действия гидроприводов 9 и 12, и двух поворотных тяг 5 и 6, связанных с рукоятью 7, значительно увеличивается зона обслуживания.
Предлагаемый манипулятор позволяет реализовать четыре программы перемещений рабочего органа: ступенчато-кривоц1ипную, прямолинейно-вертикальную, прямолинейно-горизонтальную и прямолинейно-наклонную, что повыщает эффективность манипулятора при выполнении многих видов работ.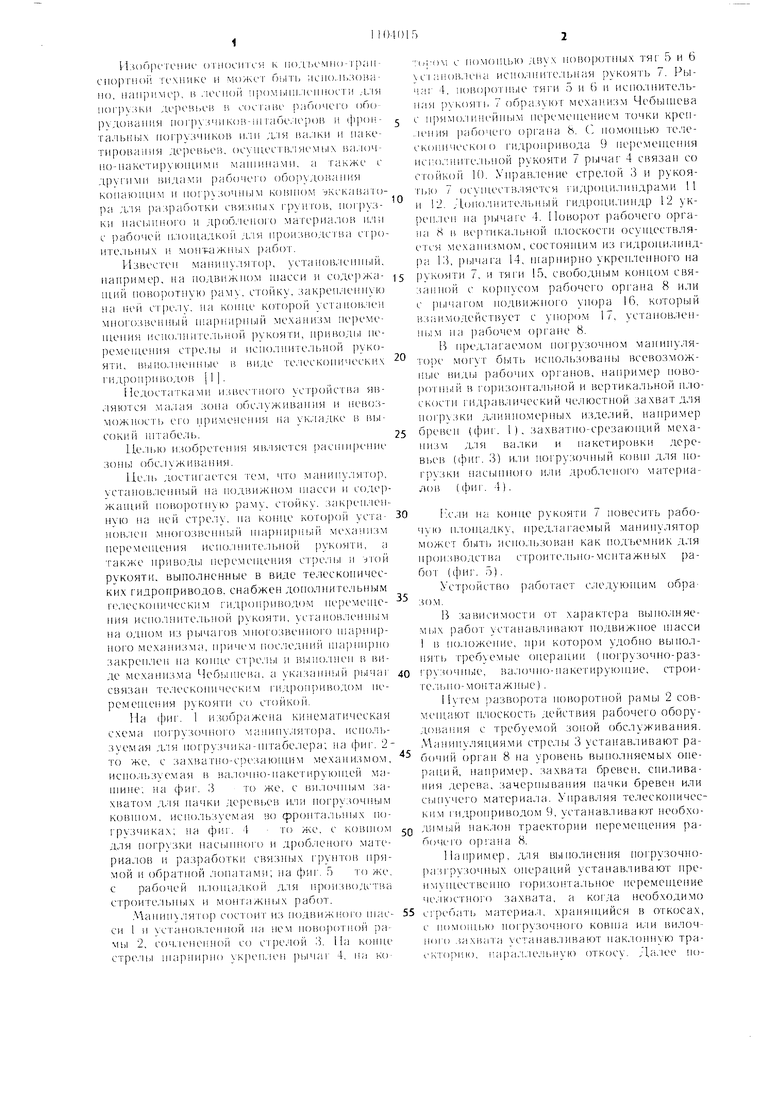

| название | год | авторы | номер документа |
|---|---|---|---|
| Лесозаготовительная машина | 1987 |
|
SU1442134A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Лесозаготовительная машина | 1988 |
|
SU1542484A1 |
| Комбинированный агрегат биомелиорации земель с переработкой лесокустарника для утилизации щепы, древесной золы и подсева семян | 2020 |
|
RU2740173C1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| ЛЕСНАЯ МАШИНА | 2013 |
|
RU2535162C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2116025C1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| Гидропривод лесозаготовительной машины | 1979 |
|
SU957796A1 |
МАНИПУЛЯТОР, установленный на подвижном шасси и содержащий поворотную раму, стойку, закрепленную на ней стрелу, на конце которой установлен многозвенный шарнирный механизм перемещения исполнительной рукояти, приводы перемещения стрелы и исполнительной рукояти, выполненные в виде телескопических гидроприводов, отличающийся тем, что, с целью расширения зоны обслуживания, он снабжен дополнительным телескопическим гидроприводом перемещения исполнительной рукояти, установленным на одно.м из рычагов многозвенного шарнирного механизма, причем последний шарнирно закреплен на конце стрелы и выполнен в виде механизма Чебышева, а указанный рычаг многозвенного шарнирного механизма связан телескопическим гидроприводом перемещения рукояти со стойкой. (Л о ел
Z Ю
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1980 |
|
SU897495A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
