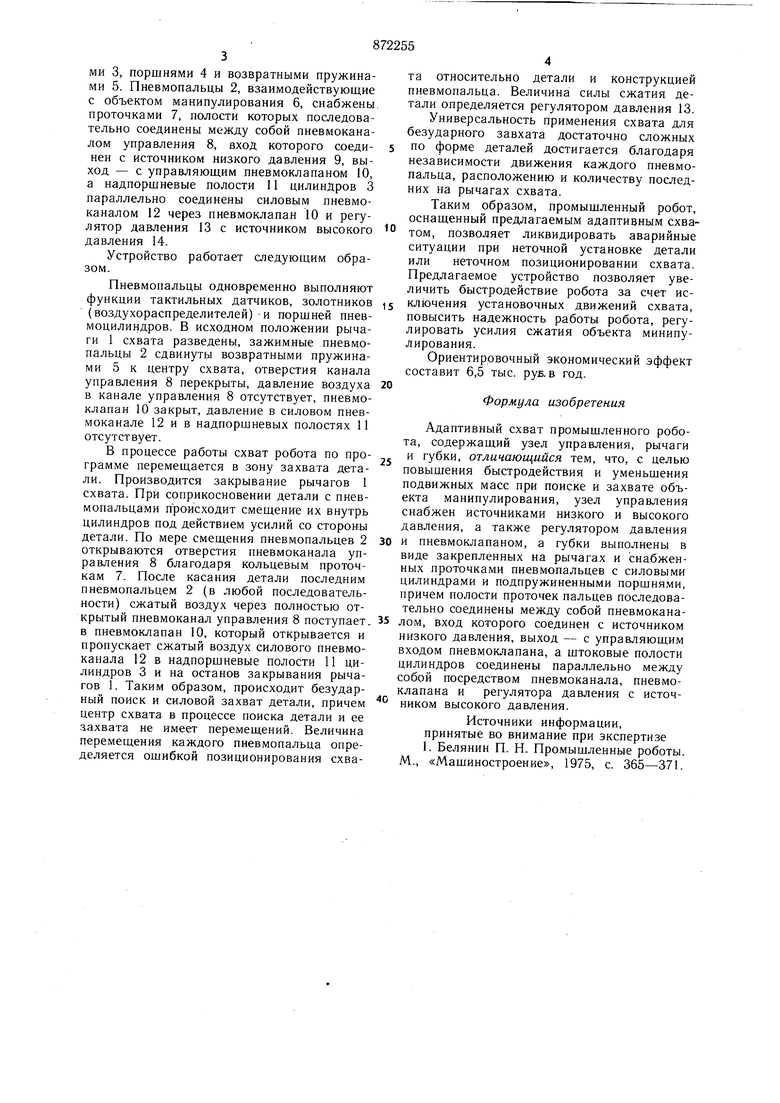
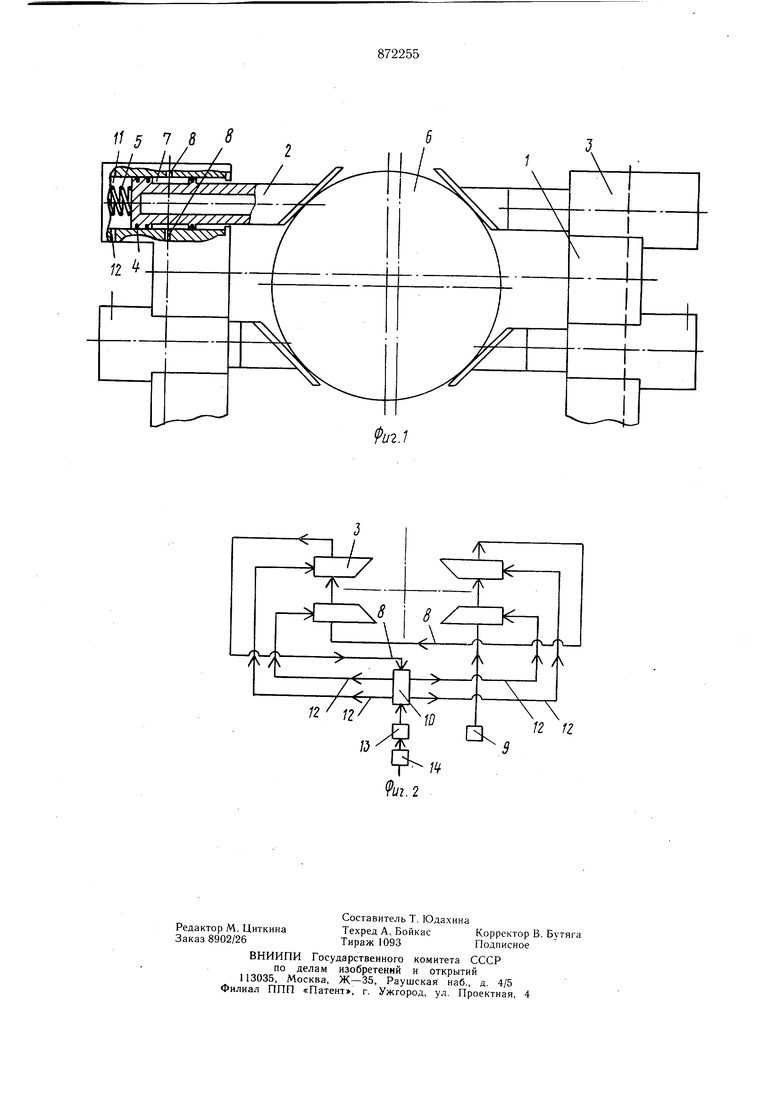
(54) АДАПТИВНЫЙ СХВАТ ПРОМЫШЛЕННОГО РОБОТА Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов. Известна конструкция адаптивного робота, содержащая руку, на конце которой установлен схват с оснащенными тактильными датчиками губками, связанными с корпусом захвата шарнирно-рычажными механизмами, и приводы перемещений 1. Недостатком этой конструкции является наличие больших подвижных масс, что приводит к ухудшению быстродействия и ди: намических характеристик устройства и требует применения достаточно мощных приводов. Цель изобретения - повышение быстродействия, увеличение надежности работы робота. Указанная цель достигается тем, что на рычагах схвата установлены губки в виде закрепленных на рычагах пневмопальцев с цилиндрами и подпружиненными поршнями, взаимодействующих с объектом манипулирования и снабженных проточками, полости которых последовательно соединены между собой пневмоканалом управления, вход пневмоканала управления соединен с источником низкого давления, а выход - с управляющим входом пневмоклапана, надпоршневые полости цилиндров параллельно соединены силовым пневмоканалом через пневмоклапан и регулятор давления с источником высокого давления. Повышение быстродействия обусловлено тем, что в процессе поиска и захвата детали центр схвата находится в неподвижном положении, что исключает необходимость в установочных движениях схвата относительно центра детали, значительно снижает инерционность подвижных масс. Надежность работы робота при неточной установке детали или неточном позиционировании схвата повышается тем, что в процессе поиска и захвата детали происходит безударное взаимодействие детали с каждым подпружиненным пневмопальцем, действующим независимо, что позволяет ликвидировать аварийные ситуации. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - принципиальная схема устройства. Адаптивный схват содержит рычаги 1 и губки, выполненные в виде закрепленных на рычагах 1 пневмопальцев 2 с цилиндрами 3, поршнями 4 и возвратными пружинами 5. Пневмопальцы 2, взаимодействующие с объектом манипулирования 6, снабжены проточками 7, полости которых последовательно соединены между собой пневмоканалом управления 8, вход которого соединен с источником низкого давления 9, выход - с управляющим пневмоклапаном 10, а надпорщневые полости 11 цилиндров 3 параллельно соединены силовым пневмоканалом 12 через пневмоклапан 10 и регулятор давления 13 с источником высокого давления 14.
Устройство работает следующим образом.
Пневмопальцы одновременно выполняют функции тактильных датчиков, золотников 5 (воздухораспределителей) -и порщней пневмоцилиндров. В исходном положении рычаги 1 схвата разведены, зажимные пневмопальцы 2 сдвинуты возвратными пружинами 5 к центру схвата, отверстия канала управления 8 перекрыты, давление воздуха 20 в канале управления 8 отсутствует, пневмоклапан 10 закрыт, давление в силовом пневмоканале 12 и в надпоршневых полостях 11 отсутствует. В процессе работы схват робота по программе перемещается в зону захвата детали. Производится закрывание рычагов 1 схвата. При соприкосновении детали с пневмопальцами происходит смещение их внутрь цилиндров под действием усилий со стороны детали. По мере смещения пневмопальцев 2 зо открываются отверстия пневмоканала управления 8 благодаря кольцевым проточкам 7. После касания детали последним пневмопальцем 2 (в любой последовательности) сжатый воздух через полностью открытый пневмоканал управления 8 поступает. 35 в пневмоклапан 10, который открывается и пропускает сжатый воздух силового пневмоканала 12 в надпорщневые полости 11 цилиндров 3 и на останов закрывания рычагов 1. Таким образом, происходит безударный поиск и силовой захват детали, причем
центр схвата в процессе поиска детали и ее захвата не имеет перемещений. Величина перемещения каждого пневмопальца определяется ощибкой позиционирования схвата относительно детали и конструкцией пневмопальца. Величина силы сжатия детали определяется регулятором давления 13.
Универсальность применения схвата для безударного завхата достаточно сложных по форме деталей достигается благодаря независимости движения каждого пневмопальца, расположению и количеству последних на рычагах схвата.
Таким образом, промышленный робот, оснащенный предлагаемым адаптивным схватом, позволяет ликвидировать аварийные ситуации при неточной установке детали или неточном позиционировании схвата. Предлагаемое устройство позволяет увеличить быстродействие робота за счет исИсточники информации, принятые во внимание при эксперти.зе 1. Белянин П. Н. Промыщленные роботы. М., «Машиностроение, 1975, с. 365-371. ключения установочных движений схвата, повысить надежность работы робота, регулировать усилия сжатия объекта минипулирования. Ориентировочный экономический эффект составит 6,5 тыс. рув. в год. Формула изобретения Адаптивный схват промышленного робота, содержащий узел управления, рычаги и губки, отличающийся тем, что, с целью повышения быстродействия и уменьщения подвижных масс при поиске и захвате объекта манипулирования, узел упраау1ения снабжен источниками низкого и высокого давления, а также регулятором давления и пневмоклапаном, а губки выполнены в виде закрепленных на рычагах и снабженных проточками пневмопальцев с силовыми цилиндрами и подпружиненными поршнями, причем полости проточек пальцев последовательно соединены между собой пневмоканалом, вход которого соединен с источником низкого давления, выход - с управляющим входом пневмоклапана, а щтоковые полости цилиндров соединены параллельно между собой посредством пневмоканала, пневмоклапана и регулятора давления с неточником высокого давления.
11 5 7 и / / /I/ /
Ч.Ч /чУчччч Хч /
t . . J . rvTjTj. j /
r.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Захват вакуумный | 1982 |
|
SU1016157A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Автоматизированная оросительная система | 1983 |
|
SU1162383A1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Схват промышленного робота | 1988 |
|
SU1516347A1 |
| Устройство для управления адаптивным роботом | 1978 |
|
SU723509A1 |
U2.2
