Изобретение относится к мап1И(ос-троению и может быть использовано R манипуляторах с регулируемым усн;1ием захвата объектов.
Известен охват промышленного робота, содержап1ий губки с приводом их псреме.щенг:я, каждая из которых снабжена датчиком усилия сжатия, с чувс -вите;1ьпьгч ;icментом из э; ектропроводяьче 0 .чластомс)а, связанным с системой подачи и регулирования давления рабочей средыГ::7.
Однако известное устройство lic 1г;)зволяет определить форму захватывающего предмета, зажатого между губками схвата, величину его проскальзывания между i-убками захвата и вес. Вес это ограничивае фупкциональпые возможности известного усгройства.
Целью изобретеь:ия является рас пирение технологических возможностей схвата промышленного робота путем определения формы захватываемого предмета, величины его проскальзывания и веса.
Поставленная ne.ib достигается тем, что в схвате промьнлленного робота, содержащем губки с приводом их перемегнения, каждая из которых снабжена датчиком усилия сжатия с чувствительным элементом из электропроводящего эластомера, связанным с системой подачи и регулирования давления рабочей среды, каждая губка снабжена дополнительными датчгками усилия сжатия, а основной датчик содержит по.осы из элсктропповодящего материала, чувствите.и 1н-лй элемент его вынолнеп а киде пластины с па рал дельным и отверстиями, расположенными в двух взаимно перпендик мяг)н,;х илоск; стях, при этом полосы рас 1оложен) лара; .чельно собой на протнвопол 1;кныл гранлх н:1астины, ojina ii.i кскорых рабочей в промежутках между 1росчииями отверстий на Ipaii, н.пастинь и 1 ол;к:ь одной рани нернен;).ику.; яр1.л нс-;и)сам . а допо.1нительные дат:- пки си.;;ия расположе 1ы на свободных |-пя}1Ях нластины и каждый из ннх в идс iibicTvпов на чувствительном - лел:е Г е и электр(;доя. изолировапг ых от губки и расчоложе ных :.ижруг основания яыс1 vr;; ,- iia е;-; }U :iшине.
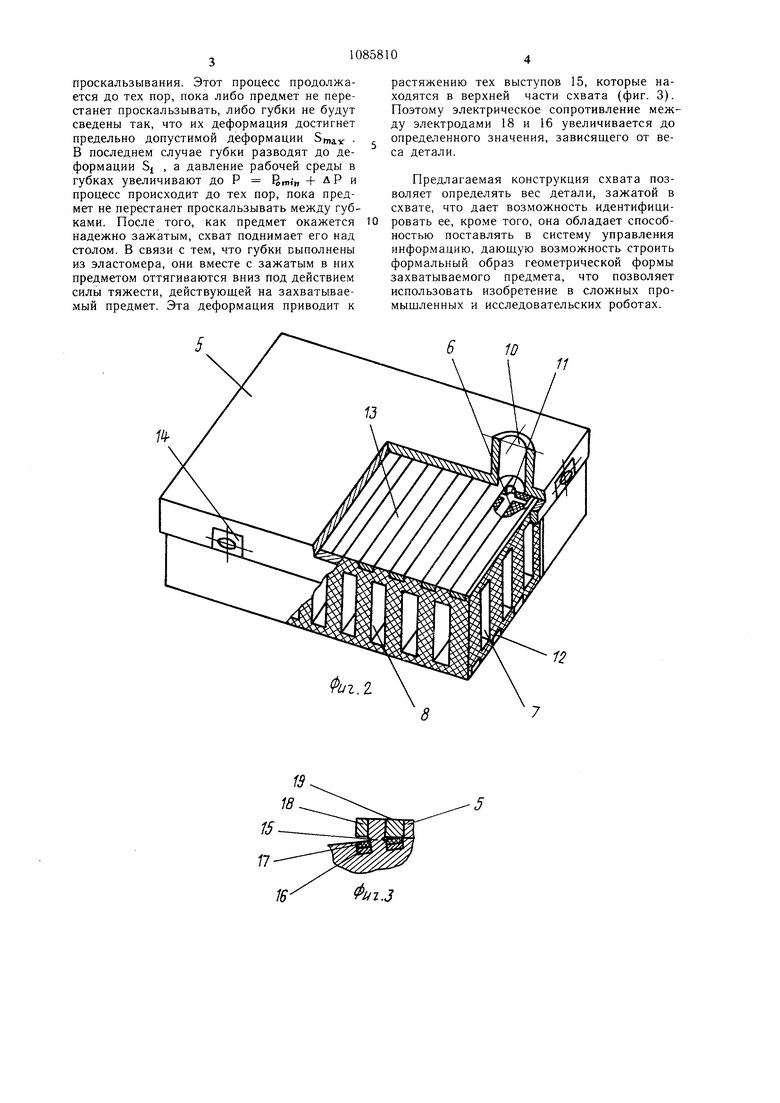
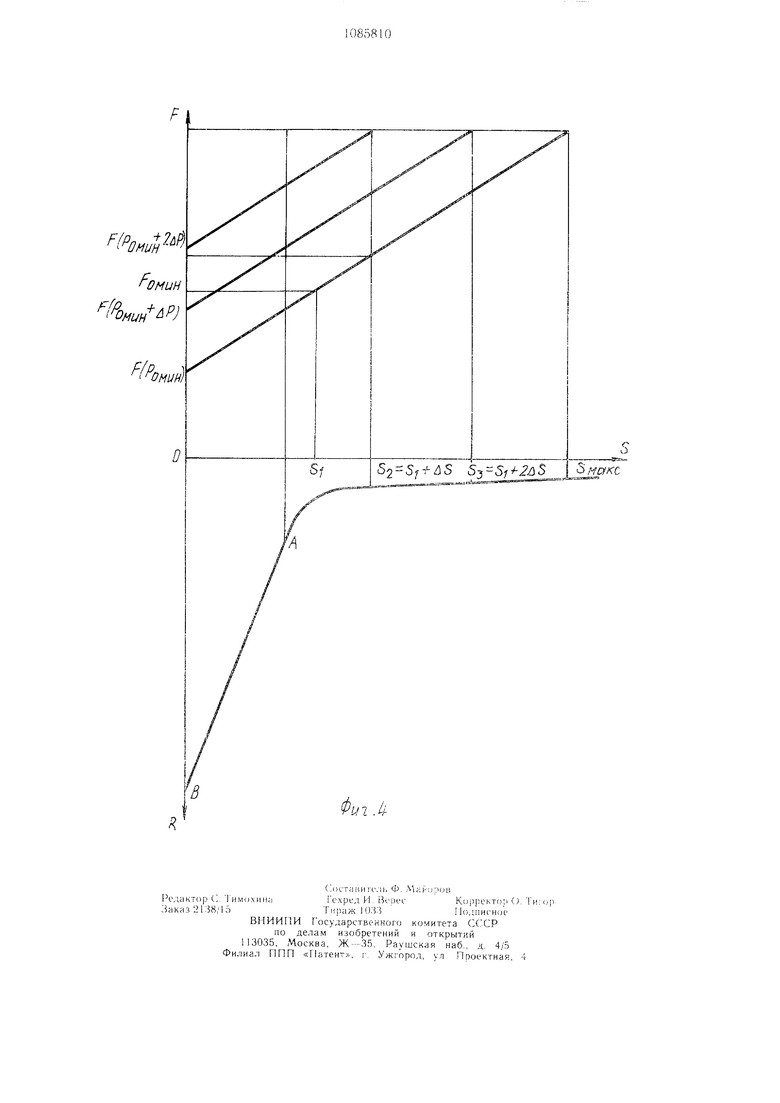
На фиг. 1 схематически показа ; схва промышленнО1о робота.. обн1ий вид; на фиг. 2губка схвата с вырезо.м части корип/са убки; на фи1. 3 д.оиО. 1нительн;)1Й д,атчик усилия сжатия; па фп1. 4 - г)афик .5ависим(} сти силы { сжатия, действхющей па .захватываемый предмс и лек-|-; ическог() c-o;ipoтивления R между полосами ); д.ецормаНКИ S губки.
Захват нро.мышленного робота с-)стс.)и-1из корпуса 1, нриводных снмметричнь.х .vnioгозвенников, вьтолненных из вед.уи.1их звеньев 2 и тяг 3. Многозвенники соединены между собой, связаны с приводным ;5.алом 4 ки.нематической нен) и соединены с корпусом губок 5.
Каждая губка снабжена датчиком усилия сжатия, чувствительный элемент которогч; вынолнен н виде нластинн 6 из электро11ров(;1дяи.1его э.ластомера с параллельными отверетия.ми 7 и 8, расположенными в двух пе1)пендикулярных плоекоетях, соеди:ченными е системой подачи и регулирования давления рабочей среды через распределитель 9, трубопроводы 10 и отверстия 11. На противоположных гранях плае)-ииы, одна из которых контактирует с захваты8аем 1м нредмето.м, закреплено но ряду параллельных полос 12 и 13 из электропроB(X HineiCj материала, причем проекции рядов HOvioc взапмн.о перпендикулярны и полосы рас 1о; оже1п ; R промежутках между ;1роекни)).ми (Лверстий на рань пластины, иа)а;1лельно им. Кроме того, каждая губка снабжена дополнительными датчиками 14 сжатия, расположен 1ыми на осталь Ь х гранях п;1астины, каждый из которых в;.,.н в виде выступа 15 (фиг. 3), электрол,ов 16, изолированных от корпуса губки .ла/лками 17 н расположенных вокруг основагшя выступа, и электродов 18, изо..щрованных от корпуса губки прокладками 19 и расположенных на вершине выступа.
(хват работает следуюгцим образом.
-lepe.i распределитель 9, трубопроводы К) 1 отверстия 1 подают рабочую среду, )-;а 1 1имер в(;здух, под давлением. Величина iToro ...ав.ления ко1:тролируется по измене1;ию эле; трического сопротивления между карами электронолос 12 и i3. Вначале но;uiK)T дав;юн:ке Эта конкретная величина определяется для каждой групн.ы деталей наносится 3 программу управления робоfO -. Zla.iee схват подводится к пре.а.мету, и 1|)ивод ; cpe ;e;цeния губок, например элеки)омеханический, сводит i-убки, дефор.миpvM и.х. Предмет, вжимаясь в губки, соз;-,ает на каждой 1убке ноле электричес;к.их сопротивлений между полюсами 12 и 3, являк)Н1.с(чя отражением формы зажатого объ(много предмета. Чем больше деформация, ;-ем мешлые сонротивление. При появлении между какими-нибудь нолосами 12 и 13 -:лектр1-;ческо,о сопротивлеьчя, соответствуюПсго деформации Sj , также определяемой нриг-;)аммой, на приво.я пеоемещения губок по.аают сигнал останова. Как видно из графика (сриг. 4), величина деформации Sj и ;1аиле)н-1Я , определяют величину силы зажима io,,.. ;,алее схват приподнимают. Если п()е.;1ме зажат недостаточно сильно, то он иачи 1ае: проскальзывать между губками cxBaT.il. что вызывает ноетоянное изменение поля сопротивлений. Этот процесс фиксируется системой управлени5; схватом, и на привод перемещения губок подается команда свесд-и губки вплоть до некоторой деформации Sj - S{ f л S. Далее схват вновь ;1рино;1нимак)-| и вновь онреде,1яют наличие
проскальзывания. Этот процесс продолжается до тех пор, пока либо предмет не перестанет проскальзывать, либо губки не будут сведены так, что их деформация достигнет предельно допустимой деформации В последнем случае губки разводят до деформации Sj , а давление рабочей среды в губках увеличивают до Р Впип + А Р и процесс происходит до тех пор, пока предмет не перестанет проскальзывать между губками. После того, как предмет окажется надежно зажатым, схват поднимает его над столом. В связи с тем, что губки выполнены из эластомера, они вместе с зажатым в них предметом оттягиваются вниз под действием силы тяжести, действующей на захватываемый предмет. Эта деформация приводит к
Фиг.г
растяжению тех выступов 15, которые находятся в верхней части схвата (фиг. 3). Поэтому электрическое сопротивление между электродами 18 и 16 увеличивается до определенного значения, зависящего от веса детали.
Предлагаемая конструкция схвата позволяет определять вес детали, зажатой в схвате, что дает возможность идентифицировать ее, кроме того, она обладает способностью поставлять в систему управления информацию, дающую возможность строить формальный образ геометрической формы захватываемого предмета, что позволяет использовать изобретение в сложных промышленных и исследовательских роботах.
W
11
12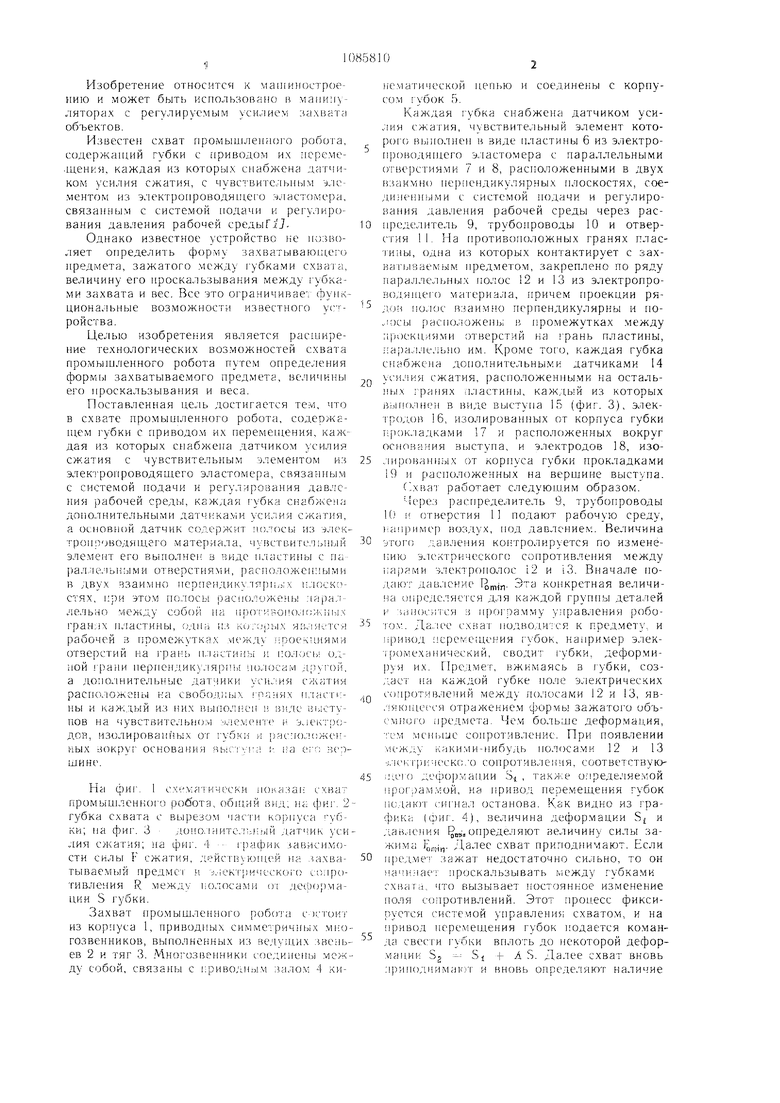
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват промышленного робота | 1983 |
|
SU1104017A1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| Схват | 1986 |
|
SU1393628A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Схват промышленного робота | 1986 |
|
SU1315307A2 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Схват промышленного робота | 1985 |
|
SU1284830A1 |
| Схват промышленного робота | 1986 |
|
SU1328196A1 |
СХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий губки с приводом их перемещения, каждая из которых снабжена датчиком усилия сжатия, имеющим чувствительный элемент из электропроводящего эластомера, связанным с системой подачи и регулирования давления рабочей среды, отличающийся тем, что, с целью расширения технологических возможностей путем определения формы захватываемого пред-И мета, величины его проскальзывания и веса, каждая губка снабжена дополнительными датчика.ми усилия сжатия, а основной датчик содержит полосы из электропроводящего материала, чувствительный элемент его выполнен в виде пластины с параллельными отверстиями, расположенными в двух взаимно перпендикулярных плоскостях, при этом полосы расположены параллельно на противополож)1ых гранях пластины, одна из которых является рабочей, в промежутках между проекциями отверстий на грань пластины и полосы одной грани перпендикулярны полосам другой, а дополнительные датчики усилия сжатия расположены на свободных гранях пластины и каждый из них выполнен в виде выступов на чувствительном элементе и электродов, изолированных от губки и расположенных вокруг основания выступа (Л и на его вершине. о 00 ел 00 /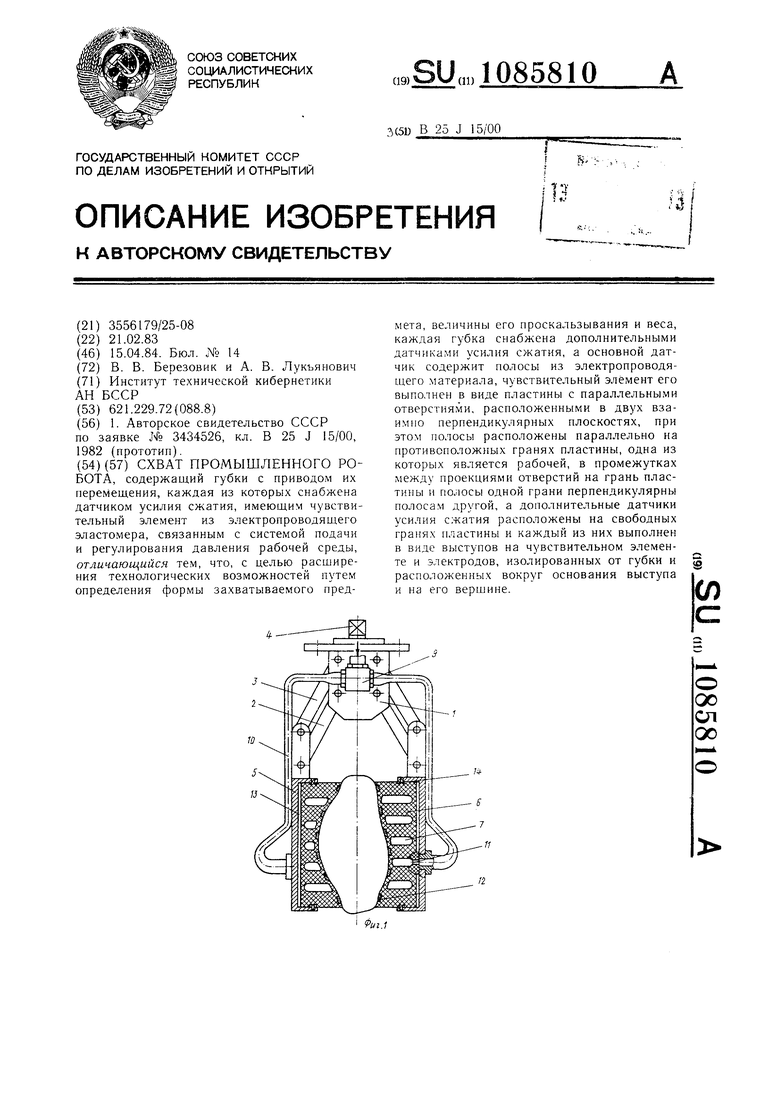
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3434526, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
