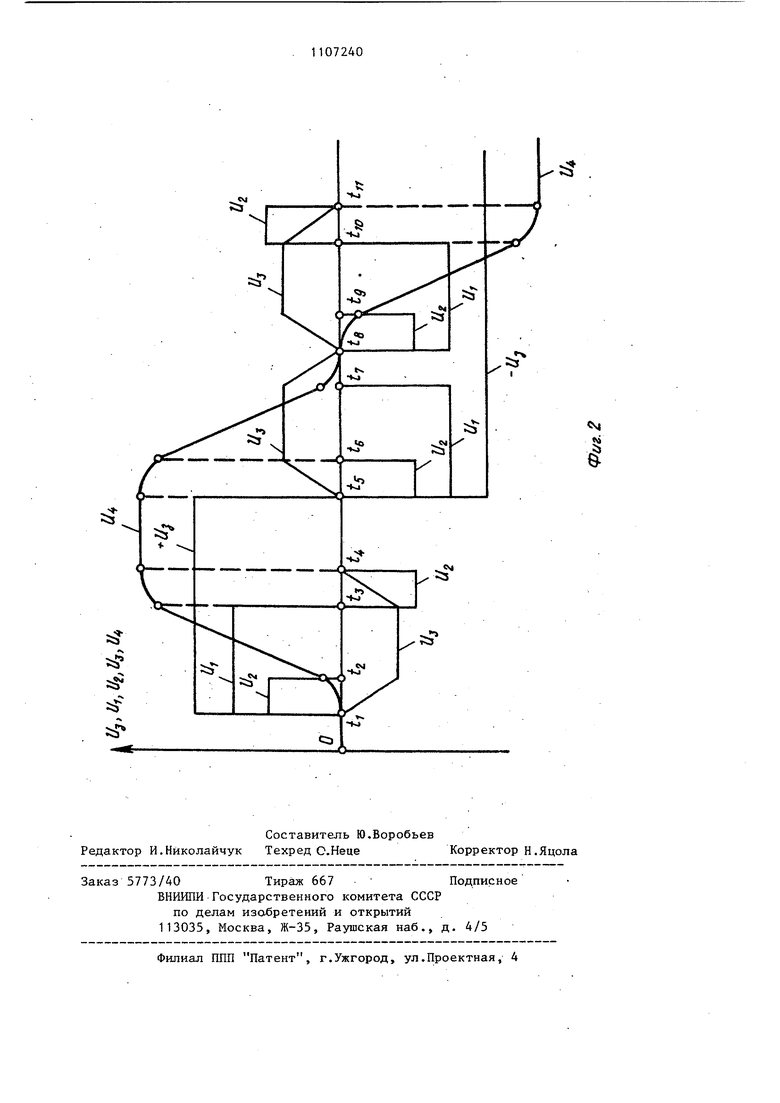
Изобретение относится к электротехнике, а именно к системам тиристорного управления электроприводами постоянного тока промьшленных установок различных отраслей промышленности, которые по условиям работы в пускотормозных и реверсивных режимах требуют ограничения персой и второй производственных скорое (ускорения и рывка), и может быть преимущес венно использовано для формирования задающего сигнала, т.е. изменяющегося во времени напряжения на входе системы регулирования в соответствии с требуемым законом изменения скорости (частоты вращения) электродвигателя п;т1 разгоне, торможении, реверсе и установившемся движении. Известно задающее устройство для электропривода, состоящее из трёх операционных усилителей, из которых перрмй - линейный, а второй и третий - интеграторы, обратной связи с выхода третьего на вход первого усилителя и цепи стабилизации с выхода пер.о:го усилителя на ограничитель вы ходного напряжения второго { . Однако это устройство хотя и обес печивает ограничение ускорения и рывка для электропривода, но не обес печивает контроль отработки каждого из динамических показателей, характеризующих параболический и прямолинейный у;астки ограничения рывка и ускорения. Кроме того имеется некачественность в работе устройства, проявляющаяся в колебательности выходного напряжения в отдельные момен ты его формирования; сложна цепь стабилизации и затруднена ее настрой ка; отсутствуют участки с параболическим законом изменения вьскодного напряжения, соответствующие ограничению рывка, в моменты изменения полярности выходного напряжения. Наиболее близким по технической сущности к изобретению является устройство для управления электроприводом, содержащее последовательно соединенные первый нуль-орган с первым блоком ограничения в цепи обратной свяяи, второй нуль-орган с вторым блоком ограничения в цепи обратной связи, первый интегратор, второй интегратор, выход которого является выходом устройства и соединен через первый резистор с инверсным входом первого нуль-органа, прямой вход которого через второй резистор сое0динен с выходом первого интегратора. Соединенным также через третий резистор с прямым входом второго нульоргана. Устройство обеспечивает ограничение рывка и ускорение при разгоне и торможении приводного электродвигателя 2 . Недостатком известного устройства является неспособность обеспечить ограничение рывка при .реверсе задающего (выходного) сигнала и, следовательно, в кинематических звеньях электропривода имеют место дополнительные динамические нагрузки, которые могут привести к выходу из строя электропривода. Целью изобретения является повышение качества регулирования путем ограничения рывков при реверсе. Поставленная цель дости1ается тем, что в устройство для управления электроприводом, содержащее последовательно соединенные первый нуль-орган с первым блоком ограничения в цепи обратной связи, второй нуль-орган с BTopbiM блоком ограничения в цепи обратной связи, первый интегратор, второй интегратор, выход которого явагыется выходом устройства и соединен через первый резистор с инверсным входом первого нуль-органа, прямой вход которого через второй резистор соединен с выходом первого интегратора, соединенным также через третий резистор с Прямым входом второго нуль-органа, введены два диода, два ключа и два индикатора полярности напряжения, входы которых соединены с выходом второго интегратора, а выходы - с управляющими входами соответственно первого и второго ключей, при этом анод первого и катод второго диодов объединены и образуют вход устройства, катод первого диода через первый ключ и анод второго диода через, второй ключ связаны с прямым входом первого нульоргана. На фиг. 1 приведена схема предлагаемого устройства; на фиг. 2 - эпюры напряжений в отдельных точках устройства. Устройство для управления электроприводом содержит последовательно соединенные нуль-орган 1 с блоком 2 ограничения в цепи обратной связи, нуль-орган 3 с блоком 4 ограничения в цепи обратной связи, интегратор 5, интегратор 6, выход которого является выходом устройства и соединен через первьй резистор 7 с инверсным входом нуль-органа 1, прямой вход которого через резистор 8 соединен с выходом интегратора 5, соединенным также через резистор 9 с прямым входом нуль-органа 3, диоды 10 и 11, ключи 12 и 13 и индикаторы 14 и 15 полярности напряжения J.входы которых соединены с выходом интегратора 6, а выходы - с управляющими входами соответственно ключей 12 и 13, при это анод диода 10 и катод диода 11 объединены и образуют вход устройства, катод диода 10 через ключ 12 и анод диода 11 через ключ 13 связаны с прямым входом пуль-органа 1.. Устройство работает следующим образом. В исходном состоянии при отсутствии сигнала управления на входе выходное напряжение устройства равно нулю. Также равно нулю выходное напряжение индикаторов 14 и 15 полярности напржкений. При этом ключи 12 и 13 замкнуты. Таким образом устройство подготовлено для приема сигнала управления, поступающего на его вход с последующим прохождением через диод 10 и ключ 12 при положительной полярности сигнала и через диод 11 и ключ 13 при отрицательной полярности. При подаче на вход устройства управляющего сигнала, например, положительной (отрицательной) полярности (i t) скачком возрастает напряжени нуль-органа 1, а также напряжение нуль-органа 3. Это вызывает рост на пряжения интегратора 5 по прямолинейному закону. Тогда выходное напр жение интегратора 6 при линейновозрастающем сигнале (выход интегратора 5) растет по закону параболы. Временные характеристики параболы определяются блоками 2 и 4 ограниче ния, постоянными интегрирования инт раторов 5 и 6. Появление на выходе устройства напряжения положительной (отрицател ной) полярности фиксируется индикатором 14 (15) полярности напряжения с последующим размыканием ключа 13 (12), блокирующим возможность подач напряжения отрицательной (положител ной) полярности на вход нуль-органа 1 ., В момент времени t выходное напряжение интегратора 5 станоБИТся равньм выходному напряжению нуль-органа 1 и под влиянием сигнала обратной связи, осуществляемой резистором 9, напряжение нуль-органа 3 снижается до нуля. Рост напряжения интегратора 5 прекращается и постоянно в течение времени- t . При ,, закон нарастания напряжения на де интегратора 6 изменяется на прямолинейный. Когда суммарный сигнал основной обратной связи через резистор 7 и цепи стабилиазции через резистор 8 на входе нуль-органа 1 сравняется с управляющим, выходное напряжение этого нуль-органа 1 также становится равным нулю. Это соответствует моменту . Поскольку напряжение нульоргана 1 является входнь м для внутреннего контура (нуль-орган 3 - интегратор 5 - резистор 9), то при равенстве этого напряжения нулю напряжение второго нуль-органа 3 изменяет свой знак на противоположный под влиянием обратной связи (резистор 9) и достигает значения, опреде,пяемого блоком 4 ограничения. Напряжение интегратора 5 начиттает уменьшаться по прямолинейному закону, а выходное напряжение интегратора 6 - соответственно по параболическому вплоть до установившггося значения. Этому процессу соответствует интервал времени . К моменту ±4 выходные напряжения нуль-органов 1 и 3 интегратора 5 равны нулю, а выходное напряжение интегратора б напряжению на входе нуль-органа 1. момент , соответствующий реверсированию управляющего сигнала с положительной (отрицательной) полярности на отрицательную (положительную) на входе устройства или снятию сигнала, напряжение на входе нуль-органа 1 равно нулю, поскольку прохождение сигнала блокируется диодом 10 (11) и разомкнутым ключом 13 (12). После изменения полярности управсигнала на входе устройства ляющего или его снятия, сопровождаемого исчезновением напряжения на входе нульорг.ана 1, скачком возрастает напряжение отрицательной (положительной) полярности на выходе нуль-органа 1 под действием напряжения, поступающего с интегратора 6 по цепи обратной связи через резистор 7. Уровень выходного напряжения нуль-органа 1 ограничивается блоком 2 ограничения. При этом также скачком возрастает выходное напряжение отрицательной (положительной) полярности нуль-органа 3 до уровня, ограничиваемого блокок 4 ограничения. Это, в свою очередь, вызывает изменение напряжения положительной (отрицательной) полярности интегратора 5 по прямолинейному закону и, как следствие, изменение напряжения интегратора 6 по закону параболы. В момент (, выходное напряжение интегратора 5 становится равным выход ному напряжению нуль-органа 1 и под влиянием обратной связи через резистор 9 напряжение нуль-органа 3 снижается до 1уля. Изменение напряжения интегратора 5 прекращается и постоянно до момента ,, определяя тем самьш линейное уменьшение выходного напряжения интегратора 6 на интервале t(.. В момент выходное напряжение нуль-органа 1 становится равным нулю в результате компенсации на его выходе напряжений, поступающих по цепи обратной связи (резистор 7) и по цепи стабилизации (резистор 8). Дальнейшие процессы в устройстве снязаны с формированием параболического учас ка на интервале t-,. После сниже ния выходного напряжения на выходе нуль-органа 1 до нуля изменяется скачком полярность выходного напряже ния нудь-органа 3 под влиянием напря жения, поступающего по цепи обратной связи (резистор 9). Последующее линейное изменение выходного напряжения интегратора 5 приводит к параболическому уменьшению выходного напряжения интегратора 6 до нуля. В момент напряжения на выходе нуль-органов 1 и 3, интеграторов 5 и 6 равны нулю. Отсутствие напряжения на выходе интегратора 6 фиксирует индикатор 15 (14) полярности напряжения с последующим замыканием бесконтактного ключа 13 (12), разрешающим прохождение сигнала с входа устройства, сформированного в момент . реверса. Если в момент сигнал реверса сформирован и к моменту присутствует на входе устройства, то характер процессов в нем повторяется. Если в момент сигнал управления снимается с входа устройства или реверсируется, но к моменту снимается, то процессы в устройстве на этом заканчиваются. Таким образом, устройство обеспечивает ограничение рьшка и ускорения не только при разгоне и торможении электродвигателя, но и при реверсе задающего сигнала. Применение изобретения позволяет исключить дополнительные динамические нагрузки в механизмах электропривода, увеличивая тем самым его надежность и долговечность.
«SI
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1987 |
|
SU1417143A2 |
| Задающее устройство для электропривода | 1984 |
|
SU1248021A2 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1989 |
|
SU1695480A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1974 |
|
SU541255A1 |
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Задающее устройство для электропривода | 1975 |
|
SU606195A1 |
| Устройство задания режима движения шахтной подъемной установки | 1986 |
|
SU1406110A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1977 |
|
SU736349A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ, содержащее последовательно соединенные первый нуль-орган с первым блоком ограничения в цепи обратной связи, второй нульторган с вторым блоком ограничения в цепи обратной связи, первый интегратор, второй интегратор, выход которого является выходом устройства и соединен через первый резистор с инверсным входом первого нуль-органа, прямой вход которого через второй резистор соединен с выходом первого интегратора, соединенным также через третий резистор с прямым входом второго нуль-органа, отличающееся тем, что, с целью повьшения качества регулирования электропривода путем ограничения рывков при реверсе, в него введены два диода,-два ключа и два индикатора полярности напряжения, входы которых соединены с выходом второго интегратора, а выходы - с управляющими входами-соответственно первого и второго ключей, при этом анод первого и катод второго диодов объединены и образуют вход устройства, катод первого диода через первый ключ и анод второго диода через второй ключ связаны с прямым входом первого нуль-органа.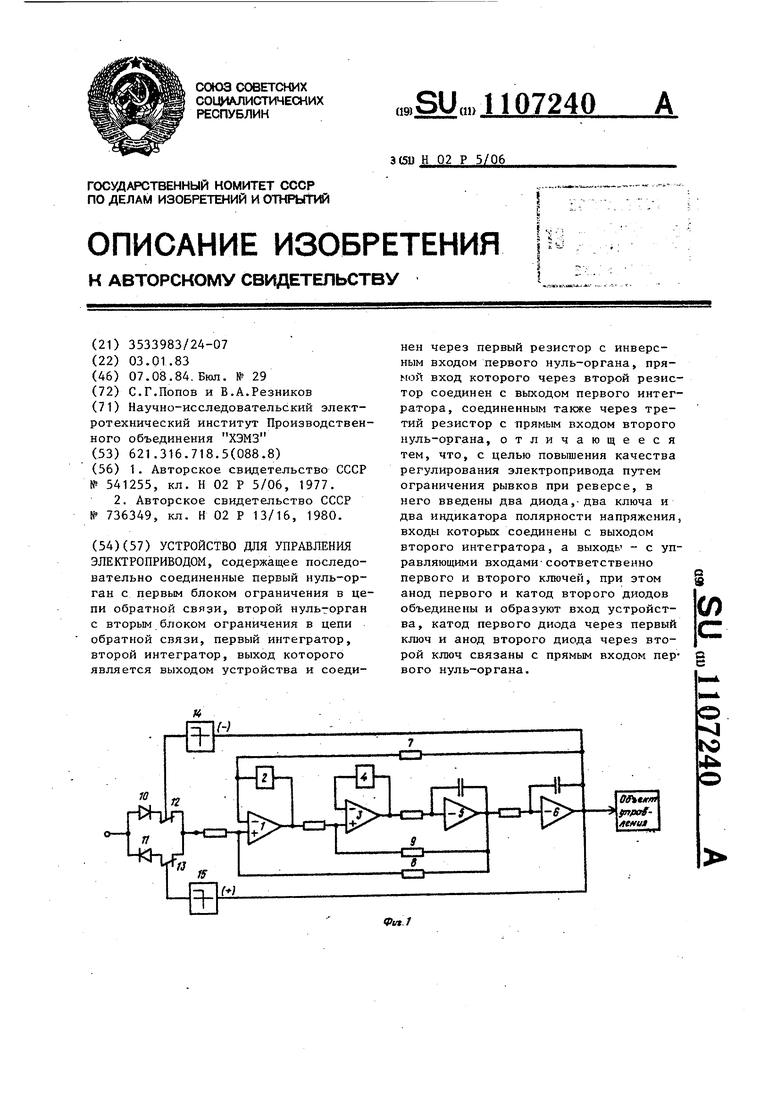
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1974 |
|
SU541255A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1977 |
|
SU736349A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
