интерполяции, второй вход первого и четвертого элементов И соединен с С-входбм триггера и с первым входом блока линейной интерполяции.
3. Интерполятор по п. 1, отличающийся тем, что блок линейно-круговой интерполяции содержит первый элемент И, первый элемент задержки, первьгй реверсивный счетчик и второй элемент И, а также последовательно соединенные второй реверсивный счетчик, третий элемент И, сумматор, триггер, четвертьй элемент И и второй элемент задержки, выход которого соединен с первым входом второго реверсивного счетчика, второй вход которого подключен к третьему входу блока линейно-круговой интерполяции, а третий вход - к входу блока линейно-круговой интерполяции и к первому входу первого реверсивного счетчика, второй вход - через первый элемент задержки с выходом первого элемента И, первьш вход которого подключен к инверсному выходу триггера, второй вход - к второму входу четвертого элемента И, к С -входу триггера и к входу блока линейно-круговой интерполяции, выход первого элемента И подключен к первому входу второго элемента И, второй вход которого соединен с выходом первого реверсивного счетчика, а (ВЫХОД - с вторым входом сумматора, а выход четвертого элемента И - к второму входу третьего элемента И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Интерполятор для систем программного управления | 1977 |
|
SU658528A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
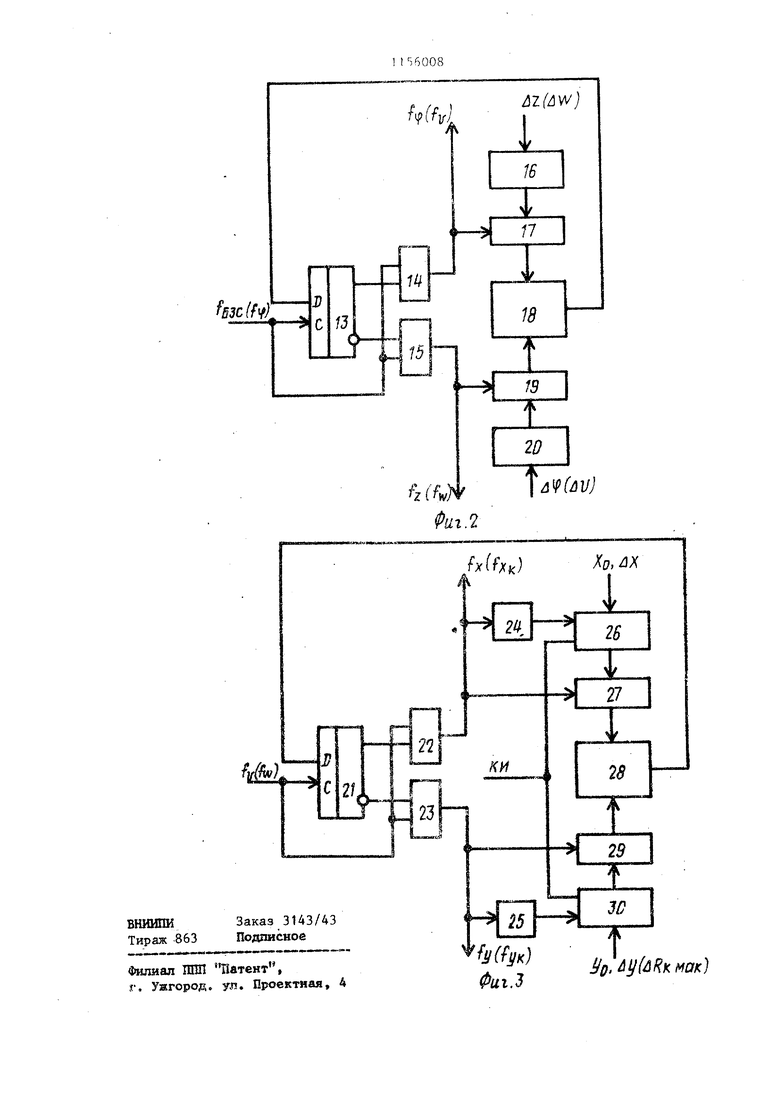
МНОГОКООРДИНАТНЫЙ ЛИНЕЙНОКРУГОВОЙ ИНТЕРПОЛЯТОР, содержащий блок задания скорости, счетчик импульсов и первый блок линейной интерполяции,, последовательно соединенные блок умножения и блок деления, а также первый и второй блоки линейно-круговой интерполяции, первыг-ш выходами подключенные соответственно к первым входам первого и второго сумматоров, а вторыми выходами - к вторым входам второго и йервого сумматоров соответственно, отличающийся тем, что, с целью раслшрения функциональных возможностей интерполятора за счет обеспечения отработки контуров по трем координатам одновременно с коррекцией в плоскости, .в него введены третий и четвертььй суммато1зы, второй блок линейной интepпoляu «, первый вход которого соединен с выходом блока задания скорости и с первым входом счетчика импульсов, второй вход - с выходом третьего сумматора и с первьп-i входом четвертого сумматора,третий вход - с первь м входом устройства и с вторыг- входом четвертого Jii- Xwili сумматора, первый выход второго блока линейной интерполяции подключен к первому выходу устройства, второй выход - к первому входу первого блока линейной интерполяции, второй вход которого соединен с вторым входом устройства и с первым входом третьего сумматора, третий вход - с выходом блока деления и с вторым входом третьего сумматора, а первый и второй выходы первого блока линейной интерполяции подключены к первым входам первого и второго блоков линейно-круговой интерполяции соответственно, причем третьи входы уст- ( ройства соединены с вторыми входами первого блока лиЯейно-круговой интерполяции, четвертые входы - с входами блока умножения, выходы первого и второго сумматоров подключены к 1второму и третьему выходам устройства, а выход счетчика импульсов - к четвертому выходу устройства. 2. Интерполятор по п. 1, отличающийся тем, что, блок О) линейной интерполяции содержит первый элемент И, первый регистр и второй элемент И, а также последователь00 но соединенные второй регистр, третий элемент И, сумматор, триггер и четвертый элемент И, выход которого соединен с вторым выходом блока линейной интерполяции и с вторым входом третьего элемента И, инверсный выход триггера через первый элемент И подключен к выходу блока линейной интерполяции и к первому входу второго элемента И, выход которого соединен с вторым входом сумматора, а второй вход через первый регистр с третьим входом блока линейной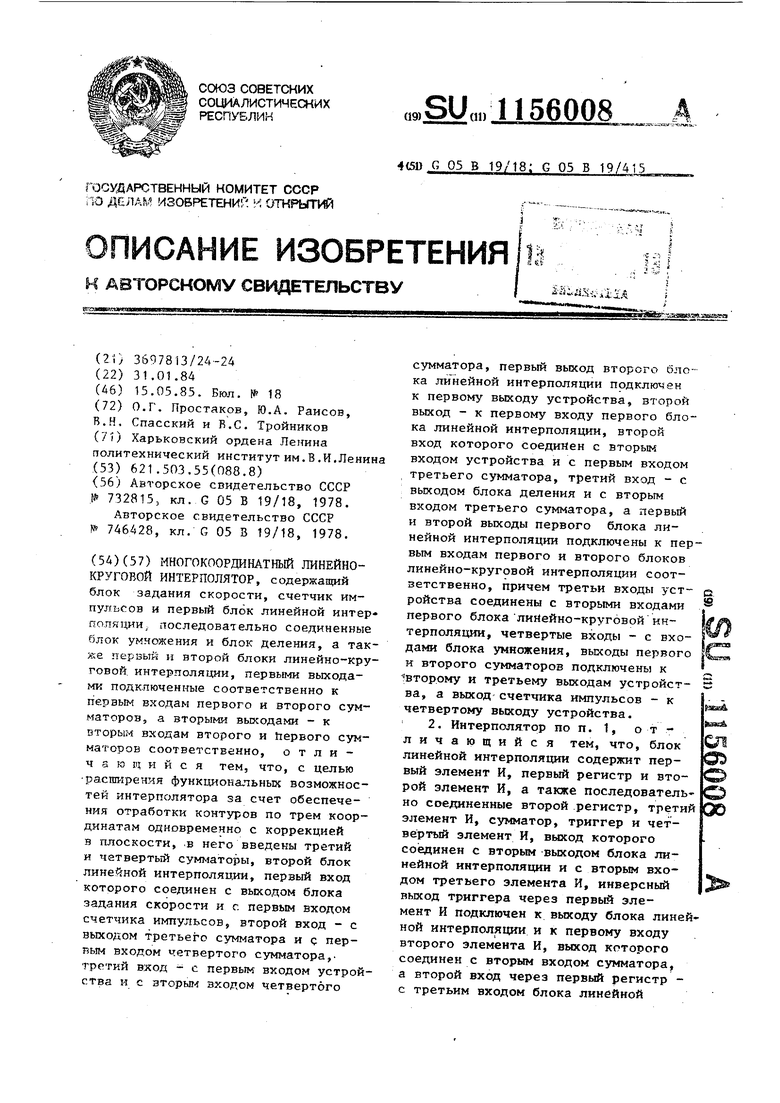
I
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками.
Цель изобретения расширение функциональных возможностей интерполятора за счет обеспечения отработки контуров по трем координатам одновременно с коррекцией в плоскости.
В предлагаемом устройстве второй блок линейной интерполяции выполняет
две функции; функцию образования автономного выхода по третьей координате трехмерного пространства и функцию задания суммарной импульсной последовательности на две первые координаты, которые в процессе интерполяции могут корректироваться, причем отношение частот импульсных последовательностей по третьей (автономной) координате к сумме первых двух равно отношению приращения по третьей координате к сумме приращений по первьш двум координатам на участке интерполяции. Таким образом, введенный блок линейной интерполяции используется и как задатчик частоты импульсных последовательностей, и как генератор сигналов приращений по одной из координат трехмерного пространства.
Кроме того, введение двух одноразрядных сумматоров, первый из которых попадает на введенный блок линейной интерполяции сумму приращений по RBYM координатам и осям вектора коррекции на участке интерполяции, а второй - на счетчик перемещений общуто сумму приращений по всем координатам на участке интерОполяции, позволило упростить ту часть устройства, которая определяет моментокончания интерполяции участка (в прототипе используется два счетчика, выходы которых сое5динены с двухвходовой схемой совпадения, в предлагаемом устройстве при отсутствии сумматоров потребовалось бы три счетчика и трехвходовая схема совпаления), Изъятие схемы совпа0дения и счетчиков, подключенных к выходам первого блока линейной интерполяции, привело к тому, что этот блок интерполяции используется как синхронизатор вращения радиус-векто5ра текущей точки отработки расчетного контура в плоскости и вектора коррекции контура.
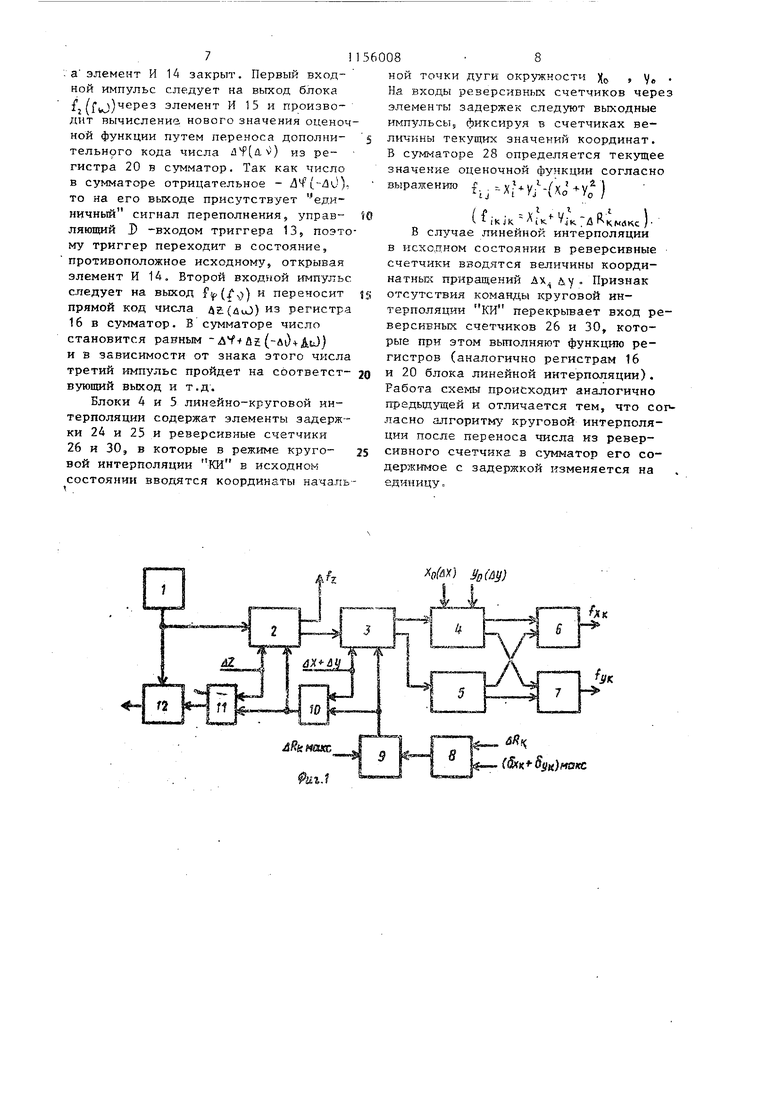
Указанные отличительные признаки устройства обеспечивают ему до0полнительные возможности - трехкоординатную интерполяцию с коррекцией контура по квум координатам и принципиально новую (при од1-таковых объемах блоков линейно-круговой интерполяции и подключении их выходов автономно на выходы устройства) много координатную интерполяцию в пространстве до пяти координат. На фиг. 1 представлена схема интерполятора; на фиг. 2 - схема блока линейной интерполяции; на фиг. 3 - схема блока линейно-круговой интерполяции. Интерполятор (фиг. 1) содержит блок задания скорости 1, необходимый для поддержания заданной скорости, блоки линейной интерполяции 2 и 3, один из которых организует выход по третьей координате/ а другой распределяет импульсную последовательность на блоки линейно-круговой интерполяции Д и 5, один из них образует вбкод по первой и второй координате без коррекции, а другой - выход по координатам коррекции, сумматоры 6 и 7, на выходе которых образуется скорректированный контур в плоскости, блок умножения 25 8 и блок деления 9 приводят максилмальное значение суммы приращений контура коррекции (5хи - ул) виду SXK хк соответствующему установленному радиусу коррекции ЛЯ. , сумматор 10, на выходе которого образуется сумма приращений основного контура и контура коррекции ЛХ + л) + сумматор 11, на выходе которого получается полная сумма приращений по трем координатам и ко- чен ординатам коррекции, которая вводится в счетчик 12, вырабатывающий сигнал смены кадра программы. Блок линейной интерполяции содержит триггер 13, элементы И 14 и 15, регистр 16, элемент И 17, сумматор 18, элемент И 19, регистр 20. Блок линейно-круговой интерполяции содержит триггер 21, элементы И 22 и 23, элементы задержки 24 и 25, реверсивный счетчик 26, элемент И 27, сумматор 28, элемент И 29, реверсивный счетчик 30.. Блок линейной интерполяции 2 реализует оценочную функцию f,,, где /щ - текущее значение оценочной функции Дг - приращение по третьей координате; г - текущее значение третьей координаты; aY15 UW A ной тер кру где ной пер коо окр « кущ iK. нат сим ции дел ния где У обра сумма приращений по первым двум координатам и координатам коррекции; текущее значение условной координаты, выходные импульсы по которой следуют на вход блока линейной интерполяции 3, реализующего оценочную функцию fniHflWVh-aVv/tr,, -текущее значение оценочной функцииJ -сумма приращений UX + uf по первым двум координатам, -сумм а приращений по координатам коррекции}Vh hi условные координаты, выходные импульсы по которым следуют на входы блоков линейно-круговой ин терполяции А и 5. Блок А реализует два вида оценочфункции: в случае линейной иноляции -:fii AHY -av)(i i в случае овой интерполяции -/,-.(Хо + о), - текущее значение оценочфункции; йХ , Лу - приращения по ым двум координатам; Хо Vo динаты начальной точки дуги жности; X i Yi, текущие зная первой и второй координаты. лок 5 реализует оценочную функuo..L, где f,,iK -тее значение оценочной функцииJ Yj текущие значения коордикоррекции; лК ;цд„- величина макльного значения радиуса коррекпостоянно заложенная в блоке ния 9. Блоки умножений 8 и деле9 реализуют выражение -() ( dR - необходимая величина радиуса коррекции; Miti. Расчетная величина суммы приращений координат коррекции, - сумма приращений координат коррекции, приведенная к необходимой величине радиуса коррекция. стройство работает следующим зом. в блок задания скорости 1 вводит ся с перфоленты код скорости, в бло ;;икейной -1К -арполядии 2 - прираiuSHKe. ПС тсатьсй координате Дг. и умма приращений Дх+ду+6)( , образующаяся на выходе сумматора 10, ,: блок ли1 ейной интерполяции 3 - су гу приращений по первым двум коорти ;дтак и сумму приращений по координатам коррекции б,, образующуюся на выходе блока деления 9; в блок линейно-круговой интерполяции 4 в случае линейной интерполяции приращения по координа там их , ду 5 в случае круговой интерполяции координаты начальной точ ки дуги окружности Хо Ус. J в сум.аторы 5 и 7 знак суммирования приращенийJ в блок умножения 8 сумму координатных приращений конту для макс ра коррекции мального значения радиуса и необходимую величину коррекции ЛR, Сумма координат приращений контура коррекции для максимального значения радиуса коррекции ((S -t-й - jC ; VK ciK :Df . V 4 дХ + uV сумг- а приращений по первым ко динатам, 9 плоскости которых леж заданная дуга окружности J R - радиус дуги окрузк ности; - максимально возмо ная величина ради са коррекции. С пуском схемы в блоке умножения 8 происходит перемножение (j.. необходимую величину радиуса коррекции uR,; , а в блоке деления 9 - деление полученной вели чины на AR, . На выходе блока 9 образуется величина , соответствующая сумме координатных при ращений контура коррекции для задан ного радиуса коррекции й,ц,. Блок 2 распределяет импульсы, поступающие на его вход с блока зад ния скорости 1, на выход по третьей координате н на вход блока линейной интерполяции 3 в соответствии с отношением Al:( + ,), блок 3 в свою очередь распределяет т пульсы на блоки линейно-круговой 8 интерполяции А и 5 в соответствии с отношением ( ДХ-(-лyj : (хк VK). В блоке линейно-круговой кчтерпог/яции происходит вычислеи -е прираг: 1 НИИ координат ДХ, ау котггура в плос-кости первых двух координат, а в блоке линейно-круговой интерполяции 5 прирашения координат контура коррекции 5у. В соответствии с установленными зг1аками суммирования в блоках 6 и 7 образуются скорректированные выходы первых двух координат i мент окончания отработки определяется счетчиком 12 после прихода на его вход с блока задания скоростт-г числа импульсов, равного полной приращений по всем коордиматам; лх + йу аг.-бд(1- UVK, Блоки 2, 3, 4 и 5 представляют собой блоки линейной и линейно-хруго вой интерполяции, работающие го -нироко распространенному методу оценочной функции. В регистры 16 и 20 в исходном состоянии вводятся величи- . кы приращений и г, д дх + Д S,. + Sys (AW - А X + а ), а 0,. - , а сумматор 18 накопительного типа служит для определения текущего значения оценочной функции -Г „/-С Злет, -1 . ,, KtvT,,-,r, ). менты И 17 и 19 предназначены ,апя переноса чисел из регистров в сут матор. Согласно выражениям оценочной функции f л г. Yt - Л f 2f-{l;vnn а -V,-uV w, элемент И 17 переносит прямой код числа из регистра i6 в . ато; i8 для выполнения действия сложения, а элемент И 19 переносит дополнительный код числа из регистра 20 в сумматор для выполнения действия вычитания. С помощью триггера 13 к двух элементов И 14 к 15 выполнен блок оценочной функции, который в завксимости от знака оценочной функции распределяет входную импульсную последовательность f,.,r на соответствующий выход блока Д{и}), f. ({.j) и определяет очередное значение оценочной функции путем добаБления числа из соответствующего регистра в сумматор. Работа схемы происходит следующим образом. В исходном состоянии в регистры 16 и 20 вводятся величины приращений по коорди.чатам. триггер 13 устанавливается в исходное состояниеJ при котором элемент И 15 открыт.
7
а элемент И 14 закрыт. Первый входной импульс следует на выход блока (fkj)4epe3 элемент И 15 и гфоизводнт вычисление нового значения оценочной функции путем переноса дополнительного кода числа 4(uv) из регистра 20 в сумматор. Так как число в сумматоре отрицательное - ЛЧ(-лО), то на его выходе присутствует единичный сигнал переполнения, управляющий D -входом триггера 13, поэто му триггер переходит в состояние, противоположное исходному, открывая элемент И Н. Второй входной импульс следует на выход fip{/)) и переносит прямой код числа {йиЗ) из регистра 16 в сумматор. В сумматоре число становится равным fi (-йО AiJ) и в зависимости от знака этого числа третий импульс пройдет на соответствующий выход и т.д.
Блоки 4 и 5 линейно-круговой интерполяции содержат элементы задержки 24 и 25 и реверсивные счетчики 26 и 30, в которые в режиме круговой интерполяции КИ в исходном состоянии вводятся координаты началь
08 8
ной точки дуги окружности Хо V На входы реверсивных счетчиков через элементы задержек следуют выходные импульсЫ; фиксируя Б счетчиках величины текущих значений координат. В сумматоре 28 определяется текущее значение оценочной функции согласно выражению . --Х--К/-(Хо Уо )
. МК JK TJK 7л PKMdHC )
В случае линейной интерполяции в исходном состоянии в реверсивные счетчики вводятся величины координатньк приращений Лх &у- Признак
отсутствия команды круговой интерполяции КИ перекрывает вход реверсивньпс счетчиков 26 и 30, которые при этом вьтолняют функцию регистров (аналогично регистрам 16
и 20 блока линейной интерполяции). Работа схемы происходит аналогично предьщущей и отличается тем, что согласно алгоритму круговой интерполяции после переноса числа из реверсивного счетчика в сумматор его содержимое с задержкой изменяется на единицу. о(й) (&Ю i &Kf{ j - fdSfK -ffjfK)(«3«c
| Многокоординатный линейно-круговой интерполятор | 1977 |
|
SU732815A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Многокоординатный линейно-круговой интерполятор | 1978 |
|
SU746428A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
