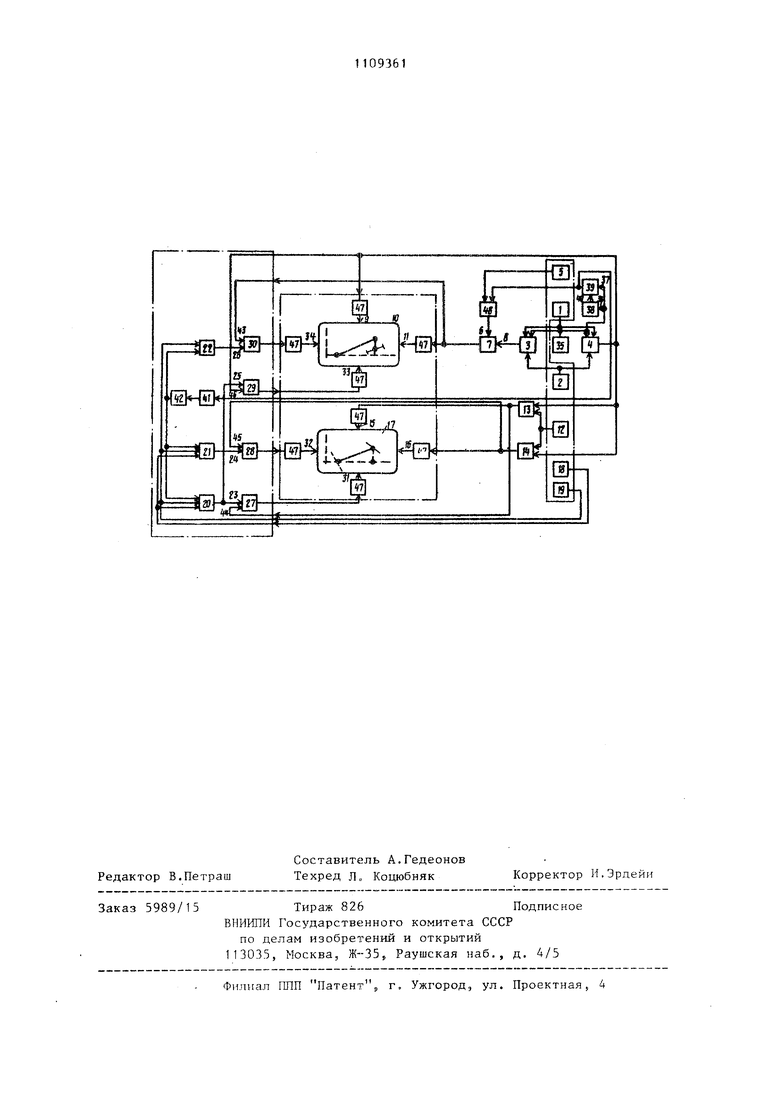
1 Изобретение относится к юдъемно транспортному машиностроению а именно к указателям положения подвижных органов стрелового крана. Известен указатель положения подвижных органов стрелового крана, содержащий датчики длины и угла подъема стрелы, датчик высоты подъе ма груза и формирователи, связанные с развертками осциллографа 1J, Известен указатель положения подвижных органов стрелового крана, содержащий датчики длины и угла подъема стрелы, связанные с формиро вателями проекций стрелы на вертикальную плоскость, датчик высоты подъема груза, соединенный с входом сумматора, второй вход которого связан с выходом формирователя проекций стрелы на вертикальную плоскость, выход второго формирователя соединен с горизонтальной разверткой осциллографа, а выход сумматора подключен к вертикальной развертке осциллографа, а также генератор переменного напряжения и датчик угла поворота платформы, связанный через формирователи проекций стрелы на горизонтальную плоскость с горизонтальной и вертикальной развертками второго осциллографа 2 1. Недостатком известных указа елей является отсутствие изображения на экране осциллографов грузозахватного органа крана с грузом. Цель изобретения - повышение безопасности эксплуатации крана. Указанная цель достигается тем, что указатель снабжен датчиками угла поворота крюка и наклона грузоподъемной траверсы, дополнительными сумматорами и формирователями проек ций грузоподъемной траверсы на верт кальную и горизонтальную плоскости, входы которых подключены к датчикам угла поворота крюка и наклона грузоподъемной траверсы, а выходы соед нены с входами дополнительных сумма торов, а также вторым генератором переменного напряжения и задатчиком длины грузоподъемной траверсы, соед ненными последовательно, и дискрими натором со схеьюй И, входы которых подключены к первому генератору . переменного напряжения, который так же соединен с формирователями проек ций стрелы на вертикальную плоскост причем осциллографы выполнены двухлучевыми, нычод дискриминатора сое12динен с вторым входом схемы И, выход которой связан с первым входом сумматора и входом второго генератора переменного напряжения, а выход задатчика длины грузоподъемной траверсы соединен с входом формирователей проекций грузоподъемной траверсы на вертикальную и горизонтальную плоскости, при этом каждого дополнительного сумматора соединен с соответствующей разверткой второго луча соответствующего осциллографа, а вторые входы дополнительных сумматоров связаны с формирователями проекций стрелы на вертикальную и горизонтальную плоскости. На чертеже изображена функциональная схема указателя. Указатель положения подвижных органов стрелового крана содержит датчики 1 и 2 длины и угла подъема стрелы, связанные с формирователями 3 и 4 проекций стрелы на вертикальную плоскость. Датчик 5 высоть подъема груза соединен с первым входом 6 сумматора 7, второй вход 8 которого связан с формирователем 3. Второй формирователь 4 соединен с входом 9 горизонтальной развертки осциллографа 10, а выход сумматора 7 подключен к входу 11 вертикальной развертки. Датчик 12 угла поворота платформы связан через формирователи 13 и 14 проекций стрелы на горизонтальную плоскость с входами 15 и 16 горизонтальной и вертикальной разверток второго осциллографа 17. Датчики 18 и 19 угла поворота крюка и наклона грузоподъемной траверсы через формирователи 20-22 проекций траверсы на вертикальную и горизонтальную плоскости соединены с входами 23-26 дополнительных сумматоров 27-30, выходы которых связаны с входами 31-34 вертикальной и горизонтальной разверток двухлучевых осциллографов 17 и 10. Выход генератора 35 переменного напрях ения подключен к формирователям 3 и 4 и входам 36 и 37 дискриминатора 38 и схемы И 39. Выход дискриминатора 38 соединен с вторым входом 40 схемы И 39, выход которой связан с первьм входом 6 сумматора 7 и входом второго генератора 41 переменного напряжения, который через задатчик 42 длины грузоподъемной траверсы соединен с входами формирователей 20-22. Второй вхол 43 сумматора iO связан с формирователем 3 через сумматор 7, вторые входы 44-46 сумматоров 27-29 соединены соответстве но с формирователями 13, 14 и 4, Схема содержит блоки 47 согласования и блок 48 задания масштаба. Указатель положения подвижных органов стрелового крана работает следующим образом. Для получения изображения траверсы и груза оператор перед началом работы крана, пользуясь шкалой задатчика 42 траверсы (и груза), задает требуемую длину в форме соот ветствующего сигнала. При перемещении подвижных органов крана изменяются выходные сигнал датчиков 1, 2, 5, 12, 18 и 19, пропорциональные величине перемещений подвижных органов. Сигналы с датчиков 1 и 2 поступа ют на формирователи 3 и 4 и преобразуются в сигналы, пропорциональные проекциям стрелы на две ортогональные оси в вертикальной плоскост на которые поступает сигнал с генератора 35, который модулирует сигна лы, пропорциональные проекциям стре на две ортогональные оси в вертикальной плоскости. Сигнал с генератора 35 поступает на дискриминатор который настраивается на срабатывание при достижении определенного ур ня пилообразного напряжения на выходе генератора 35, и через схему И 39 поступает на блок 48 задания масштаба, на который поступает такж с датчика 5 сигнал, пропорциональны высоте подъема груза. Блок 48 задания масштаба формиру усиленный сигнал, поступающий на су матор 7 сигналов, где суммируется с сигналом, поступа ощим с формировате ля 3. Сумматор 7 формирует сигнал, поступающий на осциллограф 10, на к торый поступает также сигнал с форм рователя 4, при этом появляется изо ражение стрелы и грузового каната на экране осциллографа 10. Сигнал с датчика 12, пропорциона ный углу поворота платформы крана, поступает на формирователи 13 и 14, где преобразуется в сигналы, пропор циональные проекциям стрелы на две ортогональные оси п горизонтальной плоскости, на которые поступает модулирующий сигнал с формирователя 4. Сигналы с формирователей 12 и 14 поступают на горизонтальную и вертикальную развертки осциллографа 17, обеспечиваюпще появление изображения на его экране. При перемещении траверсы и груза в вертикальной плоскости или при по- . вороте вокруг вертикальной оси крюка величина этих перемещений преобразуется датчиками 19 и 18 в сигналы, пропорциональные перемещениям, которые поступают на формирователи 2022 и преобразуются в выходные сигналы, пропорциональные проекциям траверсы и груза на две пары ортогональных осей в вертикальной и горизонтальной плоскостях. Этп сигналы поступают на входы 23-26 сумматоров 27-30, где суммируются с сигналами, пропорциональными проекциям стрелы и крюка на соответствующую ось в вертикальной и горизонтальной плоскостях, поступающими с формирователей 13 и 14 и сумматора 7. Сигналы,формируемые сумьшторами 27-30, поступают к горизонтальной и вертикальной разверткам, обеспечивающим изображение на экранах осциллографов 10 и 17. Схема позволяет перемещать центр изображения траверсы и груза так же, как изображение крюка крана, для того, чтобы формируемые отдельно изображения стрелы и крюка, с одной стороны, и траверсы и груза, с другой, перемещались синхронно, обеспечивая совместное полное изображение подвижных органов крана и траверсы с грузом. Таким образом, предлагаемый указатель дает наглядное представление о положении стрелы, крюкэ, траверсы и груза относительно рабочей зоны в вертикальной и горизонтальной плоскостях с учетом наклона траверсы и груза в вертикальной плоскости, проходящей через продольную ось траверсы и груза, и поворота их вокруг вертикальной оси крюка, что повьппает , безопасность работы крана.

| название | год | авторы | номер документа |
|---|---|---|---|
| Указатель положения подвижных органов стрелового крана | 1979 |
|
SU1133226A1 |
| Устройство индикации для стрелового крана | 1978 |
|
SU1125183A1 |
| Указатель положения стрелы и груза для стрелового крана | 1978 |
|
SU1104097A1 |
| Ограничитель грузоподъемности стрелового крана | 1980 |
|
SU992406A1 |
| Предохранительное устройство для стрелового крана | 1978 |
|
SU1118603A1 |
| Указатель положения препятствий для стрелового крана | 1978 |
|
SU1104096A1 |
| Указатель вылета и допустимой нагрузки стрелового крана | 1978 |
|
SU1118604A1 |
| Указатель положения рабочего оборудования стрелового крана | 1978 |
|
SU1104098A1 |
| Система управления стреловым краном | 1974 |
|
SU520318A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2457170C1 |
УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОРГАНОВ СТРЕЛОВОГО КРАНА, содержащий датчики длины и угла подъема стрелы, связанные с формирователями проекций стрелы на вертикальную плоскость, датчик высоты подъема гру- за, соединенный с входом сумматора, второй вход которого связан с выходом формирователя проекций стрелы на вертикальную плоскость, выход второго формирователя соединен с горизонтальной разверткой осциллографа, а выход сумматора подключен к вертикальной развертке осциллографа, а также генератор переменного напряжения и датчик угла поворота платформы, связанный через формирователи проекций стрелы на горизонтальную плоскость с горизонтальной и вертикальной развертками второго осциллографа, отличающи.йся тем, что, с целью повышения безопасности эксплуатации крана, указатель с габжен датчиками угла поворота крюка и наклона грузоподъемной траверсы, дополнительными сумматорами и формирователями проекций грузоподъемной траверсы на вертикальную и горизонтальную плоскости, входы которых подключены к датчикам угла поворота крюка и наклона грузоподъемной траверсы, а выходы соединены с входами , дополнительных сумматоров, а также вторым генератором переменного напряжения и эадатч1П ом длины груэоподъе ;ной траверсы, соединенны и последовательно, и дискриминатором со схеа мой И, входы которых подключенЕэ к первому генератору переменного напряжения, который также соединен с формирователями проекций стрелы на вертикальную плоскость, причем осциллографы выполнены двyxлyчeвы iИ5 выход дискриминатора соединен с вторым isssi входом схемы И, выход которой связан с первым входом сумматора и входом D второго генератора переменного напря жения, а выход задатчика длины грузоподъемной траверсы соединен с входом формирователе; ; проекций грузоподъемной траверсы на вертикальную и горизонтальную плоскости, при этом выход каж,дого дополнительного сумматора соединен с соответствующей разверткой второго луча соответствующего осциллографа, а вторые входы дополнительных сумматоров связаны с формирователями проекций стрелы на вертикальную и горизонтальную плоскости.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЛЕЧЕНИЕ НАРУШЕНИЙ ЦИРКАДНОГО РИТМА | 2013 |
|
RU2631602C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ВИДЕО И СПОСОБ И УСТРОЙСТВО ДЛЯ ДЕКОДИРОВАНИЯ ВИДЕО, ОСНОВАННЫЕ НА ИЕРАРХИЧЕСКОЙ СТРУКТУРЕ БЛОКА КОДИРОВАНИЯ | 2013 |
|
RU2559753C1 |
