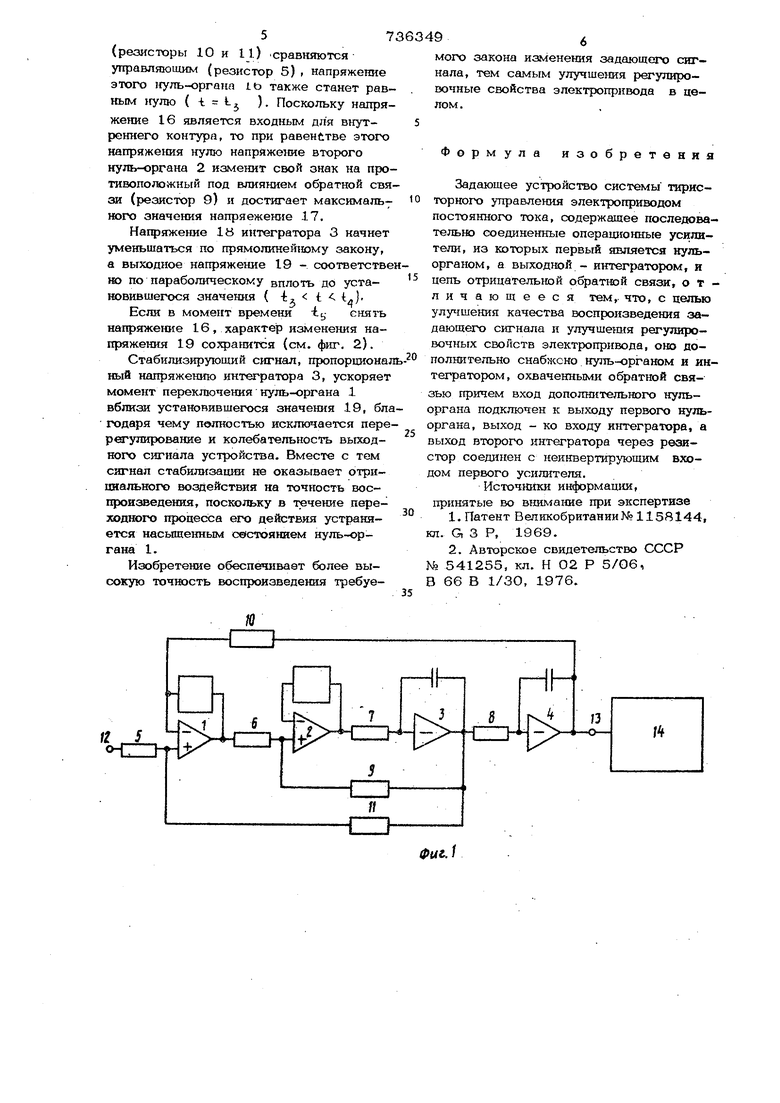
(54) ЗАДА1Ш1ЕЕ УСТРОЙСТВО СИСТЕМЫ ТИРИСТОРНСГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ Иэобрететше относится к устройствам тирис арного управления электрогфиводами постояннсях тока и предказначе1Ю для Армирования задающего сигнала, величина которого ото ажает требуемый закон изменения скорости электродвигателя прт njCKe, торможении н установившемся движении. При ограничениях по махсималыюму ускорению и интенсивности нарастания ускорения вырабатываа лый на входе систе ы регулирования задающий сигнал дол жен изменяться во Bp vtemt по закону чередующихся отрезков парабол (на участ ках ограничения интенсивности нарастания k ускорения) и касательных к ним прямых линий (при ограничении ускорения). Иазестно задакяцее устройство , обеспечивающее отработку ВЫХОД1ЮГО напряжения по закону чередующихся парабол и прямых линий, содержащее три операционных усилителя, охваченных очрииатепь ной обратной связью, из которых первый линейный, а второй и третий - интегпрПОСТОЯННСГО ТСЖА торы Q1;}, Совмещая или разделяя во времени работу интеграторов, получают соответственно параболические и npjo oлннейные участки в кривой их выходного напряжения. В цепи обратной связи первого усилитэля установлен- нелинейный преобразователь, а также предусмотрено устройство для задания тока заряда конденсатора в обратной связи первого ин- тегратрра. Однако сложность реализашш и настройки таких устройств отрьгаательно сказывается на етх надежности. Наиболее близким техническим решение к предлагаемому является задающее усгpoffcTBo, состоящее из трех операционных «.. НI I дт I .Tvlvw i-vTir / -k .ГТ усилителей, из которых первый линейный, а второй и третий интеграторы, вход первого усилителя через потенциальный разделитель соединен с ограничителем выходного напряжеш1я интегратора, благодаря чему это йапряженне отграничения является функцией напряжения первого усилитблл j. Это необходимо для обеспечения устойчивой работы аамкнучхзй структ;/ры устройства, поскольку систсл ы с последовательно соединенными интеграторами структурно неустойчивы. Однако гфи таком построеш1и 5 тройства ввиду ТОГО, что структура задающего устройств одноконтурная, не удается контролировать обработку каждого из дииа.м1гческих показатепей, характеризующих нараболичес.кий и 1рямолинейный -участки процесса в отдельности. Последнее приводит к замет отклонениям регулировочного процесса от заданного, что отрицательно сказывгются иа производительности гфивода. TOio , ис5-аа несовёриденства узла стабигщзаци.и, заключающегося в том, что лри встталении его в действие, папряжеетю огратп1чега1я первого ииггегратора не статге равным , а будет изменяться в пределах зоны, ограш1ченной гфямым падение в диодах огращтчителя, появляются пульсаш-ш выходного напряжештя устройства, отрицательно влияющие на регутфовоч51ы ,с1юйства системы в целом. : Це:ть изобретения - улучшение качеств воспроизведеш я задшошего сигнала и улу шшние регушфовочных свойств электр щжвоа.я. Поставленная цель достигается тегл, что задающее устройство, состоящее из последовательно Бклю1енных опвраююшпд усилителей, из которых первый Ш- ляется нуль-органом, а выходной з.нтегратором, к цепи отринатеяыюм обратной связи, допол ШТ€й1Ы1о ст лбжеж) г1уль-органоы и интет-раторотл, охваченными обратной свяс5ью. прпчс. вход догюлшттельного нуль-орга ш подключен к выходу первого ну.ш-оргзиа, выход -- ко входу интегратора, а цыход второго интегратора через резистор соешшен с инвертирующим входом нервах усилителш Введение до11ол1-штельного контура позволяет повысить точность воспроизвдегаш задающего напряжех-шя. путем, конт роля показаге.пей парабол1гчесхого и иря- молинейкых частков в отдельзаости. Сое дннешге выхода. дополъшиелььюго контура с кеинверТ1фу1ощим входом первого усилителя обеспечивает устойчивую рабо устройства и повышение качества ста- р билизапйи по сравненкю с известнззг( устройством. На фиг. 1 приведена принципиальная схема задающего устройства на фиг. 2 диаграмма изменения вьгходного напряжеш1Я в фуккшш времени. Задаюи ее устройство (см. фигЛ) состоит из нуль-органов 1 и 2, интеграторов 3 и 4, резисторов 5,6,7 и 8, Резистор 9,-интегратор 3 и нуль-орган 2 образуют дополнительный Koirryp, который совместно с основным обеспечивают отработку параболических участков в кривой выkoднoгo напряже}шя. Резистор 1О, состоящий в цепи отрииатеяьной обратной связи по выходному напряйсешоо устройства, нуль-органы 1 и 2, резистор 9 и интеграторы 3 л 4 образуют ОС1ЮВНОЙ контур, формирующий прямол1П1ей сые участки в кривой выходного иадряжеш-гя при постоянстве напряжения внутреннего. Резистор 11J сое.динзпощий выход интегратора 3,с неинБерТ1фующим входом нуль-органа 1, образует цепь стабилизации. Эта цепь предкааначеиа для подачи скгнала отрзвдателыюй обратной связи по п:роизвод1юй вы} одного напряжения устуюйства, Зажго, 12 предназначен для подачи на него В.ХОДНОГО дфавляющего сигнала, а зажюл 13 дпя подачи выходного сигнала задшовдего усчройств-а на вход системы 14 ештомат гаеского управления электрогфнвода. На /янахфаь мах позициями обозначены ущзавпяющий сигнал IS, напряжение 16 нуль-органа 1, напряжение 17 нуль органа 2, наяряжешю 18 интегратора 3, нап эяженне 19 штегра1Х)ра 4. Устройство работает следующим образом. При иодаче на вход 12 угфавляюшего сигнала ( t -tj ) скачком возрастает нащзяжегше нуль-органа 1, а-также напряжение 17 нуль-органа 2, Это вызывает рост напряжения интегратора 3 по щэяа -галиней1юму закону. Тогда напряжение 19 интегратора 4 при линейно-возрастающем входном сигнале 18 будет растя по затсону параболы. В момент времени -t напряжение 18 интегратора 3 станет равным напряже1шю 16 нуль-органа 1, в случае равенства сопротивления 6 н 9 и под влиянием сигнала обратной связи, осуществляемой резистором 9t напряжение второго нульоргана 2 снизится до нуля. Рост напряжения интегратора 3 прекратится и будет постояннь1М в Te4etrae времени -t t -t При -i y sa-KOH нарастания напряжения изменится на прямолинейный. В случае, когда суммарный сигнал основной обратной связи и пени стабилизации на входе первого нуль-органа 1 57 (резисторы 10 и 11.) Сравняются управляющим (резистор 5) , напряжение этого нуль-органа lo также станет равным 1гулю ( -t 15 ). Поскольку напряжение 16 является входным для внутреннего контура, то при равенстве этого напряжения нулю напряжетше второго нуль-органа 2 изменит свой знак на про тивоположный под влиянием обратной свя зи (резистор 9) и достигает максимального значения напряежение 17. Напр5пкение 18 интегратора 3 начнет уменьшаться по прямолинешюму закону, а выходное напряжение 19 - соответстве но по параболическому вплоть до установившегося значения ( -fc t 3 Если в момент времени i напряжение 16, характер изменения напряжения 19 coзфa штcя (см. фиг. 2). Стабилизирующий сигнал, пропорциона ный напряжению интегратора 3, ускоряет момент переключения нуль-органа 1 вблизи установившегося значения 19, бл годаря чему полностью исключается пере регулирование и колебательность выходного сигнала устройства. Вместе с тем сигнал стабилизации не оказывает отрнцнага)Ного воздействия на точность воспроизведения, поскольку в течение переходного процесса его действия устраняется насыще1тым состоянием нуль-органа 1. Изобретение обеспечивает более высокую точность воспроизведешш требуе9мого закона изменения задающего сигнала, тем самым улучшения регулировочные свойства элоктрогфивода в целом. Формула изобретения Задающее устройство системы тиристорного управления электроприводом постоянного тока, содержащее последовательно соединенные операщюнные усилители, из которых первый является нульорганом, а выходной - интегратором, и цепь отрицателыюй обратной связи, отличающееся тем, что, с целью улучшения качества воспроизведения задающего сигнала и улучшешш регулировочных свойств электропривода, оно дополнительно снабжено нуль-органом и интегратором, охваченными обратной связью прячем вход дополнительного нульргана подключен к выходу первого нульргана, выход - ко входу интегратора, а выход второго интегратора через резитор соединен с неинвертирующим вхоом первого усилителя. Источшгки информации, принятые во BHKMaioie при экспертизе 1.Патент ВеликобританииМ 1158144, л. G, 3 Р. 1969. 2.Авторское свидетельство СССР 541255, кл. Н 02 Р 5/06, 66 В 1/30, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1983 |
|
SU1107240A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1987 |
|
SU1417143A2 |
| Задающее устройство для электропривода | 1975 |
|
SU606195A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1989 |
|
SU1695480A1 |
| СПОСОБ ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА С ЛЮФТОМ В КИНЕМАТИЧЕСКОЙПЕРЕДАЧЕ | 1969 |
|
SU436424A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1974 |
|
SU541255A1 |
| Устройство автоматического управления скоростью прокатного стана | 1984 |
|
SU1205954A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Задающее устройство для электропривода | 1984 |
|
SU1248021A2 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |

