Предлагаемое изобретение относится к области машиностроения, к захватывающим устройствам промышленных роботов и манипуляторов, точнее к адаптивным схватам, предназначенным для роботизированных работ по перемещению объектов, и может быть использовано в механосборочном производстве.
Известен адаптивный схват сборочного робота (Полезная модель номер патента: RU 163326 U1, Дата публикации 10.07.2016), содержащий подвижные направляющие с захватными пальцами, где пассивная адаптация обеспечивается благодаря системе вертикально и горизонтально действующих пружин. Сведение и разведение зажимных губок обеспечивается пневмоцилиндром двухстороннего действия, у которого штоки жестко связаны с зажимными губками.
Однако недостатком данной конструкции является невозможность обеспечения постоянного усилия захвата грузов, имеющих разные габариты по ширине захвата из-за отличия в силе сжатия пружин.
Кроме того, известен схват промышленного робота (Номер свидетельства: SU 1315307, Дата публикации: 07.06.1987), в котором перед захватом детали винтами перемещают пластины до установления необходимой силы захвата. При подаче рабочей жидкости к приводам губки начинают сходиться и при достижении заданного усилия подача рабочей жидкости к приводам прекращается. Освобождение захвата происходит при выключении насосной станции.
Однако недостатком конструкции является низкий КПД конструкции из-за применения гидропривода, а также необходимость наличия внешнего источника энергии в виде гидравлической насосной станции.
В качестве прототипа принят схват промышленного робота (Номер свидетельства: SU 1224138 A1, Дата публикации: 15.04.1986), содержащий установленные на корпусе рычаги с губками и привод перемещения рычагов, выполненный в виде соленоида, закрепленного на корпусе, и двух якорей, связанных рычагами, при этом, с целью повышения надежности работы схвата за счет выравнивания усилия сжатия губок при захвате различных по габаритам объектов, он снабжен двумя реостатами, неподвижная часть каждого из которых установлена на губке, а подвижная часть жестко связана с соответствующим рычагом, при этом губки установлены с возможностью перемещения и подпружинены относительно рычагов, а по крайней мере один из реостатов включен последовательно с соленоидом.
Недостатком схвата является то, что при разных габаритах захватываемого груза по ширине губки будут прижимать груз с разным усилием, что может привести к ненадежному захвату груза.
Задачей (техническим результатом) заявляемого устройства является повышение надежности работы схвата за счет обеспечения постоянного усилия сжатия губок при захвате различных по габаритам объектов.
Поставленная задача достигается тем, что в схват промышленного робота, содержащий рычаги, губки, подпружиненные пружинами сжатия, введены в каждом рычаге два ползуна, имеющих возможность перемещаться по прямой, присоединенные к ним пружины сжатия и стержни, соединяющие шарнирно ползуны с губками. Привод перемещения рычагов, выполнен в виде пневмоцилиндра.
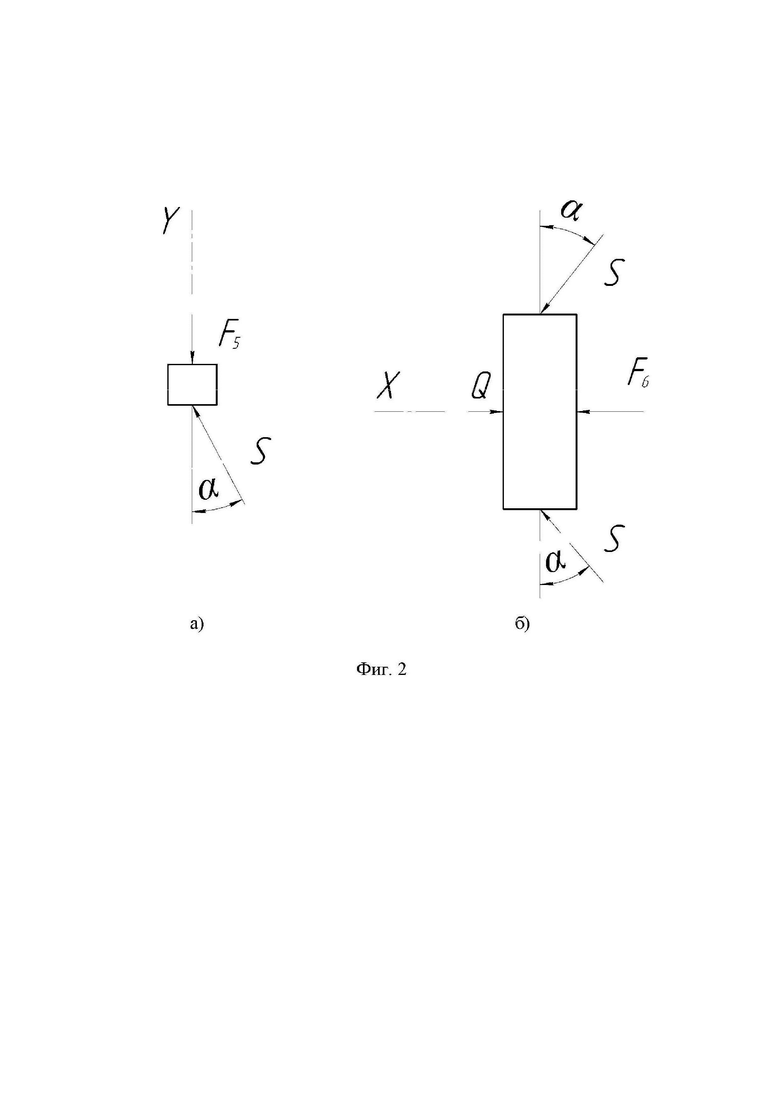
На Фиг. 1, а и Фиг. 1, б приведены принципиальны схемы предлагаемого устройства при захвате грузов разной ширины. На Фиг. 2, а и Фиг. 2, б приведены схемы сил, действующих на ползун и на губку соответственно.
Предлагаемое устройство (Фиг. 1) содержит пневмоцилиндр 1, предназначенный для перемещения рычагов 2, на каждом рычаге имеется два ползуна 4, имеющих возможность перемещаться по прямой, присоединенные к ним пружины сжатия 5, губки 3, подпружиненные пружиной 6, два стержня 7, соединяющие шарнирно ползуны 4 с губкой 3.
Устройство работает следующим образом. При подаче сжатого воздуха в пневмоцилиндр 1 рычаги 2 сдвигаются друг к другу и губки 3 захватывают объект (Фиг 1, а), при этом упругая система, состоящая из пружин 5 и 6 сжимаются, обеспечивая постоянное усилие прижатия губок 3 к объекту, независимо от его ширины (Фиг. 1, б).
Покажем при каком соотношении жесткостей пружин сила давления между объектом и губкой будет постоянной при различных габаритов объектов и равна 
 .
.
Рассмотрим отдельно ползун 4 (Фиг. 1 а) и запишем условие его равновесия в проекции на ось OY (Фиг. 2 а):

где F5 – усилие пружины 5,
 ,
,
 - жесткость пружины 5,
- жесткость пружины 5,
 длина стержня 7,
длина стержня 7,
 реакция стержня 7,
реакция стержня 7,
 - угол наклона стержня 7 к оси Y.
- угол наклона стержня 7 к оси Y.
Запишем условие равновесия губки 3 (Фиг. 2, б) в проекции на ось X:
 (2)
(2)
где
F6 – усилие пружины 6,
 ,
,

 - сила, с которой объект давит на губку.
- сила, с которой объект давит на губку.
Выражая из (1) реакцию стержня  , учитывая, что
, учитывая, что  ,
,  и подставляя в (2), получим:
и подставляя в (2), получим:
 (3)
(3)
Из выражения (3) видно, что при  =0 и
=0 и  сила давления объекта на губку будет постоянной при перемещении губки и равна
сила давления объекта на губку будет постоянной при перемещении губки и равна .
.
Таким образом, для того, чтобы усилие между объектом и губкой было постоянным и равным при изменении габаритов объектов, необходимо выполнение двух условий:
 =0 и
=0 и .
.
Техническим результатом является обеспечение постоянного усилия между объектом и губкой, повышение надежности работы схвата промышленного робота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| Схват | 1981 |
|
SU960007A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1984 |
|
SU1224138A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |
| Очувствленный схват промышленного робота | 1984 |
|
SU1180263A1 |
Изобретение относится к области машиностроения, к захватывающим устройствам промышленных роботов и манипуляторов, точнее к адаптивным схватам, предназначенным для роботизированных работ по перемещению объектов, и может быть использовано в механосборочном производстве. Схват промышленного робота содержит рычаги, привод перемещения рычагов, выполненный в виде пневмоцилиндра, губки, подпружиненные пружиной сжатия, два ползуна, имеющие возможность перемещаться по прямой, присоединенные к ним пружины сжатия и стержни, соединяющие шарнирно ползуны с губками. Сведение и разведение губок обеспечивается пневмоцилиндром двухстороннего действия. Повышается надежность работы схвата за счет обеспечения постоянного усилия прижатия губок независимо от размеров объекта. 2 ил.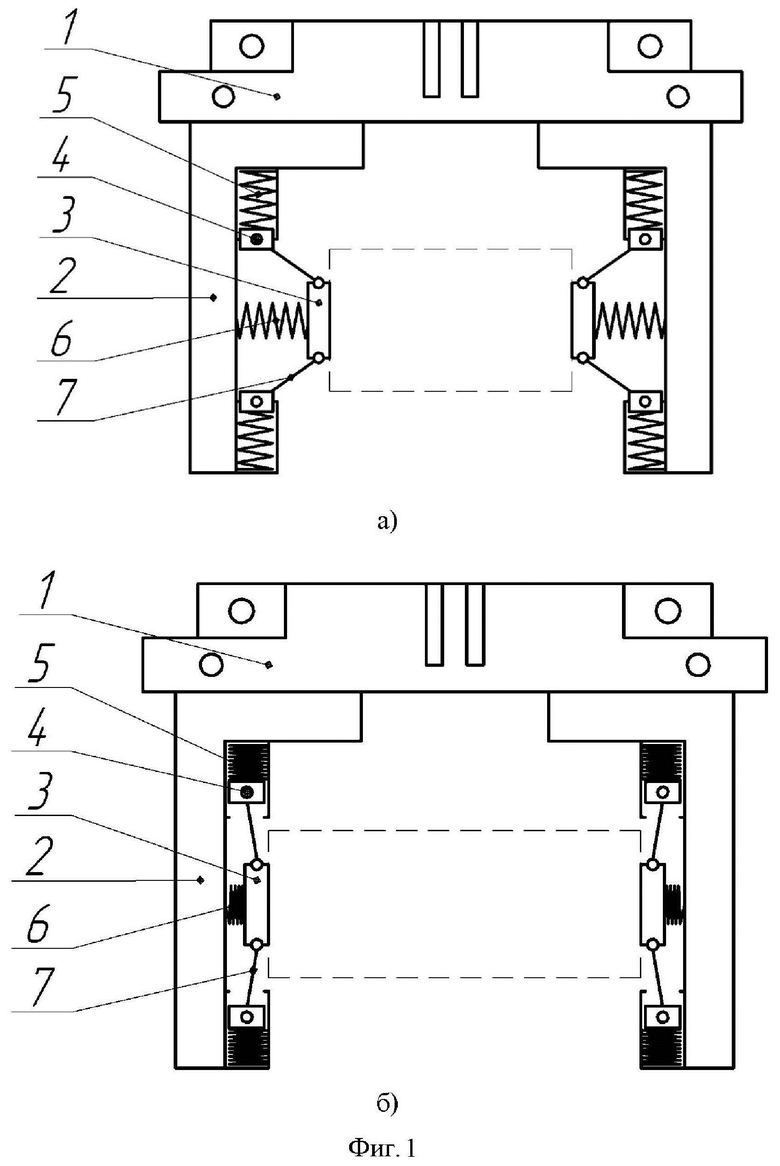
Схват промышленного робота, содержащий рычаги, губки, подпружиненные пружинами сжатия, отличающийся тем, что в каждый рычаг схвата введены два ползуна, имеющие возможность перемещаться по прямой, присоединенные к ним пружины сжатия и стержни, соединяющие шарнирно ползуны с губками, причем привод перемещения рычагов выполнен в виде пневмоцилиндра.
| Схват промышленного робота | 1984 |
|
SU1224138A1 |
| Предохранительный щиток для электросварщиков | 1940 |
|
SU58975A1 |
| Захватное устройство | 1990 |
|
SU1771955A1 |
| СРЕДСТВА, СТИМУЛИРУЮЩИЕ РЕГЕНЕРАЦИЮ ТКАНЕЙ | 2013 |
|
RU2599289C2 |
| JP 2008093823 A, 24.04.2008. | |||

