1
Изобретение относится к станкостроению в частности к устройствам для транспортировки заготовок и изделий, и может найти применение при обслуживании патронно-центровых станков с ЧПУ.
Известен автооператор, содержащи каретку с механизмом захвата, выполненным в виде кинематически связанных между собой реек, и привод механизма захвата l3 .
Однако устройство предназначено для зажима изделия только за наружную поверхность, что снижает диапазон станков, обслуживаемых автооператором. Отсутствует прижим изделия к базовой поверхности патрона станк при отсутствии заднего центра.
Цель изобретения - расширение тенологических возможностей за счет обеспечения зажима изделия за внутренний и наружный диаметр и прижима изделия к базовой поверхности станка.
Цель достигается тем, что автооператор снабжен дополнительной реечной передачей и резьбовой парой, выполненной в виде штанги с гайкой, неподвижно установленной на этой штанге, причем штанга и рейка дополнительной реечной передачи кинематически связаны с приводом механизма захвата, а рейки механизма захвата снабжены эксцентриковыми роликами,
прижимами и толкателями, установленными с возможностью продольного и осевого перемещения относительно их осей.
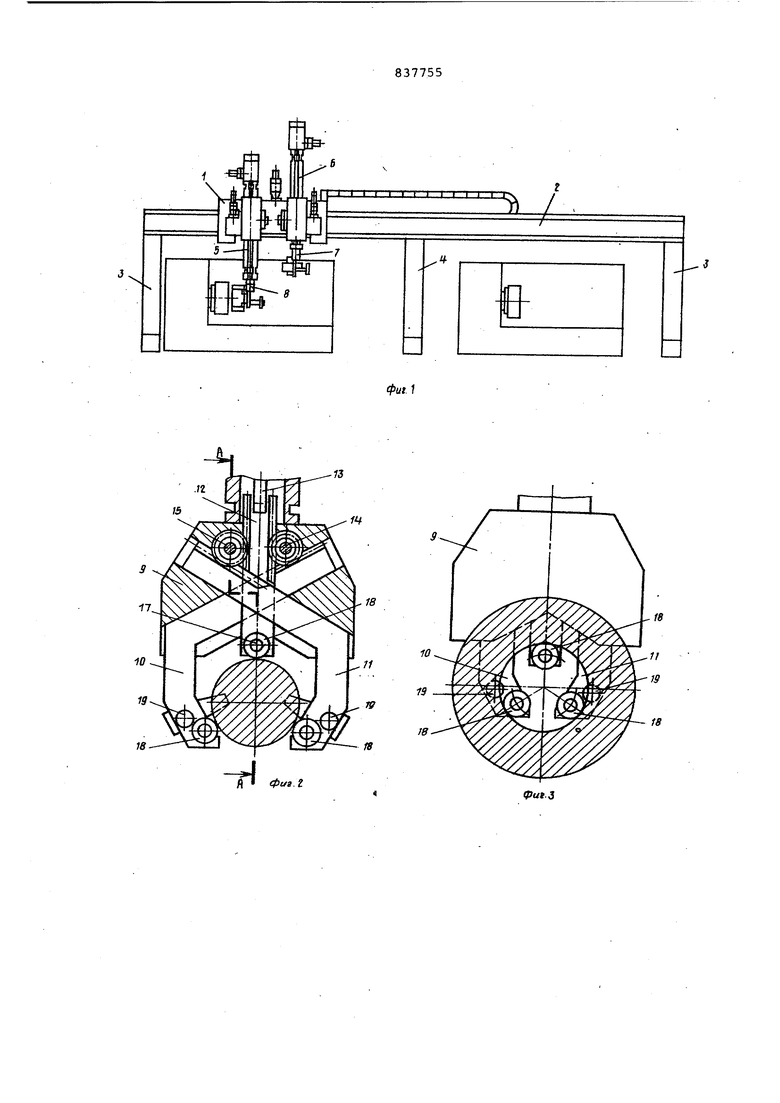
На фиг.1 схематически изображен
автооператор, общий вид} на фиг.2 и ,3 - механизм захвата/ на фиг.4 разрез А-А на фиг.2; на фиг. 5 - . привод механизма saxBaTaJ на фиг.6 разрез Б-Б на фиг.5.
Автооператор состоит из каретки 1 (фиг.1), установленной на траверсе 2, расположенной над станками на колоннах 3 и 4. На каретках 1 установлены две руки 5 и 6 для заготовки готовых изделий, на которых р азмещены захваты 7 и 8. Каждая рука имеет возможность вертикального перемещения и поворота относительно горизонтальной оси. Захваты 7 и 8 содержат корпус 9 (фиг.З и 4), присоединенный к рукам 5 и 6, в котором размещаются в пазах разной глубины рейки 10, 11 и 12. Двухсторонняя рейка 12 с помснцью втулки 13 соединена
с приводом механизма захвата и через
зубчатые колеса 14 и 15 кинематически Связана с рейками 10 и 11, Оси зубчатых колес 14 и 15 установлены в корпусе 9 и крышке корпуса 16. Ки.нематическая связь реек 10, 11 и 12 с помощью зубчатых колес 14 и 15 обепечивает синхронное перемещение элементов механизма захвата и самоцентрирование захвата во всем диапазоне диаметров зажимаемых изделий. На рейках 10 и 11, выполненных Г-образными /-крепляются эксцентриковые оси 17 с роликами 18, которые контактируют при зажиме с поверхностями заготовок а также смонтированы прижимы 19, предназначенные для заготовок и готовых изделий, зажимаемых за внутренний диаметр, и толкатели 20 с упорами 21 (.4) для заготовок, зажимаег.щлх за наружный диаметр. На двухсторонней рейке 12 закреплена ось 17 с роликом 18. Прижим 19 и толкатель 20 поджаты пружинами 22.Толкатели 20 имеют возможность переставляться по втулке 23 при зажиме заготовок разной длины за наружный диаметр,
Привод захвата .осуществляется через двухстороннюю рейку, 12 от гидромотора 24 (фиг.5) через зубчатую передачу 25 и 26. Шестерня 25 смонтирована на гайке 27, установленной на подшипниках 28 в корпусе 29. Гайка 27 с помощью внутренней резьбы связана с резьбовой штангой 30; на которой установлена шестерня 31, взаимодействующая с рейкой 32. Нижний конец штанги 30 с помощью подпятника 33 соединен с втулкой 13 и рейкой 12. Рейка 32 смонтирована на штоке гидроцилиндра 34 и имеет возможность перемещаться в отверстии корпуса 29. На рейке, 32 установлены упоры 35 для взаимодействия с конечными выключа телотли (не показаны).
В исходном положении каретки 1 рука, 5 поворачивается и перемещается вниз до захвата заготовки из накопителя. При заишме заготовки за внутреннюю поверхность, рейки 10, 11 и 12 сведены к центру, а при зажиме за наружную поверхность разведены от iteHTpa. Затем при вращении гидромотора 24 через зубчатую пару 25 и 26 при,ходит во вращение гайка 27. При этом штанга 30, будучи ограничена от вращения рейкой 32, вывинчивается (или ввинчивается) из втулки гайки 27, перемещаясь вдоль своей оси и перемещая рейку 12, и через зубчатые колеса 14 и 15 рейки 10 и 11..Происходит захват заготовки. После этого рука поднимается вверх и поворачивается в сторону станка. Каретка 1 перемещается по траверсе 2 к станку, где рука б
производит захват заготовки в патроне станка в той же последовательности и выводит заготовку из зоны обработки. После перемещения каретки 1 в новую позицию рука 5, опускаясь подает заготовку в патрон станка. Затем от гидроцилиндра 34 через рейку 32 и шестерню 31 происходит по|Ворот штанги 30, которая вывинчивается (или ввинчивается) из гайки 27, ограниченной от вращения гидромотором 24 через шестерни 25 и 26. При движении вдоль своей оси штанга 30 перемещает рейки захвата 10, 11 и 12. Происходит отвод роликов 18 от заготовки на величину, необходимую для компенсации неточности заготовки. Заготовка остается между роликами 15, толкателями 20 (или прижимами 19 при зажиме за внутренню поверхность). При перемещении каретки 1 в сторону к патрону станка толкатели 20 через упорь 21 (или прижимы 19) контактируют с торцовой поверхностью заготовки, прижимая ее к базовой поверхности патрона, а ролики 18 не мешают базированию детали по торцу. Происходит зажим патрона. Каретка 1 отходит от патрона по траверсе 2, рука 5 поднимается вверх, гидроцилиндр 34 и захват приводятся в исходное положение Каретка 1 перемещается по станку, в котором рука 6 производит, разгрузку заготовки в том же порядке. Цикл повторяется.
.Предлагаемое изобретение расширяет технологические возможности оснастки при механообработке изделий.
Формула изобретения
Автооператор, содержащий каретку с механизмом захвата, выполненным в виде кинематически связанных межд собой реек, и привод механизма захвата, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительной реечной передачей и резьбовой парой, выполненной в виде штанги с гайкой, неподвижно установленной на этой штанге, причем штанга и рейка дополнительной реечной передачи кинематически связаны с приводом механизма захвата, а рейки механизма захвата снабжены эксцентриковыми роликами, прижимами и толкателями, установленными с возможностью осевого и продольного перемещения относительно их осей.
Источники информации, принятые во внимание при экспертизе
1. -Авторское свидетельство СССР № 632547, кл. В 23 Q 7/04, 1977.
i Л I I I I I I I j I
л /

| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1969 |
|
SU344701A1 |
| Автооператор | 1977 |
|
SU632547A1 |
| Линия для изготовления доньев бочек | 1983 |
|
SU1147566A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Донносшивной станок | 1990 |
|
SU1764999A2 |
| Грейферное подающее устройство | 1983 |
|
SU1138213A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Устройство для нанесения покрытий | 1982 |
|
SU1070221A1 |
| Манипулятор | 1974 |
|
SU547336A1 |

13
18
fl фиг.г
18
J8
(put.3
