00
00
ел Изобретение отно.сится к измерительной технике и может быть исполь зовано, в частности, в акселерометрах . Известно, что минимальному момен ту трения в керновой опоре соответствует минимально допустимая величина осевого зазора,между керном и подпятником и, следовательно, от выбора положения подпятника относительно керна зависит величина трения в керновой опоре. В керновых опорах, в которых не предусмотрено перемещение подпят ника относительно керна, минимальная величина зазора, а значит и величина трения обеспечиваются конструктивно путем расчета требуемых размеров в сопрягаемых деталях. В, .виду значительных разбросов допуско на изготовление деталей опоры указанный способ обеспечения минимального трения неприемлем для точных приборов. Известен способ регулировки поло жения подпятника относительно оси в опорах, содержащих регулируемый подпятник, включающий расчет оптимального положения подпятника относительно оси, выставку этого положения перемещением подпятника, конт роль положения подпятника с помощью измерительного индикатора EllОднако этот способ обладает следующим недостатком. В керновых опорах.с неплавающим подпятником точность выставки зазора ограничена из -за наличия трения в резьбовой паре корпус-винт и сопротивления упругой пружины измерительного индикатора. Прилагаемые.усилия к подпятнику при регулировке положения должны быть больше усилий, необходимых для преодоления сопротивления трения и сопротивления пружины, и могут в результате быть выше допустимых,, а также нарушить сферу в подпятнике и керне, так как- для опор с минимальным радиусом сферы величины допускаемого напряжения смятия малы Этот способ полностью неприемЛJeм для контроля зазора между керном и подпятником в керновых опорах с плавающим (подпружиненным подпятником, так как невозможно точно установить начальный момент соприкосновения подпятника с керном изза деформации пружины в подпятнике. Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является способ регул ровки керновой onj3pca,B котором регул ровку производят путем раскачиваний находящейся в поле постоянного магн та катушки магнитоэлектрического измерительного устройства с .установ ленны1ии на ней элементами опоры (кер нами) за счет подачи в катушку синусоидального тока низкой частоты 1...5 Гц, выбора при этом положения подпятника относительно керна, соответствующего нулевому зазору в опоре по максимальному размаху колебаний стрелки, связанной жестко скатушкой Г2. Известный способ обладает рядом недостатков, снижающих точность выставки подпятника относительно ,керна и соответственно ухудшающих точность регулируемого прибора. Во-первых, точность замеров оотаточного момента трения по размаху колебаний стрелки ограничена конечной разрешающей способностью шкалы, так как невозможно заметить небольшие изменения в размахе колебаний стрелки по шкале регистрируемого приспособления. В результате закладывается ошибка в определении положения подпятника относительно керна, соответствующего минимальному трению. Существенное увеличение длины стрелки, установленной на катушке, длины шкалы и увеличение ее разрешающей способности влечет за собой увеличение веса подвижной части регулируемого прибора и, как следствие, неточность в выставке из-за дополнительного трения от изменения в весе подвижной части при регулировке. Во-вторых, в процессе регулирования по известному способу необходимо строго поддерживать амплитуду переменного тока, подаваемого в катушку, так как размах колебаний стрелки пропорционален току. А во время регулирования ток прогревает катушку, в результате увеличивается сопротивление катушки. Поэтому первоначальная величина тока, подаваемая в катушку в процессе регулирования, будет изменяться в зависимости от сопротивления катушки. В результате в определение максимума колебаний стрелки, соответствующего минимальному трению в опоре, будет вноситься дополнительная погрешность. Этот недостаток может быть устранен, если регулировку производить после установления теплового режима катушки, но это удлиняет существенно время регулирования трения в опоре прибора. Следует отметить, что некоторое повышение точности регулировки момента трения по известному способу возможно в случае применения высокоточных измерительных приборов и стабилизированных источников электропитания на частоту 1...5 Гц, но это влечет за собой усложнение способа и удлинение процесса регулисювки, так как проводимые работы с использованием высокоточной аппаратуры
усложняются и удлиняются по времени.
Цель изобретения - уменьшение величины трения в керновой опоре.
Поставленная цель достигается тем, что согласно способу регулировк керновой опоры, включающему осуществление поворота подвижной системы путем подачи тока в катушку датчика момента акселерометра, регистрацию величины находного сигнала акселероиетра и осевое перемещение подпятника относительно керна, поворот керна производят путем последовательного отклонения подвт-шной системы на одинаковый угол По и против чаI совой стрелки относительно горизонтально,го положения оси чувствительности акселерометра, после кахсдого от клонения снимают внешнее воздействие задают апериодический характер движения подвижной системы при возвращении ее в первоначальное положение и производят замер величины выходного сигнала каждый раз после возвращения подвижной системы в первоначальное положение, а осевое перемещение деталей опори производят до достижения минимальной разности выходных сигналов.
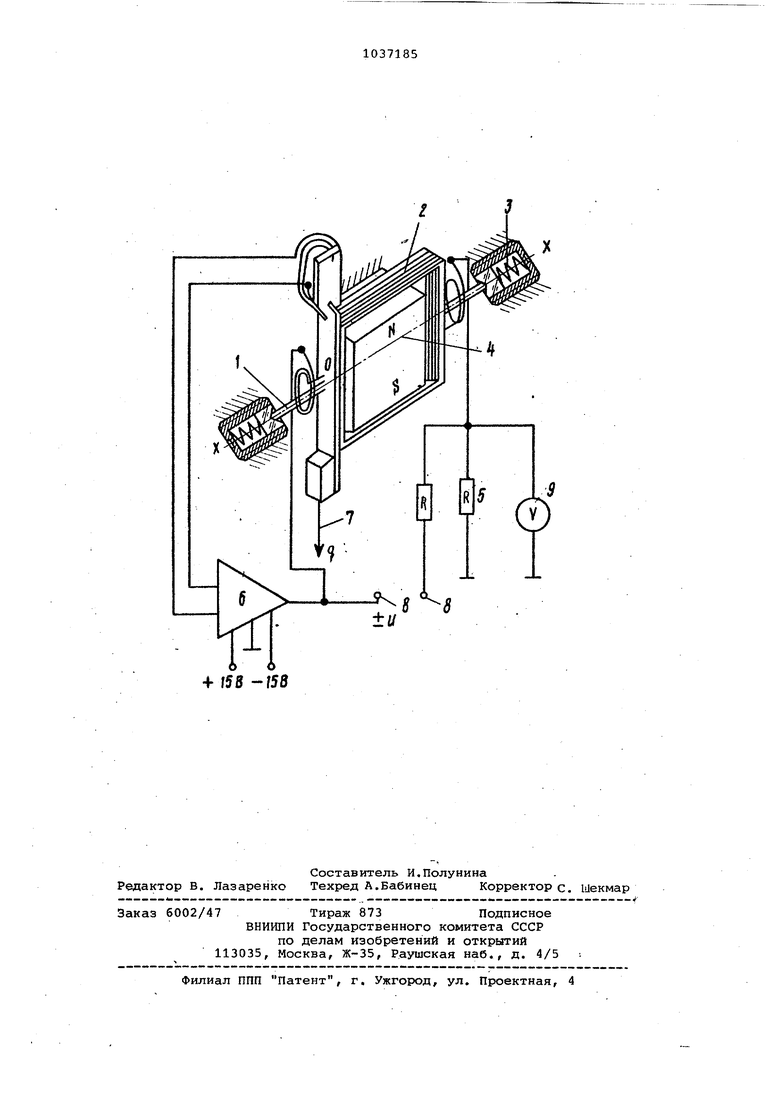
На чертеже изображено устройство для осуществления предлагаемого ci;ioco6a.
Керны 1 опоры установлены на: кату ке 2 датчика момента ( электропружины) акселерометра, подпружиненные подпятники 3 в корпусе акселерометра имеют свободу перемещения в направлении вдоль оси 4. Катушка 2 моментного датчика и резистор 5 являются нагрузкой усилителя 6 акселерометра.
В процессе регулирования трения в керновой опоре акселерометр устанавливают таким образом, чтобы катушка находилась в положении, когда выходная ось Х-Х акселерометра перпендикулярна направлению действия сил земного тяготения, указанных стрелкой 7. В этом случае величина трения в акселерометре определяется суммарной величиной трения обеих
опор.
Предлагаемый способ осуществляется следующим образом.
Корректирующими цепями усилителя предварительно обеспечивают апериодический переходный процесс катушки моментного датчика с относительным коэффициентом демпфирования 6. 1...3. Производят поворот керна 1 относительно подпятника 3 путем последовательного задания первоначального отклонения от рулевого положения на одинаковую величину сначала по, а затем против часовой стрелки, например, подачей напряжения постоянного тока сначала одной, а затем другой полярности в катуыуу
2 моментного датчика акселерометра жестко связанную с кернами, через клеммы 8 от источника постоянного тока, гальванически несвязанного с источником питания усилителя.
После каждого произведенного отклонения снимают внешнее воздействие (отключают ток) и после возвращения подвижной системы (vKaTytoKH с кернами по апериодиче скому закону к нулевому положению производят замер величины выходного .сигнала с акселерометра вольтметром 9 (с учетом знака) . При наличии древня в опорах из-за неправильной первоначгшьной установки подпятника относительно керна, что свидетельствует о на-, личии зазора или избыточного натяга в опоре, алгебраическая разница двух сигналов на выходе акселерометра будет значительной.Перемещая подпятник 3, добиваются получения минимальной величины разности выходных сигналов, что соответствует минимальной величине трения в опоре.
Проведение регулировки трения в керновой опоре предлагаемым способом позволяет более точно достигнуть минимальной величины трения в опоре благодаря тому, что повышается чувствительность способа:остаточные сигналы можно замерить сущест- венно точнее по сравнению с замером величины размаха колебаний, а задание характера движения подвижной системе акселерометра с закрепленны- , ми на ней кернами по апериодическому закону с подобранной постоянной времени обеспечивает то, что подвижная система после снятия внешнего воздействия возвращается к нулевому положению и при этом не может пройти через положение равновесия,;.
Предложенный способ не требует высокоточной и сложной аппаратуры, а начальные отклонения, задаваемые, например, подачей тока в катушку, не ведут к ее перегреву, так как длительность подачи тока каждой полярности не более 1... 2 с. .
Таким образом, предложенный способ
0 регулировки керновой опоры повышает точность изделия, позволяет достигнуть минимальной величины трения для любой конструкции акселерометра, выполненного на керновых опорйх.
При частотах собственных недемпфированных колебаний подвижных систем акселерометров более 20 Гц относительном коэффициенте демпфирования в пределах 1...3 время переходного процесса длится доли секунды, что не оказывает существенного влияния на время регулировки акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулировки керновой опоры акселерометра | 1983 |
|
SU1112283A2 |
| СПОСОБ УПРОЧНЕНИЯ ОПОРНОЙ ПОВЕРХНОСТИ КРАТЕРА ПОДПЯТНИКА | 1996 |
|
RU2117302C1 |
| Электроизмерительный прибор и способ его регулировки | 1986 |
|
SU1341589A1 |
| Способ регулировки величины осевого зазора в керновой опоре стрелочного указателя электроизмерительных приборов | 1980 |
|
SU957004A1 |
| Керновая опора для осей чувствительных элементов прецизионных измерительных приборов | 1983 |
|
SU1151921A1 |
| ПОДВЕСКА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПРИБОРА | 1968 |
|
SU206841A1 |
| Щитовой амперметр переменного тока | 1985 |
|
SU1308902A1 |
| Способ регулировки осевого зазора в керновой опоре измерительного механизма | 1985 |
|
SU1264082A1 |
| Способ определения массогабаритных характеристик электроизмерительного прибора | 1987 |
|
SU1492292A1 |
| ПОДВЕСКА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПРИБОРА | 1968 |
|
SU210841A1 |
СПОСОБ РЕГУЛИРОВКИ КЕРНОВОЙ ОПОРЫ АКСЕЛЕРОМЕТРА, включающий осуществление поворота подвижной системы путем подачи тока в катушку датчика момента акселерометра, регистрацию величины выходного сигнала акселерометра и осевое перемещение подпятника относительно керна, о тличающийся тем, что, с целью уменьшения трения в опоре, поворот керна производят путем последовательного отклонения подвижной. сист,емы на одинаковый угол по и против часовой стрелки относительно горизонтального положения оси чувствительности акселерометра , после каждого отклонения снимают внешнее воздействие, задают апериодический характер движения подвижной системы при возвращении ее в первоначальное положение и производят замер-величины выходного сигнала каждый раз пос-i ле возвращения подвижной системы (Л в первоначальное положение, а осевое перемещение деталей опоры произвос дят до достижения минимальной разности выходных сигналов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Инструкция по регулировке осевого люфта, 6Ш2.781.028И2 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Красильников А.А | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Отраслевой центр научно-технической информации и технико-экономических исследований | |||
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
| Пишущая машина | 1922 |
|
SU37A1 |
