Тракторные погрузчики с гидравлическим приводом качающейся рамы, со сменным рабочим оборудованием (челюстной или вильчатый захват и т. п.) известны. Основным недостатком таких погрузчиков является необходимость разворота его ходовой части при складировании перегружаемого материала, что не всегда возможно при неудобной площади, а там, где это возможно, связано с затратой времени для такого маневрирования.
Тракторный погрузчик, согласно изобретению, относящийся к погрузчикам известного типа, .свободен от присущих им недостатков.
Сущность изобретения заключается в том, что качающаяся рама с рабочим оборудованием установлена на поворотном вокруг вертикальной оси мосту, монтированном на верхней части рамной конструкции, жестко связанной с трактором. Поворот качающейся рамы осуществляется с помощью двух гидравлических цилиндров, симметрично расположенных на поворотном мосту. Ось последнего несет ротор гидравлического лопаточного двигателя, статор которого размещен на рамной конструкции. Для управления замыкающей челюстью захвата для бревен и т. п. круглых материалов предназначен гидравлический цилиндр, уста-, новленный На качающейся раме. Шток этого цилиндра посредством гибкой или жесткой тяги связан с замыкающей челюстью захвата.
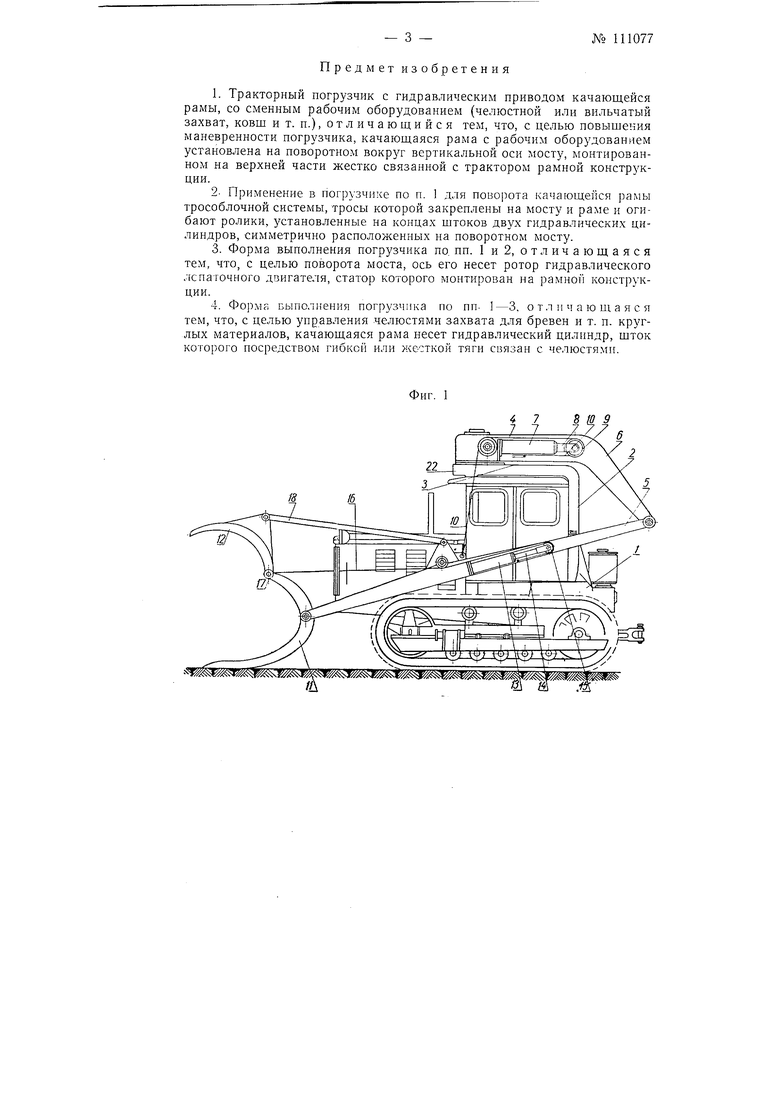
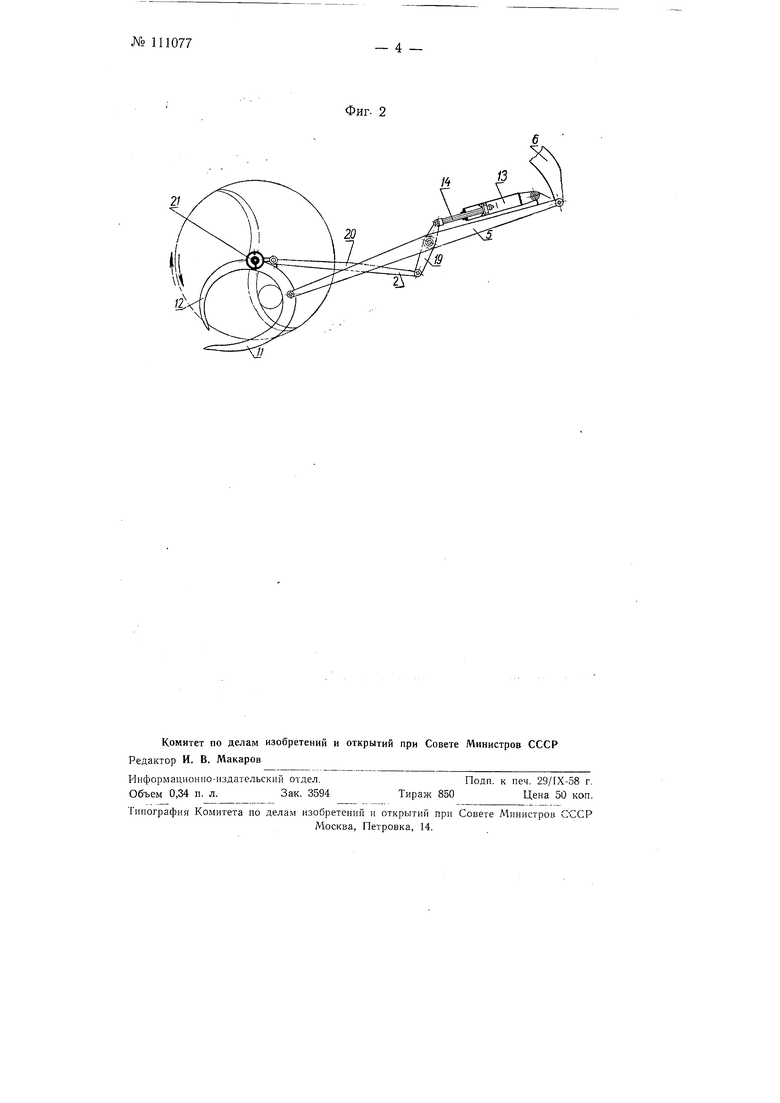
На фиг. 1 изображен боковой вид погрузчика; на фиг. 2-механизм управления челюстями захвата при помощи жесткой тяги.
На остове рамы У трактора жестко крепится рамная конструкция 2, на верхней площадке 5 которой установлена колонна для поворотного моста 4. Последний несет на себе качающуюся вокруг горизонтальной оси раму 5 со сменным рабочим оборудованием, например, челюстным захватом для бревен. Поворотный мост выполняется сварной конструкции, снабженной двумя хвостовыми загнутыми вниз ответвлениями 6, в которых установлена ось поворота качающейся рамы 5. Последняя дредставляет собой две продольные балки, охватывающие с двух сторон остоц
JMo 111077
трактора. Верхним концом рама шарнирно крепится к хвостовым ответвлениям 6 поворотного моота, и на нижнем конце рамы шарнирно крепится захват для бревен или другие сменные рабочие орудия.
Для поворота качающейся рамы 5 предназначены два симметрично расположенные относительно продольной оси моста 4 гидравлических цилиндра 7. Штоки 8 этих цилиндров на выступающих из цилиндров концах несут ролики 9, охватываемые тросами 10, одними концами закрепленными на мосту, а другими - присоединенными к качающейся раме 5.
Захват для бревен (хлыстов) состоит из двух элементов: нижней приемочной вилообразной челюсти 11 и верхней замыкающей челюсти 12. Кинематическая связь двух элементов и их управление выполнены в вариантах.
По первому варианту на качающейся раме 5 монтирован гидравлический цилиндр 13, шток 14 которого на выступающем из цилиндра конце несет ролик 15, огибаемый гибкой тягой 16, одним концом жестко закрепленной на раме. Второй конец гибкой тяги закреплен в шарнирном сочленении 17 челюстей захвата. Замыкающая челюсть 12 захвата шарнирно соединена с качающейся рамой 5 жестким стержнем 18.
По второму варианту шток 14 установленного на качающейся раме цилиндра 13 щарнирно соединен с одним плечом двуплечего рычага 19, поворотно монтированного на качающейся раме 5. Второе плечо рычага шарнирно соединено тягой 20 с нижней приемочной челюстью 11 захвата. Управление замыкающей челюстью 12 захвата осуществляется гидравлической поворотной муфтой 21, смонтированной в шарнирном сочленении 17 челюстей захвата.
Первая схема обладает большей простотой конструкции, вторая схема более гибкая в осуществлении рабочего процесса при захвате груза.
Для поворота моста его ось несет ротор гидравлического лопаточного двигателя 22, а статор последнего монтирован на рамной конструкции, несущей мост 4.
На тракторе устанавливается насос и масляный бак для гидравлической системы управления механизмами погрузки.
Рабочий процесс погрузки осуществляется следующим образом.
Прием груза может производиться с двух положений: когда захват находится впереди трактора или когда он находится сзади. Прием груза на нижний элемент захвата осуществляется движением (наездом) погрузчика вперед или назад в зависимости от того, где расположен захват. После этого груз захватывается включением в работу гидравлического цилиндра механизма захвата.
После захвата груз поднимают с помощью свободного конца качающейся рамы 5 тросами 10, выбираемыми гидравлическими цилиндрами 7, установленными на поворотном мосту 4. За подъемом следует движение трактора вперед или назад, а затем разворот груза при помощи .поворотного моста 4 погрузчика или щтабелевка за счет поворота трактора.
Наличие поворотного моста 4 обеспечивает плавный поворот груза, в особенности пачки хлыстов, при отсутствии специальных погрузочных площадок, в отличие от гусеничного трактора, который разворачиваясь, разрывает землю в месте разворота на погрузочной площадке.
Помимо этого, наличие поворотного моста дает возможность использовать погрузчик, при установке вместо грузового захвата соответствующего рабочего оборудования, на экскаваторных работах или по перегрузке различных сыпучих грузов (балласта, земли, песка и т. п.).
Предмет изобретения
1. Тракторный погрузчик с гидравлическим приводом качающейся рамы, со сменным рабочим оборудованием (челюстной или вильчатый захват, ковш и т. п.), отличающийся тем, что, с целью повыщекия маневренности погрузчика, качающаяся рама с рабочим оборудованием установлена на поворотном вокруг вертикальной оси мосту, монтированном на верхней части жестко связанной с трактором рамной конструкции.
2- Применение в погрузчике по п. 1 для поворота качающейся рамы трособлочной системы, тросы которой закреплены на мосту и раме и огибают ролики, установленные на концах штоков двух гидравлических цилиндров, симметрично расположенных на поворотном мосту.
3.Форма выполнения погрузчика по. пп. 1 и 2, отличающаяся тем, что, с целью поворота моста, ось его несет ротор гидравлического .- спаточного двигателя, статор которого монтирован на рамной конструкции.
4. выполнения погрззчика по пп- I-3, отличающаяся тем, что, с целью управления челюстями захвата для бревен и т. п. круглых материалов, качающаяся рама несет гидравлический цилиндр, шток которого посредством гибкой или жесткой тяги связан с челюстями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Передвижной погрузчик | 1959 |
|
SU135350A1 |
| Лесозаготовительный агрегат | 1961 |
|
SU141698A1 |
| Портальный кран | 1961 |
|
SU145322A1 |
| НАВЕСНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОЙ МАШИНЫ | 1971 |
|
SU314681A1 |
| Гидравлический захват к автопогрузчикам | 1961 |
|
SU151618A1 |
| ТРАКТОРНЫЙ ЛЕСОПОГРУЗЧИК | 1991 |
|
RU2035391C1 |
| Челюстной погрузчик | 1983 |
|
SU1138382A1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |
| Навесное грузозахватное оборудование к погрузчику | 1975 |
|
SU555046A1 |
| ЧЕЛЮСТНОЙ ПОГРУЗЧИК | 1970 |
|
SU268258A1 |
ЖЙ5 ЩК 5йч1Ер А Ж Э1Й2 КйЖ«« 1К2 55
/ДSi М.
4 7
