i
1(Л
оо
00
О5
Изобретение относится к машиностроению, а именно к робототехнике, и может быть испо тьзовано в различных областях техники для автоматизации вспомогательных операций при механической обработке.
Целью изобретения является упрощение конструкции и переналадки робота за счет повышения точности регулировки подвижных элементов.
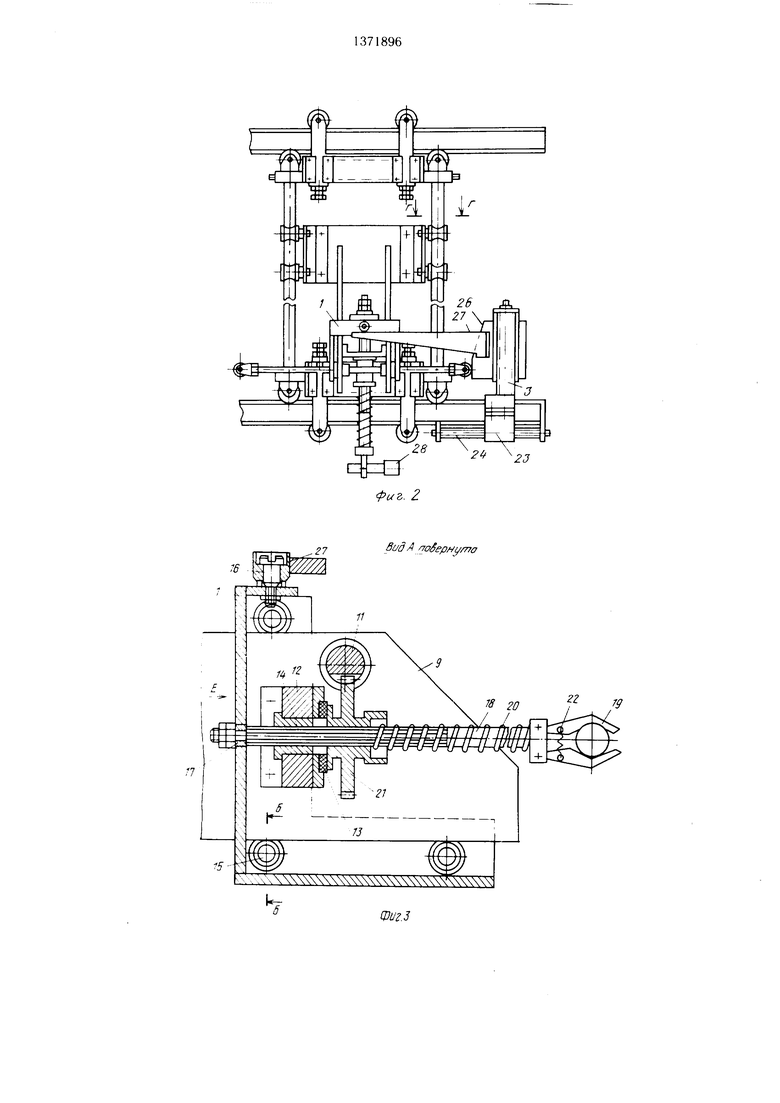
На фиг. 1 изображена установка промышленного робота при обслуживании пер- вого станка, общий вид; на фиг. 2 - то же, при обслуживании второго станка; на фиг. 3 вид А на фиг. 1; на фиг. 4 -- разрез Б -Б на фиг. 3; на фиг. 5 - разрез В- В на фиг. I; на фиг. 6 - разрез Г Г на фиг. 2; на фиг. 7 - разрез Д-Д на фиг. 1; на фиг. 8 - вид Е на фиг. 3.
Робот содержит механизмы продольного и вертикального перемещений, подвижный корпус I, механическую руку с механиз- мо.м поворота, регулируемые передний 2 и задний 3 упоры.
ЛАеханизм продольного перемещения состоит из каретки 4, в которую входят две вертикальные колонны, выполненные в виде цилиндрических направляющих, связанные поперечинами.
На торцах вертикальных направляющих каретки 4 смонтированы роликовые опоры 5, а на поперечинах закреплены с возможностью регулировки с помощью винтов роликовые опоры 6, опирающиеся на горизонтальные направляющие 7.
Механизм вертикального перемещения содержит каретку 8, на лицевой поверхности которой жестко закреплены ребра 9, выполненные в виде вертикальных направляющих.
Роликовыми опорами 10 каретка 8 устройства вертикального перемещения рается на вертикальные колонны каретки 4, а ребра 9, в которые запрессованы соос- но расположенные втулки для установки зубчатой рейки 11 с роликами, использу- ются в качестве вертикальных направляющих подвижного корпуса 1.
Между ребрами 9 каретки 8 закреплена дополнительная опорная плита 12 с неподвижно установленными фрикционной щайбой 13 и втулкой 14.
Подвижный корпус 1 содержит роликовые опоры 15, взаимодействующие с ребрами 9 каретки 8, каток 16 и втулку 17.
Механическая рука состоит из стержня 18, на вне1нней стороне которого нарезаны шлицы, и схвата 19, шарнирно закрепленного на его торце. На стержне 18, который нодвижно установлен во втулках 14 и 17, расположена пружина 20 сжатия, воздействующая на зубчатое колесо 21 механизма поворота, закрепленное подвижно шлицевым отверстием за наружную щли- цевую поверхность стержня 18.
Колесо 21 кинематически связано с рейкой 11 зубчато-реечного механизма пово
5
5
0
0
0
5
0
5
5
0
рота и опирается на фрикционную щай- бу 13.
Схват 19 снабжен пружиной 22 растяжения. Передний 2 и задний 3 упоры имеют салазки 23 со стойками, на которых выполнены вертикальные направляющие 24 в виде «ласточкиного хвоста, копиры и крон- щтейны.
Посредством салазок 23 соответствующие упоры устанавливаются по краям нижней горизонтальной направляющей 7 и с помощью винтов 25 осуществляется их регулировка в горизонтальном направлении.
Вертикальные направляющие 24 используются для установки с помощью винтов 25 копиров и закрепленных на них кронштейнов. Каждый из копиров имеет наклонную рабочую поверхность 26, а кронщтейн - горизонтально расположенную опорную поверхность 27.
Робот снабжен задающим устройством (не показано) и используется для обслуживания двух токарных станков с числовым программным управлением (ЧПУ), на которых обрабатывается деталь 28 типа станочных конусов с двух торцов в несколько переходов.
Задающее устройство, за которое закреплена каретка 8, перемещается я плоскости горизонтальных направляющих 7 в различных направлениях по заданной программе, согласованной с работой обслуживаемых токарных станков с ЧПУ. Движение задающего устройства посредством перемещающихся во взаимно перпендикулярных направлениях кареток 4 и 8 передается механической руке.
Настройка робота на работу с определенными моделями станков осуществляется путем составления программы движения задающего устройства и перемещением упоров 2 и 3, а также копиров и кронштейнов с помощью винтов 25 соответственно в горизонтальном и вертикальном направлениях.
В исходном положении каретка 4 устройства продольного перемещения остановлена между обслуживающими станками, а каретка 8 устройства вертикального перемещения - в крайнем верхнем положении, подвижный корпус 1 под действием усилия пружины 20 сжатия опирается об опорную плиту 12, при этом схват 19 закрыт, а рейка 11 механизма поворота - в крайнем левом положении.
После обработки деталей на станках задающее устройство перемещается в сторону первого станка. Движущаяся от задающего устройства каретка 8 переводит каретку 4 в крайнее левое положение, при этом схват 19 механической руки располагается вверху напротив зажатой кулачками патрона, частично обработанной детали 28.
Продолжая движение, каретка 8 роликовыми опорами 10 перемещается по непод
3
вижным колоннам 4 вниз. Во время движения вниз ролик зубчатой рейки I 1 механизма поворота взаимодействует с наклонной рабочей поверхностью 26 копира переднего упора 2 и при перекатывапп ролика по рабочей поверхности рейка 11 сдвигается вправо.
Движение рейки И передается шестерне 21, которая разворачивает схват 19, выставляя его по оси центров обслуживающего станка.
Вследствие движения каретки 8 и соприкосновения развернутого схвата 19 с деталью 28 последний, растягивая пружину 22, раскрывается и обхватывает деталь.
После зажатия схватом 19 детали 28 стер- жень 18 механической руки останавливается при движуп1ейся вниз каретке 8. Остановка стержня 18 и схвата 19результат сонрикосиовения катка 16 подвижного корпуса 1 с заранее выставленной горизонтальной опорной поверхностью 27 кронштейна переднего упора 2.
В результате взаимодействия катка 16 с соответствующим крон1нтейпом ()станав,1и Бается и подвижный корпус 1.
Вследствие движения вниз каретки 8 при остановленном нодвижном корпусе 1 пружина 22 сжимается, а ролики роликовых опор 15 перекатываются по ребрам 9 в виде направляюп их каретки 8.
За время остановки схвата 19 кулачки, зажимающие деталь 28, расходятся, а затем, изменив направление своего движения, каретка 8 при движун1,ейся . тке 4 пере- меп1ает схват 19 с деталью в сторон второго станка.
При движении каретки 8 в горизонтальном направлении деталь 28 выходит из зоны де11ствия кулачков нат1М)на, при этом каток 16 ис рекатывается по го)из()нтальной онорной поверхности 27 кронн1тейна.
Во время движения каретки 8 в направлении второго станка п()ужииа 20 жимается всле;1ствие удаления кагка Hi от опорной поверхности 27.
Усилием пружины 20 сжатия шестерня 21 прижимается к фрикционной иайбе 13 и между их торцами при повороте стержня 18 возникают силы трения. Силы треиия препятствуют повороту схвата 19 с деталью 28 и фиксируют механическую руку в повернутом положении. До подхода робота к второму станку кулачки патрона последнего разводятся, а -обработаннная деталь специальным устройством переносится в тару.
Движение каретки 8 в сторону второго станка передается каретке 4, которая останавливается в крайнем правом положении, а сама продолжает двигаться вниз. При движении каретки 8 вниз и взаимодействии ро.чика рейки 1 I с наклонной рабо- чей поверхностью 26 копира заднего упора 3 механическая рука с деталью 28 поворачивается на 180 вследствие перемещения влево рейки 11 механизма поворота.
0
5
0
0
Q
5
5
lloBOpOTOM механической уки достигается переориентация дета.чи, при которой ее ось )асиолагается пара.члельно оси центров обслуживающего станка, а обработанный торец повернут в CT(jpony патрона.
Продо;1Жая движение, 8 перемещает нереориентироваин К) механическ ю вниз до совмещения оси дета, 1н 28 с осью патрона, где она останавливается напротив раскрытых ку.тачков пат)она.
Остановка детали при движупим1ся каретке 8 резу.тьтат еоприкоспсиимшя катка 16 с О11О11НОЙ поверхнс)стьк) 27 крон- uiTcibia заднего унора 3.
Затем каретка 8, изменив Н1. ртика.тьное движение на горизонтальное, с помощью ка|)етки 4 вводит детал1, 28 и зон де11ст- вия кулачков.
Кулачки патрона зажимают дета,,ть 28, а ycrpoiicTBa робога возвращают ся в исходное положение.
Вс.тедствие 11е11одвиж юсти зажатой кулачками патрона детали 28 при возвращаю- П1.емся в исходное по.южс ние подвижпом корпчсе 1 схват 19, растягивая 111)ужин 22. раскрывается и пустым возвраи1астч-я в исходное пслтожсние.
Формула изобретения
11)омып1ленный робот, содержаши смонтированную на подвижном корпусе меха ническую , кинемагически связанною с механизмами г ори.юитального и 1 ерти- кального перемещений, кажд1 1Й из которых снабжен кареткой с роликовыми опорами, неподвижные горизонтальные нанравляюнще, подвижные вертикальные направляющие, расположенные на каретке механизма вертикального перемещения, и механизм поворота Гуки, отличающийся тем, что, с пе,чьк) упрощения конструкции и переналадки робота за счет повьинения точности регулировки подвижных элементов, каретка механизма вертикального неременхення руки снабжена дополнительной опорной плитой, жестко закрепленной на вертикальных направляющих и расположенной внутри нод- вижного корпуса, при этом продольная ось механической руки совмещена с вертикальной - оськ: подвижного корпуса и с осью дополнительной онорной плиты, а механизм поворота выполнен в виде зубчато-реечной передачи, зубчатое колесо которой установлено соосно механической руке с возможностью движения вдоль нее и связано посредством соосной этому колесу фрикционной шайбы и пружины сжатия с донол- нительной опорной плитой, а на обоих торцах зубчатой рейки этой передачи смонтированы ролики, кине.матически связанные с дополнительно введенными регулируемыми конирами, установленными на ненодвижных горизонтальных направляюн1их, причем на подвижном корпусе установ, 1ен дополните,ть- ный каток, взаимодействующий с ненод вижным и горизо1ггальными направляющими.
2ff
2J

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Промышленный робот | 1976 |
|
SU603577A1 |
| Промышленный робот | 1988 |
|
SU1530436A1 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Устройство для автоматической смены инструментов | 1990 |
|
SU1787739A1 |


Изобретение относится к машиностроению, а именно к робототехнике, и может быть исноль.човано в различных областях техники для автоматизации вспомогательных операций нри механической обработке. Це.чью изобретения является упрощение конструкции и переналадки робота за счет повы1нения точности регулировки подвижных ылементов. Движение задающего устройства робота передается каретке 8 механизма вертикального перемещения, которая с помощью роликовых онор 10 движется вдоль каретки 4. которая в свою очередь перемещается вдоль горизонтальных направляющих 7. Каретка 4 останавливается в одном из крайних положений, а каретка 8 продолжает движение вниз. Вследствие взаимодействия роликов зубчатой рейки I с поверхностями 26 регулируемых копиров происходят поворот схвата 19. зажим заготовки. Во время остановки механической руки происходит обслуживание соответствующего оборудования. 8 ил.
фиг. 2
Bad 7oSeflHi//77a
(Риг.з
фиг.
24
25
В-д
ф1/г.
Фиг.б
фиг .7
Вид Е
Фиг.8
| Авторское свидетельство С(,СР № 603577, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
