Изобретение относится к измерительной технике и может быть использовано при регулировке керновых опор акселерометров.
По основному авт.св. № 1037185 известен способ регулировки керновой опоры, используемой в акселерометрах, включающий поворот подвижной системы, путем отклонения подвижной системы на одинаковый угол по и против часовой стрелки относительно горизонтального положения оси чувствительности акселерометра, путем подачи тока в катушку датчика момента акселерометра, снятие внешнего воздействия после каждого отклонения, задание апериодического характера движения подвижной системе при возврщении ее в первоначальное положение, замер величины выходного сигнала каждый раз после возвращения подвижной системы в первоначальное положение и перемещение деталей до достижения минимальной разности выходных сигналов lj .
Однако наличие инерционности подвижной системы акселерометра при свободном возвращении ее к нулевому положению после снятия действия тока несколько сужает зону, вызванную трением, в связи с чем .действительно величина трения в опоре будет большей, чем зарегистрированная с . выхода акселерометра в процессе регулировки, и может быть недопустимой для акселерометров повьш1енной точности.
Целью изобретения является повышение точности регулировки керновой опоры путем снижения величины трения в опоре.
Указанная цель достигается тем, что согласно способу регулировки керновой опоры акселерометра плавно снижают ток в катушке датчика момента до нуля за время, не менее,чем в 50 раз большее постоянной времени апериодического переходного процесса акселерометра.
При плавном снятии действия тока с катушки датчика момента до нуля за время, большее постоянной времени апериодического переходного процесса (t), например за время i (50-100) С подвижная система возвращается к нулевому положению плавно и прекращает свое дальнейшее движение практически точно на границе зоны, определяемой трением.
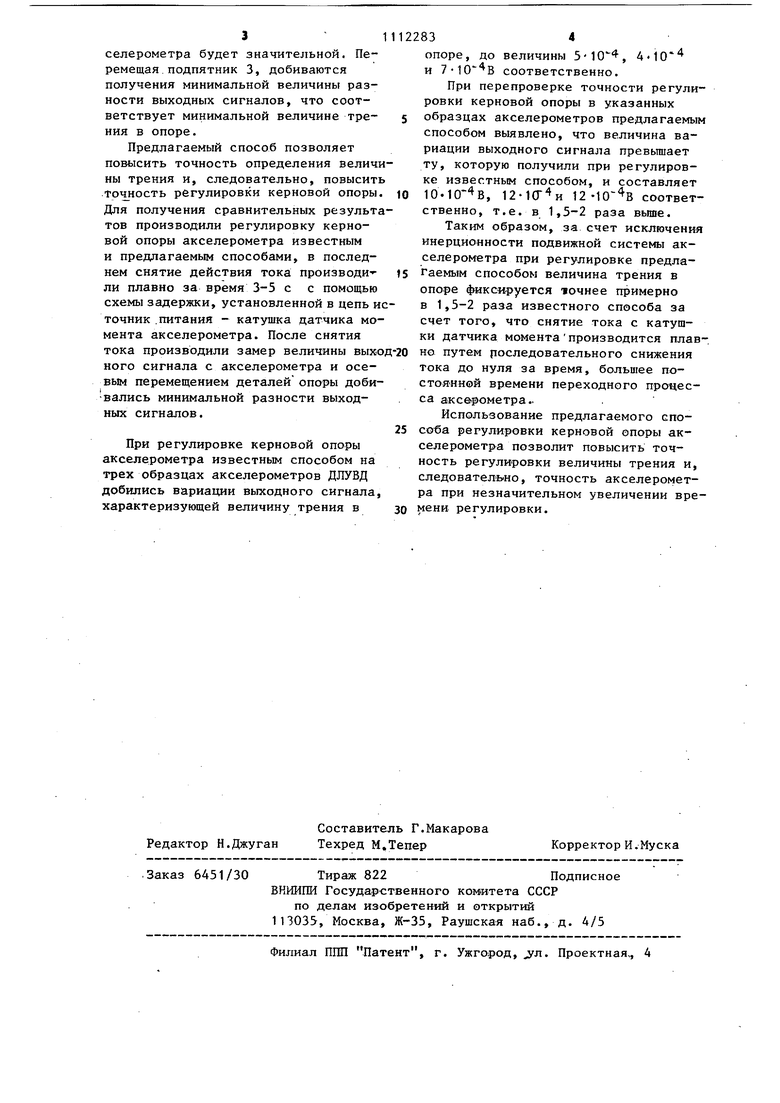
На чертеже изображено устройство для осуществления предлагаемого способа,
Керны 1 опоры установлены на катушке 2 (электропружины) датчика момента акселерометра. Подпружиненные подпятники 3 в корпусе акселерометра имеют свободу перемещения вдоль оси 4. Катушка 2 моментного датчика и резистор 5 являются нагрузкой усилителя 6 акселерометра с предварительно подобранной коррекцией, обеспечивающей апериодический переходный процесс катушки моментного датчика.
Способ осуществляют следующим образом.
В процессе регулировки керновой опоры акселерометр устанавливают так, чтобы выходная ось Х-х акселерометра была перпендикулярна действи сил земного тяготения, указанных стрелкой 7. В этом случае величина трения в акселерометре определяется суммарной величиной трения обеих опор. Производят поворот керна 1 относительно подпятника 3 путем задания первоначального отклонения от нулевого положения на одинаковую величину сначала по, а затем против часовой стрелки подачей напряжения постоянного -гока сначала одной, а затем другой полярности в катушку 2 моментного датчика акселерометра, жестко связанную с кернами 1, через клеммь 8 от источника постоянного тока, гальванически не связанного с источником питания усилителя. После каждого отклонения плавно снимают действие тока с катушки 2 датчика момента, подаваемого от источника питания, путем плавного снижения тока до нуля за время, не менее чем в 50 раз большее постоянной времени переходного процесса акселерометра, например за время 3-5 с с помощью схемы задержки, установленной в цепь источник питания - катушка 2. Катушка 2 подсоединена к источнику питания через клеммы 8. После снятия тока с катушки 2 датчика момента производят замер величины выходного сигнала с акселерометра вольтметром 9 (с учетом знака). При наличии трения в опорах из-за неправильной первоначальной установки подпятника относительно керна, что свидетельствует о наличии зазора или избыточного натяга в опоре, алгебраическая разница двух сигналов на выходе ак3 селерометра будет значительной. Перемещая . подпятник 3, добиваются получения минимальной величины разности выходных сигналов, что соответствует минимальной величине трения в опоре. Предлагаемый способ позволяет повысить точность определения велич ны трения и, следовательно, повысит точность регулировки керновой опоры Для получения сравнительных результ тов производили регулировку керновой опоры акселерометра известным и предлагаемым способами, в последнем снятие действия тока производи ли плавно за время 3-5 с с помощью схемы задержки, установленной в цепь и точник .питания - катушка датчика мо мента акселерометра. После снятия тока производили замер величины вых ного сигнала с акселерометра и осевым перемещением деталей опоры доби - вались минимальной разности выходных сигналов. При регулировке керновой опоры акселерометра известным способом на трех образцах акселерометров ДЛУВД добились вариации выходного сигнала характеризующей величину трения в 834 опоре, до величины 510 , и 710 В соответственно. При перепроверке точности регулировки керновой опоры в указанных образцах акселерометров предлагаемым способом выявлено, что величина вариации выходного сигнала превьтаает ту, которую получили при регулировке известным способом, и составляет 1010 В, ПКГ и 12-10 В соответственно, т.е. в 1,5-2 раза вьше. Таким образом, за счет исключения инерционности подвижной системы акселерометра при регулировке предлагаемым способом величина трения в опоре фиксируется точнее примерно в 1,5-2 раза известного способа за счет того, что снятие тока с катушки датчика моментапроизводится плавно путем последовательного снижения тока до нуля за время, большее постоя«ной времени переходного процесса аксерометра.. Использование предлагаемого способа регулировки керновой опоры акселерометра позволит повысить точность регулировки величины трения и, следовательно, точность акселерометра при незначительном увеличении времени регулировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулировки керновой опоры акселерометра | 1982 |
|
SU1037185A1 |
| Керновая опора для осей чувствительных элементов прецизионных измерительных приборов | 1983 |
|
SU1151921A1 |
| Способ определения массогабаритных характеристик электроизмерительного прибора | 1987 |
|
SU1492292A1 |
| Способ регулировки величины осевого зазора в керновой опоре стрелочного указателя электроизмерительных приборов | 1980 |
|
SU957004A1 |
| Способ определения веса закрепленной в керновых опорах подвижной части электроизмерительного прибора | 1983 |
|
SU1109649A1 |
| СПОСОБ УПРОЧНЕНИЯ ОПОРНОЙ ПОВЕРХНОСТИ КРАТЕРА ПОДПЯТНИКА | 1996 |
|
RU2117302C1 |
| Способ регулировки осевого зазора в керновых опорах электроизмерительного прибора и устройство для его осуществления | 1989 |
|
SU1760366A1 |
| СПОСОБ СЛЕЖЕНИЯ ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2546054C1 |
| Электроизмерительный прибор и способ его регулировки | 1986 |
|
SU1341589A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ОСЕВОГО ЗАЗОРА В КЕРНОВЫХ ОПОРАХ ЭЛЕКТРОИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2171966C2 |
СПОСОБ РЕГУЛИРОВКИ КЕРНОВОЙ ОПОРЫ АКСЕЛЕРОМЕТРА по авт.св.№1037185, отличающийся тем, что, с целью повьшения точности регулировки, плавно снижают ток в катушке датчика момента до нуля за время, не менее чем в 50 раз большее постоянной времени апериодического переходного процесса акселерометра. (О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ регулировки керновой опоры акселерометра | 1982 |
|
SU1037185A1 |
