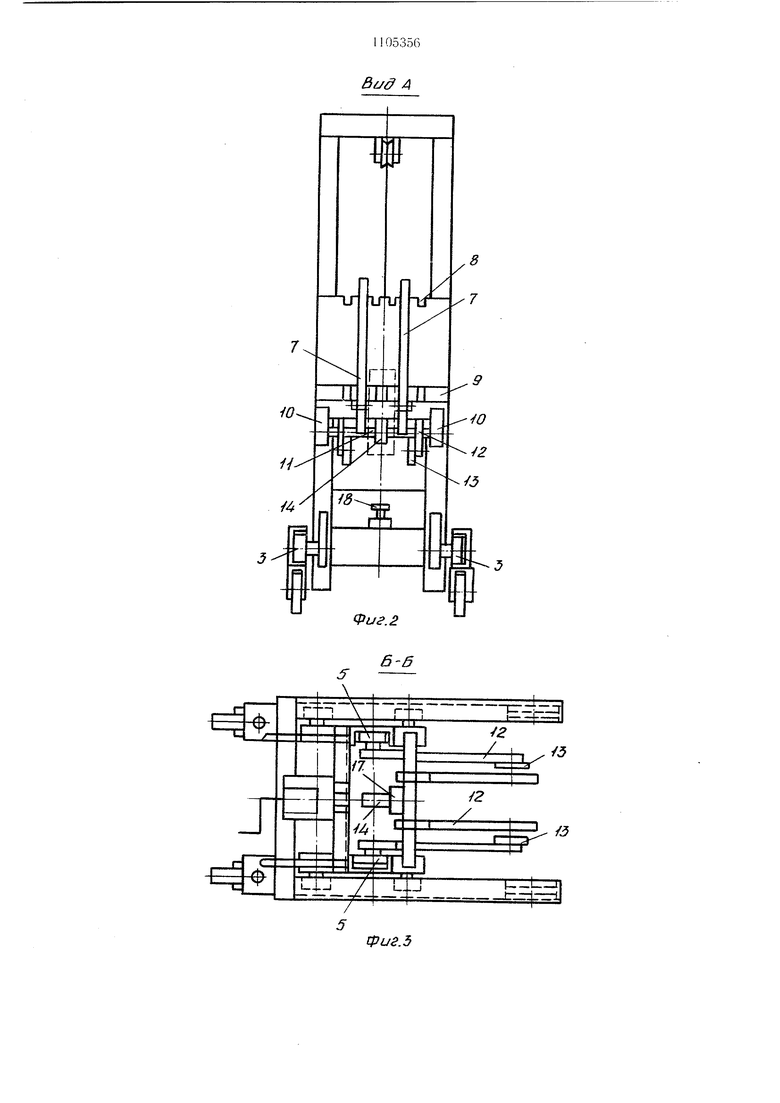
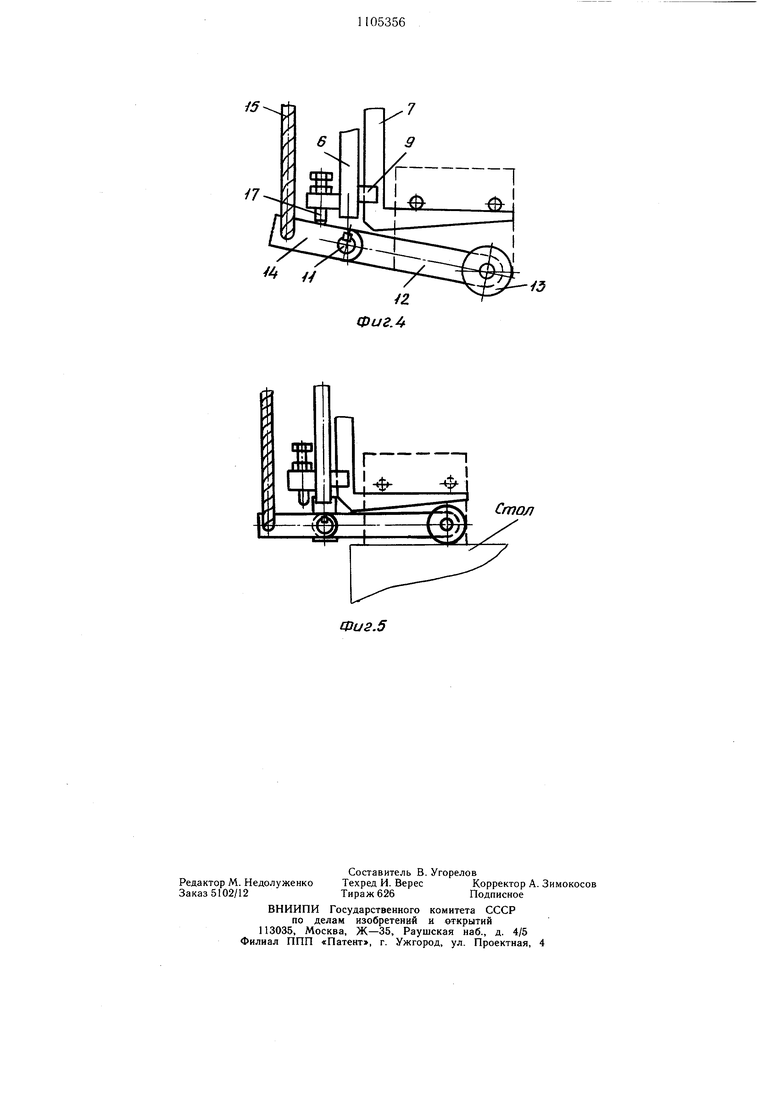
Изобретение относится к металлообрабатывающей промышленности и предназначено для перевозки в производственных помещениях различных приспособлений, штампов, технологической оснастки, тары с заготовками и других грузов, а также для съема или подъема их на стеллажи, верстаки, столы прессов, станков. Наиболее близким техническим решением к предлагаемому является транспортная тележка, содержащая опорную раму, установленные на ней вертикальные направляющие и размещенную в них каретку с грузоподъемными вилами, подвижную посредством троса и лебедки 1. Недостатком указанной тележки является то, что оно не обеспечивает возможности взаимодействия с грузом, расположенным за габаритами тележки, т. е. на поверхности, под которую не может подъехать тележка, что приводит к перемещению груза вручную. Цель изобретения - повыщения удобства эксплуатации путем обеспечения взаимодействия с размещенной за габаритами опорной рамы тележки с грузом. Указанная цель достигается тем, что в транспортной тележке, содержащей опорную раму, установленные на ней вертикальные направляющие и размещенную в них каретку с грузоподъемными вилами, подвижную посредством троса и лебедки, вертикальные направляющие установлены с возможностью продольного перемещения вдоль ра мы и фиксации в заданном положении, а на каретке посредством поперечного шарнира установлен разноплечий рычаг, большее плечо которого оборудовано опорным роликом, а другое связано с тросом, и закреплен с возможностью взаимодействия со вторым плечом рычага регулируемый упор. На фиг. 1 изображена тележка, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4- рычаг в момент перемещения груза; на фиг. 5 - рычаг в момент отсоединения. Тележка имеет раму 1 с колесами 2, на которой установлены подвижно на колесах 3 вертикальные направляющие 4. На вертикальных направляющих 4 на роликах 5 установлена каретка 6, на которой установлены сменные переставные захваты 7 в пазах 8 и 9. В нижней части каретки в кронщтейнах 10 установлена ось 11 со шпоночной канавкой. На оси 11 подвижно вдоль ее оси установлены два рычага 12. На концах рычагов 12 смонтированы ролики 13. На середину оси 11 жестко насажен рычаг 14, конец которого соединен тросом 15 с лебедкой 16 и взаимодействует с регулируемым упором 17. Вертикальные направляющие взаимодействуют с горизонтальной рамой 1 посредством фиксатора 18. Тележка работает следующим образом. Если груз необходимо снять со стола, тележку подвозят к объекту, расфиксируют подвижные вертикальные направляющие 4 с горизонтальной 1 и перемещают ее вперед до стола, поднимают лебедкой 16 каретку 6 так, чтобы ролики 13 совпали с плоскостью стола, а захваты 7 оказались ниже грузовых болтов 19. Затем вертикальные направляющие 4, перемещая вперед по горизонтальным направляющим рамы 1, подводят захваты 7 под грузовые болты 19 груза 20, при этом ролики 13 перемещаются по плоскости стола, Работая лебедкой 16, поворачивают рычаги 14 и 12 вокруг оси ролика 13, при этом поднимается каретка 6 с захватами 7. Когда захваты 7 соприкоснутся с грузовыми болтами 19, приподнимается и груз 20 над столом, когда рычаг 14 упрется в регулируемый упор 17, произойдет подъем груза над столом и вертикальные направляющие 4 возвращают в исходное положение и фиксируют ее с горизонтальной рамой 1. Ролики 13 играют роль опоры от опрокидывания тележки, когда центр тяжести груза находится впереди передних колес 2 рамы 1. При разгрузке тележки ее подвозят к объекту до соприкосновения с ним рамы 1. Разъединяют вертикальные направляющие 4 с горизонтальной рамой 1 и подводят ее также к грузу. Лебедкой 16 устанавливают ролики 13 на один уровень с опорной поверхностью, вертикальные направляющие 4 перемещают вперед, при этом ролики 13 перемещаются по плоскости стола. В крайнем положении вертикальных направляющих 4 лебедкой 16 опускают каретку 6. При опускании каретки 6 опускаются рычаги 12 и транспортируемый груз 20. Когда груз 20 окажется на столе, продолжается опускание каретки 6 до тех пор, пока захваты 7 не окажутся ниже грузовых болтов 19. После этого вертикальную раму 4 выводят в крайнее заднее положение и фиксируют ее с рамой 1 фиксатором 17. В зависимости от размеров и формы груза захваты 7 могут быть переставлены по пазам 8 и 9, а рычаги 12 - по оси 11. Изобретение позволяет непосредственно захватами тележки осуществлять установку и съем транспортируемого груза на стол или со стола, облегчить таким образом тяжелый физический труд транспортных рабочих, увеличить производительность труда.
s
бб
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1972 |
|
SU537023A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Устройство для подачи грузов в оконные проемы | 1986 |
|
SU1379428A1 |
| Устройство для монтажа и демонтажа колес автомобилей | 1983 |
|
SU1232530A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2393986C2 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ И ПОШТУЧНОЙ РАЗБОРКИ ИХ ПАЧЕК | 1990 |
|
RU2029639C1 |
ТРАНСПОРТНАЯ ТЕЛЕЖКА, содержащая опорную раму, установленные на ней вертикальные направляющие и размещенную в них каретку с грузонодъемными вилами, подвижную посредством ТрОСП 11 лебедки, отличающаяся тем, что, с це.ыо повышения удобства эксплуатации путем обеспечения взаимодействия с размещенной за габаритами опорной рамы теаежки с грузом, вертикальные направляющие установлены с возможностью продольного перемещения вдоль рамы и фиксации в заданно.м положении, а на каретке посредством поперечного щарнира установлен разноплечий рычаг, большее плечо которого оборудовано опорным ролико.м, а другое связано с тросом, и закреплен с возможностью взаимодействия со вторым плечом рычага регулируемый упор.
If us. 5
/4. //
1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ручная тележка | 1977 |
|
SU644654A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
