(54) ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПРИВОДА
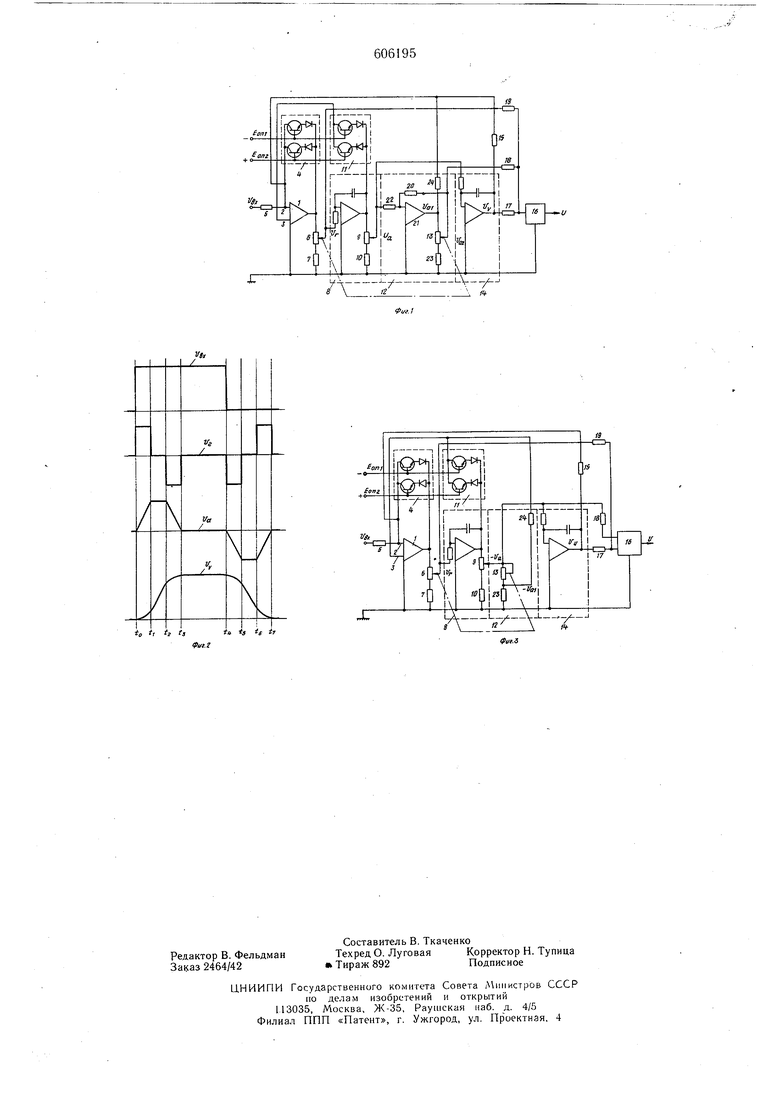
Для достижения этой цели в задающем устройстве, содержащем последопатсльяо соединенные через пере 1ениые резисторы усилитель с опорным элементом в цепи обратной связи, п роме/к уточный интегратор н выходной интегратор, выход которого подключен к цепям упрявлекия. электропривода, выход промежуточного HirreipaTopa подключен через дополнительный опори(:,1Й элемент ко входу усилителя, подвижный контакт переменного резистора на выходе промежуточ ого интегратора подсоединен также к охватывающей усилитель и промежуточный интегратор цепи линейной обратной свя зи, содержащей переменный резистор, подвижный контакт которого механически связан с подвижным контактом переменного резистора на выходе усилителя, причем оба контакта подключены к цепям управления электропривода. а опорные элементы имеют общие опорные потенциалы. Па фиг. Г приведена схема задающего устройства с основным вариантом цепи линейной обратной связи, охватывающей усилитель и промежуточный HiiTcrparop; на фиг. 2 - характер изменения ы времени формируемых в задающем устройстве сигналов управления; на фиг. 3 - схема задающего устройства с упрощенным вариантом цепи линейной обратной связи, охватывающей усилитель и промежуточный интегратор. Устройство содержит усилитель 1 с инвер, тирующим 2 и неинг}ертирующ,им .3 входами, опорным элементом 4 в цепи обратной связи, резьст ром 5 на входе, переменным ре зистором 6 и резистором 7 на выходе, промежуточный интегратор 8, вход которого подключен к по7хв 1жному контакту неременного резистора 6, а выход нагружен перерленным резистором 9 н резистором 10 и через опорный элемент 11 подключен к неинвертирующему входу усилителя 1,, цепь линейной обратной связи 12, охватывающую усилитель 1 и промежуточный интегратор 8.и включающую переменный резистор 13, подвижный контакт которого механическг- связан с подвижным контактом-переменйого резистора -6, выходной интегратор 14, вкод которого подключен к/подвижному контакту переменного резистора 9, а выход подсоединен через резистор 15 к инвертирующему входу усилителя I. К цепям управления электропривода 16 через резис.торы 17-19 нодклк чены соответственно выход выходного интегратора 14 н подвижные контакть. неремен ных резисторов 6 к 13. Цепь линейной обратной связи в основном варианте содержит охваченный через резистор 20 обратной связью усилитель - инвертор 21, вход которого через резистор 22 подключен к подвижному контакту переменпого резистора 9, выход нагружен переменным резистором 13 и резистором 23 и через резистор 24 подк почен ко входу силителя 1. На чертежах обозначены опорные потенциалы ,.„,,1,. и Яоп2, общме для опорных элементов 4 н П,.,/- скорость приподимого механизма, . сигналы, управления: Ug,.- входнсй, 11.-- заданного рывка, заданного ускорения инверси Ua,, bv- заданной и и прямые Uai ный
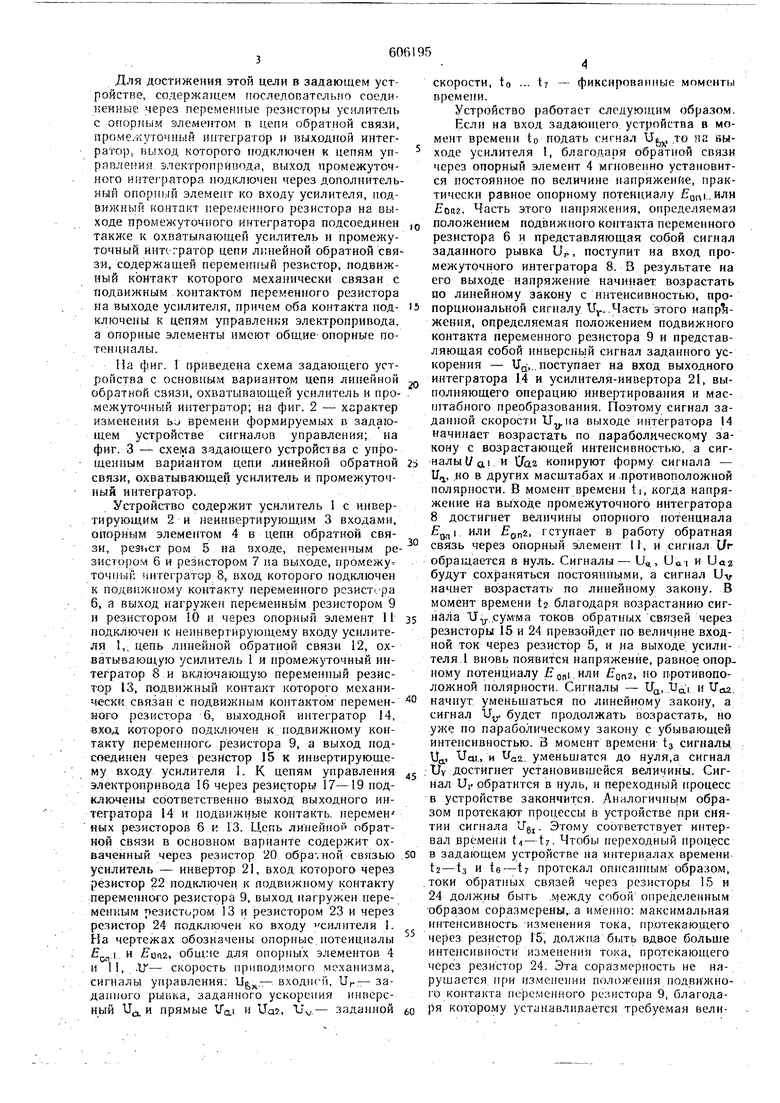
скорости, to .-- t - фиксированные моменты времени.
Устройство работает следуюмдим образом. Если на вход задающего устройства в момент времени U подать сигнал UE,,., то на выходе усилителя {, благодаря обратной связи через опорный элемент 4 мгновенно установится постоянное по величине напряжение, практически равное опорному потенциалу .или Яонг, Часть этого напряжения, определяемая положением подвижного контакта неременного резистора 6 и представляющая собой сигнал заданного рывка Up, поступит на вход промежуточного интегратора 8. В результате на его выходе напряжение начинает возрастать по линейному закону с интенсивностью, пропорционалыюй сигналу U. .Часть этого напр жения, определяемая положением подвижного контакта переменного резистора 9 и представляющая собой инверснь Й сигнал заданного ускорения - UQ,.. поступает на вход выходного интегратора 14 и усилителя-инвертора 21, выполняющего операцию инвертирования и мас(лтабного преобразования. Поэтому сигнал заданной скорости Uy,ia выходе интегратора 14 начинает возрастать по параболическому закону с возрастающей интенсивностью, а сигналы1/ 11 и Оаг копируют форму сигнала - и, но в других масщтабах и.противоположной полярности. В момент времени ti, когда напряжение на выходе промежуточного интегратора 8 достигнет величины опорного потенциала fg 1 или Ядлй, гступает в работу обратная связь через опорный элемент 11, и сигнал Уг обращается в нуль. Сигналы - U, Ua i и Uez будут сохраняться постоянными, а сигнал Uv начнет возрастать по линейному закону. В момент времени t благодаря возрастанию сигнала Ц.у-.сум-.ма токов обратных связей через резисторы 15 и 24 превзойдет по величине входной ток через резистор 5, и на выходе; усилителя 1 вновь появится напряжение, равное опорному потенциалу Яоп). или ., но противоположной полярности. Сигналы - н Uoz. начнут уменьшаться по линейному закону, а сигнал и будет продолжать возрастать, но уже по параболическому закону с убывающей интенсивностью. 3 момент времени ta сигналы, UCL. Uai, и Ud2.. уменьщатся до нуля,а сигнал Uy достигнет установившейся величины. Сигнал и,- обратится в нуль, и переходный процесс в устройстве закончится. Аналогичньш образом протекают процессы в устройстве при снятии сигнала Ug,. Этому соответствует HtfTepвал ,времени t4-t. Чтобы переходный процесс в задающем устройстве на интервалах времени t2 - ta и ie-t протекал описанным образом, токи обратных связей через резисторы 15 и 24 должны быть ..между собой определенным образом соразмерены,, а HMejfuo: максимальная интенсивность изменения тока, пр.отекающего через резистор 15, должн..а быть вдвое больше интенсивности изменения тока, протекающего через резистор 24. Эта с,орйзмер {ость не нарущается при изменении положения подвкжного контакта переменного резистора 9, благодаря которому устанавливается требуемая величина ускорения приводимого механизма. При этом отно1иение сопротивлений переменного резистора 9 и резистора 10 определяет диапазон регулирования ускорения. Эта соразмерность не нарушается и при изменении положения механически связанных подвижных контактов секций переменных резисторов 6 и 13, благодаря которому устанавливается требуемая величина рывка приводимого механизма, так как отношения сопротивлений переменного резистора 6 и резистора 7, переменного резистора 13 к резистора 23, определяющие диапазон регулирования рывка, приняты равными. Чтобы усилитель - инвертор 21 при максимальной величине сигнала - и.и минимальной величине сигнала U,. не заходил в зону насыщения, сопротивления резисторов 22 и 20 приняты в таком же отношении. Таким образом, в устройстве обеспечивается возможность независимой регулировки вручную ускорения и рывка приводимого механизма, что существенно упрощает настройку системы на требуемый режим. Указанная соразмерность токов обратных связей в задающем устройстве не нарушается также и при изменении, величины опорных потенциалов ЕОП) и Е(зпг. Поэтому, воздействуя; на эти потенциалы, можно осуществлять в функции необходимых параметров автоматическую коррекцию ускорения и рывка при-оодимого механизма, что расширяет возможность системы управления, придавая ей адаптивные свойства, Закон изменения сигнала U совпадает с L- .-.. желаемым, т. е. оптимальным законом изменения скорости Цприводимого механизма. Однако, если к цепям управления электропривода 16 подключить только этот сигнал, он будет отработан с погрешностями,, пропорциональными заданным ускорению и рывку, т. е. за. кон изменения скорости IJ будет отличаться от оптимального. Поэтому для компенсации этих погрешностей к цепям управления электропривода 16 подключены сигнялы заданнь1х ускорения и рывка, необходимая величина которых устанавли ается с помо.щью резисторов 18 и 19.Благодаря тому, что эти сигналы вводятся путем подключения к цепям управления электро привода 16 механически связанных подвижных контактов переменных резисторов 6 и 13, при регулировке ускорения и рывка не возникает потребность в изменении резистороа 18 и 19. Таким образом, в устройстве обеспечивается формирование близкого к оптимальному закона изменения скорости приводимого механизма. Если цепи управления электропривода 16 имеют инвертирующий и неинвертирующий входы или по крайней мере два независимых входа, то цепь линейной обратной связи может быть упрощена (фиг. 3) за счет исключения усилителя-инвертора 21, т;ак как отпадает необходимость инвертировать сигнал-Оц В упрощенной цепи линейной обратной связи резистор 23 выбирается таким образом, чтобы отношение максимальной величины сопротивления переменного резистора 13 к результирующему сопротивлению резисторов 23 и 24 сохранялось таким же, как и отношение сопротивлений переменного резистора 6 и резистора 7. Формула изобретения Задающее устройство для электропривода, содержащее последовательно соединенные через переменные резисторы усилитель с опорным элементом в цепи обратной связи, промежуточный интегратор и выходной интегратор, выход которого подключен к цепям управления электропривода, отличающееся тем, что, с целью формирования закона изменения скорости, близкого к оптимальному и упрощения настройки электропривода на требуемый режим, выход . промежуточного интегратора подключен через дополнительный опорный элемент ко входу усилителя, подвижный контакт переменного резистора на выходе промежуточного интегратора подсоединен также к охватывающей усилитель .., -.- а л и промежуточный интегратор цепи линейной обратной связи, содержащей переменный резистар, подвижный ко 1такт которого связан с подвижным контактом переменного резистора на выходе усилителя, причем оба контакта подключены к цепям управления элек.-„,-. . тропривода, а опорные элементы имеют общие опорные потенциалы. Источники информации, принятые во внимание при экспертизе: 1. AEgf Mitteilungen, 1967, № 5, с. 2602 Патент Великобритании № 1.158.144, кл. G 3 R (И 02 Р 5/00), 1969.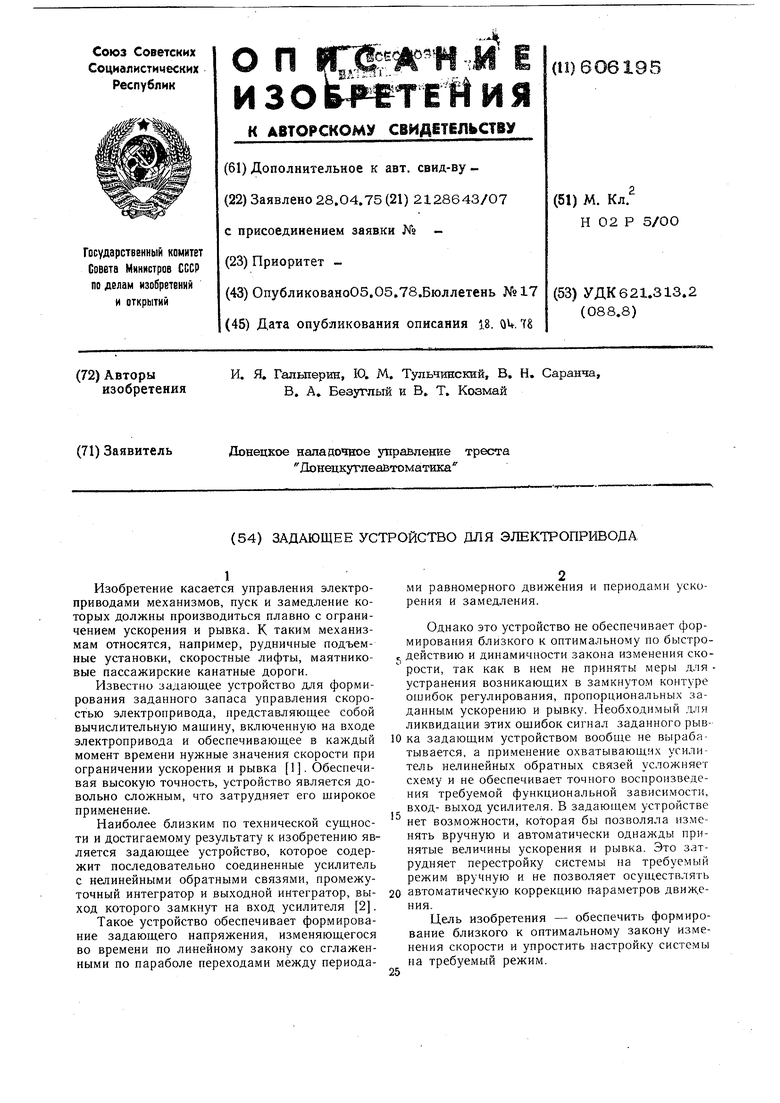

| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство для электропривода | 1984 |
|
SU1248021A2 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1987 |
|
SU1417143A2 |
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |
| Устройство для управления электроприводом | 1983 |
|
SU1107240A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1984 |
|
SU1230956A1 |
to tt t, t,ta tf s t,
Фиг.2
tfai.S
