(5) ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный захват манипулятора | 1980 |
|
SU933452A1 |
| Очувствленный схват промышленного робота | 1983 |
|
SU1104017A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Очувствленный захват манипулятора | 1989 |
|
SU1703454A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
1
Изобретение относится к машиностроению и может найти применение в робототехнике.
Преимущественно изобретение может быть использовано при создании захватов про.мышленных роботов и манипуляторов для надежного и быстрого Закрепления объектов различной формы и массы.
Известно фотоэлектрическое устройство для измерения размеров объектов,
содержащее волоконнооптический преобразователь и сканатор дискретного типа, снабженный шаговым двигателем Г1.
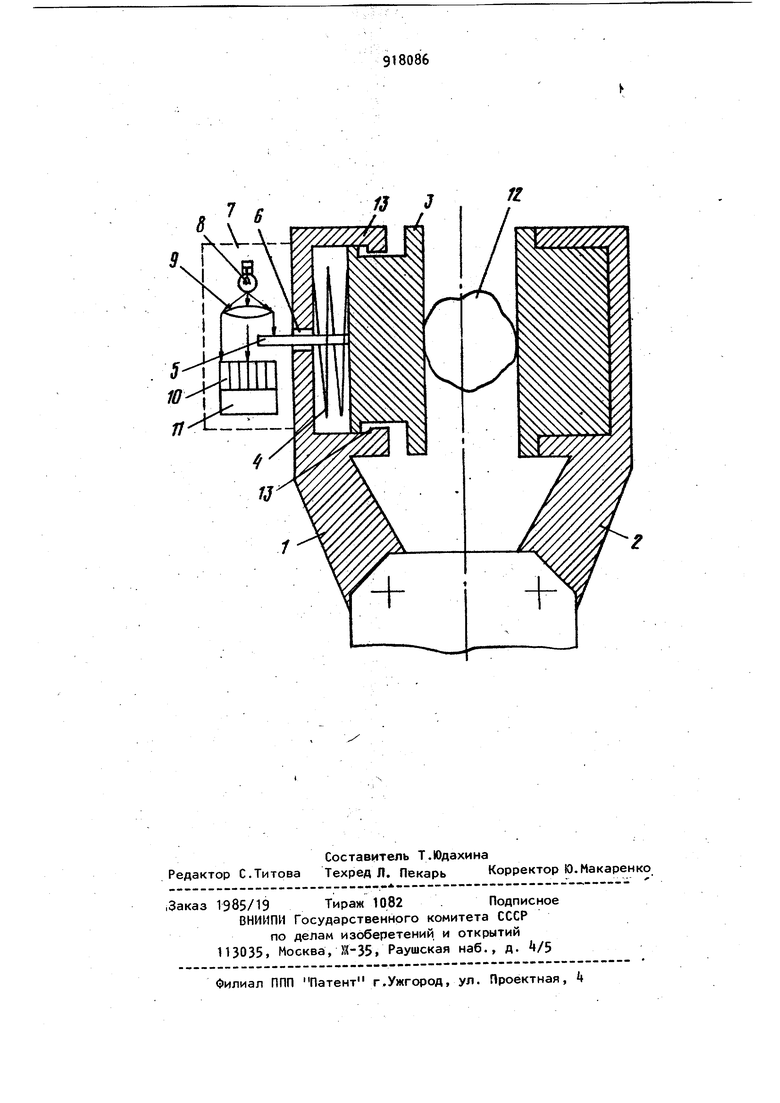
Недостатком известного устройства является то, что оно не может быть применено для контроля величины усилия сжатия захватом промышленного ро- JQ бота перемещаемого объекта. Указанный недостаток обусловлен тем, что зуо устройство предназначено только для измерений размеров объектов..
Наиболее близким по технической сущности и достигаемому результату к изобретению является захват промышленного робота с встроенным контролем устройством для регулирования работы захватывающего механизма, содержащий подвижный элемент, который перемещается при захвате изделия и воздействует на микровыключатель, подающий сигнал в систему управления захватом 23Недостатком известного устройства является невозможность регулирования величины УСИЛИЯ сжатия захватом перемещаемого объекта, а также низкая надежность его работы. Указанные недостатки обусловлены тем, что применяемый в устройстве микровыключатель способен фиксировать только момент захвата объекта, и, являясь электромеханическим устройством, ограниченное число переключений, что снижает надежность работы захвата. Целью изобретения является обеспечение плавного регулирования величины усилия сжатия захватом перемеща емого объекта и повышение надежности его работы.. Указанная цель достигается тем, что в захвате промышленного робота, имеющем зажимные .рычаги с прикреплен ными к ним губками и датчик усилия сжатия, одна из губок подпружинена относительно зажимного рычага и снаб жена жестко связанным с ней одним концом стержнем, причем второй конец стержня расположен в рабочей зоне датчика усилия сжатия , который мо жет быть выполнен, например, в вИде высоконнооптического преобразователя . Наличие в захвате стержня,жестко прикрепленного к губке, подпружинен ной и подвижной относительно зажимно го рычага, позволяет с помощью волоконнооптичекого преобразователя регистрировать величину перемещения стержня и по ней контролировать величину усилия сжатия захватом переме щаемого объекта. Использование в за вате бесконтактного датчика усилия сжатия, например волоконнооптического преобразователя вместо электромеха ичёского, позволяет повысить надежность его работы. На чертеже изображен захват в раз резе. Захват промышленного робота с дат чиком усилия сжатия содержит зажимны рычаги 1 и 2. В одном из зажимных ры чагов , например в рычаге 1, с рабочей стороны расположена губка 3, под пружиненная с помощью пружины 4 и подвижная относительно зажимного рычага I, жестко прикрепленный к губке 3 стержень 5 направленный в сторону зажимного рычага 1, свободно проходящий сквозь отверстие 6 в нем и свя занный с волоконнооптическим преобразователем 7, состоящем из источника 8 света, линзы 9, формирующей параллельный пучок света, дискретной вoлoкoннooпtичecкoй линейки 10 и сопряженного с ней блока 11 фотоприемников. Захват работает следующим образом В исходном состоянии перед взятием объекта 12 губка 3 под воздействи ем пружины сдвинута относительно зажимного рычага 1 до выступов 13,Т1ри этом световой поток от источника света 8 засвечивает все дискреты волоконнооптической линейки ,10, передается по ним к фотоприемникам блока 11, с помощью которых преобразуется в электрические сигналы. При захвате и сжатии объекта 12 под воздействием силы отталкивания, равной и противоположно направленной силе сжатия, губка 3 перемещается относительно зажимного рычага 1,сжимая пружину 4. Вместе с ней перемещается и стержень 5 перекрывая собой световой поток, формируемый источником 8 и линзой 9 и па(ающий на дискреты волоконнооптической линейки 10. Это приводит к изменению электрических сигналов затененных фотоприемников в блоке 11. По числу изменившихся электрических сигналов, соответствующих числу перекрытых дискретов волоконнооптической линейки 10, судят о величине усилия сжатия захватом перемещенного объекта 12. Использование изобретения расшияет область его применения и позволяет со здать в работе захваты промышленных р(эботов с автоматической регулировкой величины усилия сжатия перемещаемого объекта. Формула изобретения 1.Захват .промышленного робота, содержащий зажимные рычаги, снабженные губками, и датчик усилия сжатия, отличающийся тем, что, с целью повышения надежности работы и обеспечения возможности плавного регулирования величины зажимного усилия, одна из губок подпружинена относительно зажимного рычага и снабжена жестко связанным с ней одним концом стержнем, причем второй конец стержня расположен в рабочей зоне датчика усилия сжатия. 2.Захват по п. 1, о т л и ч а ющ и.й с я тем, что датчик усилия сжатия выполнен в виде волоконнооптического преобразователя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № , кл. G 01 В Il/Qi, 1969. 2.Заявка Японии W 50-129 6, кл. В 25 J 15/00, 1975 (прототип)
