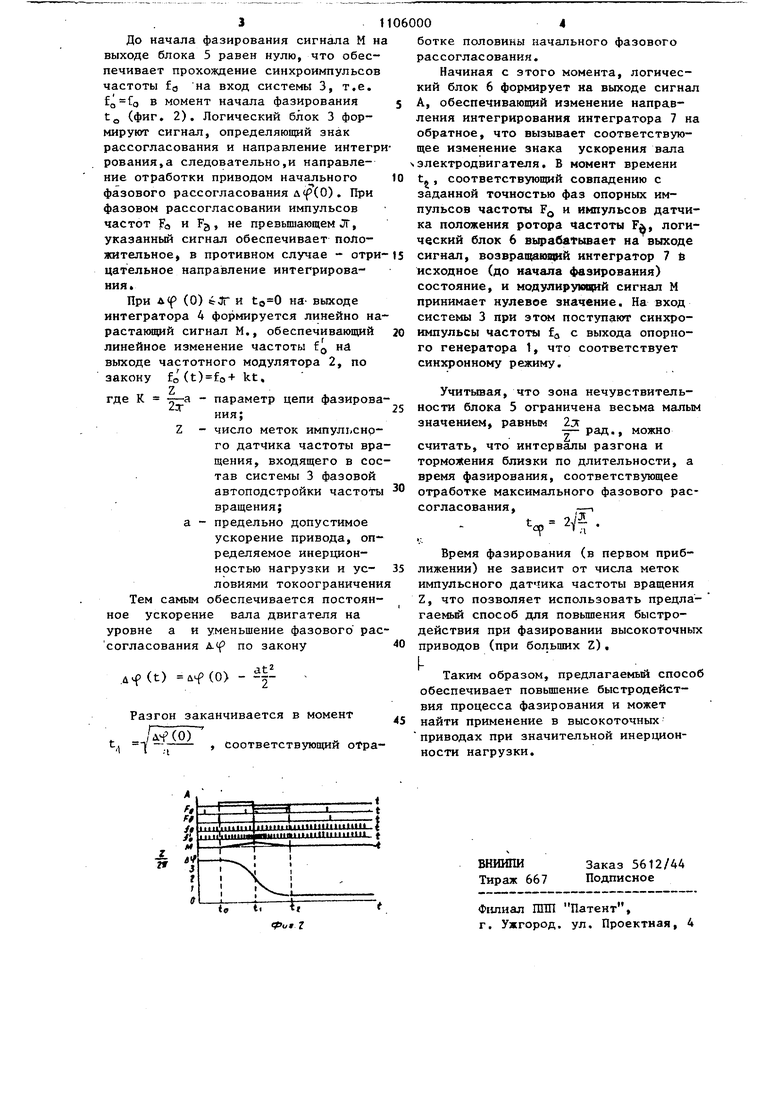
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе, Известен способ фазирования, реал зованный устройством, в котором посл прихода каждого импульса частоты t(f от опорного генератора блок опред ления фазового рассогласлзания (БОФР формирует на выходе сигнал М, обеспечивающий повышение входной частоты fp на фиксированную величину по сравнению с частотой fo . Модуляция прекращается в моменты прихода на вход БОФР импульсов датчика положения частоты F . Таким образом, модул рующий сигнал имеет в рассматриваемо случае характер импульсов с длителькостями, пропорциональными текущему. фазовому рассогласованию 17 Однако при использовании данного способа фазирование сопровождается чередованием режимов разгона и торможения привода на каждом обороте вала электродвигателя, что обуславли вает сравнительно низкую зкономичность указанного способа. Наиболее близким к изобрете;1ию яв ляется способ фазирования вращающегося вала электродвигателя, по которому формируют последовательности импульсов опорной частоты и импульсов, поступающих с датчика положения ротора электродвигателя, сравнивают их, определяют фазовое рассогласование и по результатам сравнения форми руют модулированный частотный сиг нал Г2. Существенным недостатком этого способа является ограниченное быстро действие, связанное с использованием пропорционального закона регулирования при отработке ошибки фазирования Кроме того, момент достижения синфазного состояния с заданной точностью определяют со значительным запаз дыванием, что ограничивает диапазон рабочих частот вращения при реали зации способа. Недостатком является также нечувс вительность рассмотренного алгорит ма к знаку начальной ошибки фазирования, так как доворот вала до синфа ного состояния производят только в одном направлении,что также увеличивае длительность процесса фазирования. Цель изобретения - повьшение быст родействия. Поставленная цель достигается тем, что согласно способу фазировани вращающегося вала электродвигателя, по которому формируют посл.ч,:,оЕательности импульсов опорной -iCfOTbi и импульсов, поступающих С датчика положения ротора электродвигателя, сравнивают их, определяют фазовое рассогласование и по результатам сравнения формируют модулированный частотньй сигнал-, дополнительно определяют знак фазового рассогласо- . вания, формируют напряжение, пропорциональное предельно допустимому ускорению вала электродвигателя, определяют время, соответствующее половине величины начального фазового рассогласования, формируют линейно-изменяющееся напряжение, в соответствии с которым модулируют частотньй сигнал, причем при положительном знаке фазового рассогласования, начиная с момента появления фазового рассогласования и до времени, соответствующего половине величины фазового рассогласования, линейно изменяющееся напряжение нарастает, а далее - спадает. На фиг. 1 изображена схема устройства, реализующего предлагаемьй способ; на фиг. 2 - диаграммы, поясняющие работу устройства. Устройство содержит последовательно -соединенные опорный генератор 1, частотньй модулятор 2, систему 3 фазовой автоподстройки с электродвигате лем, на валу которого установлен датчик положения 4 ротора. Датчик положения 4 ротора и опорный генератор 1 соединены с блоком 5 определения фазового рассогласования, выход которого соединен с частотным модулятором 2. Блок 5 определения фазового рассог ласования содержит логический блок 6 и интегратор 7, причем входы логического блока б являются входами, а выход интегратора 7 - выходом блока 5, Способ осуществляется следующим образом. Опорный генератор 1 подает синхроимпульсы частоты fo на вход частотного модулятора 2 и опорные импульсы фазирования частоты FO , равной заданной частоте вращения электродвигателя, на вход блока 5 определения фазового рассогласования. Последний определяет текущее фазовое рассогласование л.1|з опорных импульсов частоты 7и выходных импульсов датчика положения 4 частоты FO, поступающих на второй его вход. До начала фазирования сигнала М н выходе блока 5 равен нулю, что обеспечивает прохождение синхроимпульсов частоты fo на вход системы 3, т.е. в момент начала фазирования to (фиг. 2). Логический блок 3 формируют сигнал, определяющий знак рассогласования и направление интегр рования, а следовательно,и направление отработки приводом начального фазового рассогласования дср(О). При фазовом рассогласовании импульсов частот Fa и Fg, не превышающем JT, указанный сигнал обеспечивает положительное, в противном случае - отри дательное направление интегрирования. При (0) fcJT и на- выходе интегратора 4 формируется линейно на растающий сигнал М., обеспечивающий линейное изменение частоты f на выходе частотного модулятора 2, по закону fo(t)fo+ kt, 2 где К - параметр цепи фазирова число меток импульсного датчика частоты вра щения, входящего в сос тав системы 3 фазовой автоподстройки частоты вращения; а - предельно допустимое ускорение привода, определяемое инерционностью нагрузки и условиями токоограничени Тем самым обеспечивается постоянное ускорение вала двигателя на уровне а и уменьшение фазового рас согласования по закону д (t) uf (0) - - Разгон заканчивается в момент соответствующий оТра-1 1- ботке половины начального фазового рассогласования. Начиная с этого момента, логический блок 6 формирует на выходе сигнал А, обеспечивающий изменение направления интегрирования интегратора 7 на обратное, что вызывает соответствующее изменение знака ускорения вала электродвигателя. В момент времени tj, соответствующий совпадению с заданной точностью фаз опорных импульсов частоты FQ и импульсов датчика положения ротора частоты Гд, логический блок 6 вырабатьюает на выходе сигнал, возвращаю ф1й интегратор 7 и исходное (до начала фазирования) состояние, и модулируюций сигнал М принимает нулевое значение. На вход системы 3 при эгам поступают синхроимпульсы частоты fo с выхода опорного генератора 1, что соответствует синхронному режиму. Учитывая, что зона нечувствительности блока 5 ограничена весьма малым значением, равным 2: 2-рад.. можно считать, ., что интервалы разгона и торможения близки по длительности, а время фазирования, соответствующее отработке максимального фазового рассогласования, Время фазирования (в первом приближении) не зависит от числа меток импульсного датчика частоты вращения Z, что позволяет использовать предлагаемый способ для повьппения быстродействия при фазировании высокоточных приводов (при больших Z). Таким образом, предлагаемый способ обеспечивает повьшение быстродействия процесса фазирования и может найти применение в высокоточных приводах при значительной инерционности нагрузки.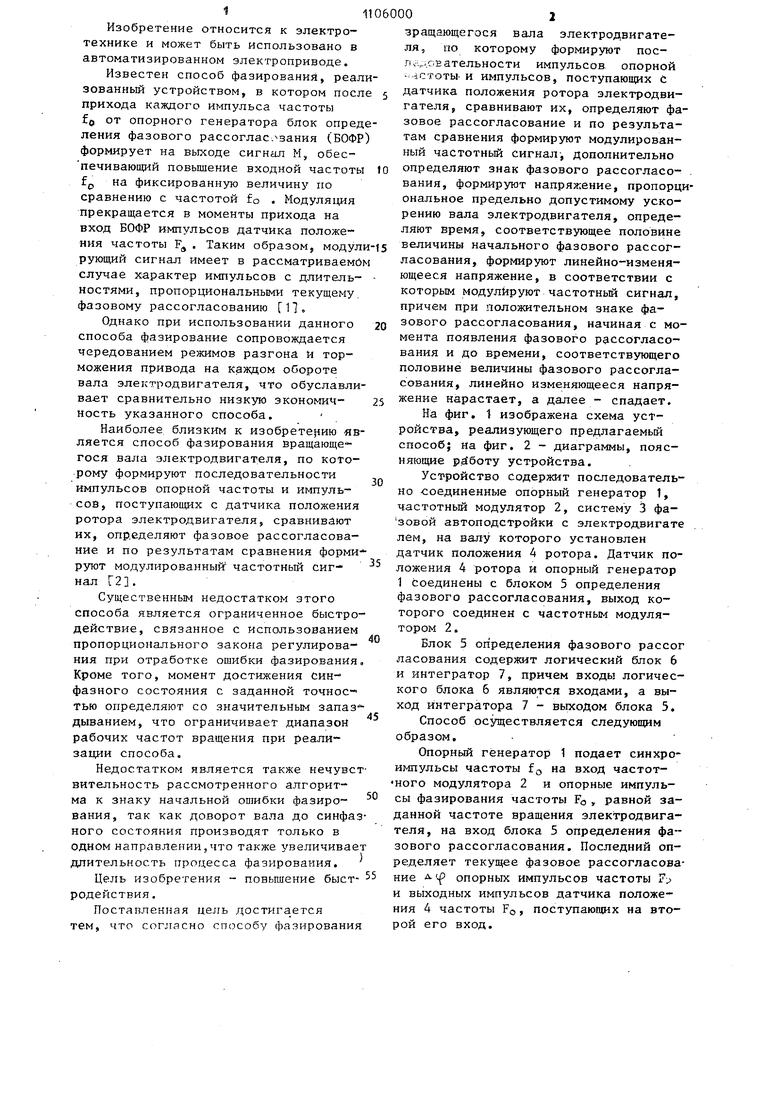
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475932C1 |
| Устройство для управления многодвигательным электроприводом | 1984 |
|
SU1220098A1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2649307C1 |
| Устройство для импульсного регулиро-ВАНия фАзОВОгО пОлОжЕНия POTOPA СиН-ХРОННОгО элЕКТРОдВигАТЕля | 1979 |
|
SU817960A1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608177C2 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ, по которому формируют последовательности импульсов опорной частоты и импульсов, поступающих с датчика положения ротора электродвигателя, сравнивают их определяют фазовое рассогласование и по результатам сравнения формируют модулированный частотный сигнал, отличающийся тем, что, с целью повьшения быстродействия, дополнительно определяют знак фазового рассогласования, формируют напряжение, пропорциональное предельно допустимому ускорению вала электродвигателя, определяют время, соответствующее половине величины на чального фазового рассогласования, формируют линейно-изменяющееся напряжение, в соответствии с KOTOI.IM модулируют частотный сигнал, причем при положительном знаке фазового рассогласования, начиная с момента появления фазового рассогласования и до вре мени, соответствующего половине величины фазового рассогласования, линейно изменяющееся напряжение нарастает, а далее - спадает. 9) &
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФАЗИРОВАНИЯ СИНХРОННО ВРАЩАЮЩИХСЯ ВАЛОВ | 0 |
|
SU291368A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
