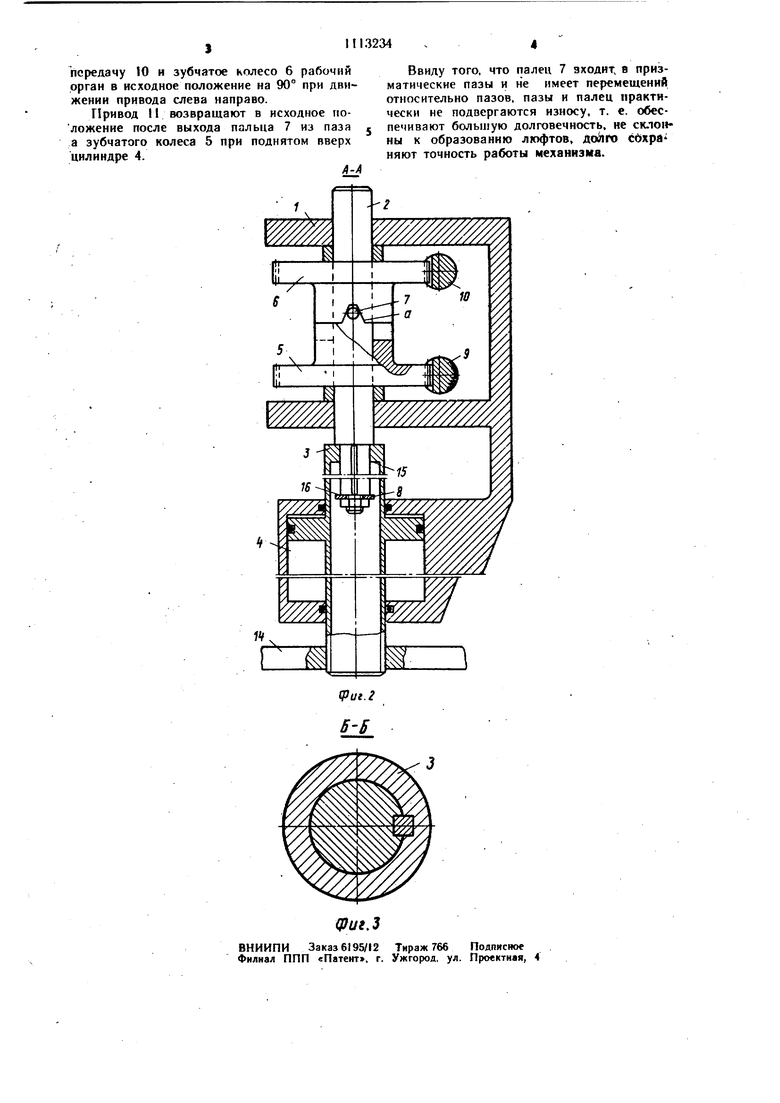
Изобретение относится к машнностроению, в частности к станкостроению, и может быть применено в многооперационных станках типа «обрабатывающий центр. Известен автооператор, используемый в устройстве для автоматической смены инструментов, содержащий двухзахватный рычаг, расположенный на поворотном и подвижном в осевом направлении валу со свободно установленными на нем двумя зубчатыми колесами, сцепленными с рейками, и цилиндр осевого перемещения вала. Каждое зубчатое колесо имеет щлицевую нарезку и установлено с возможностью периодического взаимодействия со щлицевЫм участком вала 1J. Однако известное устройство из-за износа щлицевых соединений вследствие их подвижности обладает недостаточной надежностью. Увеличение люфта в соединении ведет к потери точности работы автооператора. Целью изобретения является повышение надежности работы. Поставленная цель достигается тем, что в автооператоре, содержащем двухзахватный рычаг, расположенный на поворотном н подвижном в осевом направлении валу со свободно установленными на нем двумя зубчатыми колесами, сцепленными с рейками, и цилиндр осевого перемещения вала, вал выполнен составным из двух частей, одна из которых снабжена дополнительно введенным в устройство пальцем, установленным с возможностью взаимодействия с призматическими пазами, которые выполнены в торцах ступиц зубчатых колес, а другая часть вала выполнена в виде полого штока цилиндра осевого перемещения вала, при этом обе части вала установлены с возможностью взаимодействия одна с другой. На фиг. 1 показан предложенный автооператор; на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - сечение Б-Б на фиг. 1. Автооператор состоит из корпуса 1, в котором свободно установлены поворотный и подвижный в осевом направлении вал, составленный из двух частей 2 и 3, цилинд: ра 4 осевого перемещения вала. На части 2 вала установлены зубчатые колеса 5 н 6 с возможностью свободно вращаться на нем, в ступицах щестерен выполнены призматические пазы а. От осевого перемещения шестерни удерживаются стенками корпуса I. Между зубчатыми колесами в часть 2 вала запрессован палец 7, на конце этой части вала неподвижно в осевом направлеНИИ закреплена шайба 8. Зубчатые колеса 5 и 6 соединены с помощью реек 9 н 10 с приводами поступательного движения 11 и 12; движение реек. а следовательно, и приводов ограничивается регулировочными винтами 13. Составные части 2 и 3 вала соединены между собой подвижно в осевом направлении при помощи, например, шпоночного соединения, нанижнем конце части 3 вала закреплен неподвижно рабочий орган 14, например двухзахватный рычаг механизма автоматической смены инструментов. Часть 3 вала имеет верхний и нижний опорные торцы 15. Устройство работает следующим образом. В исходном состоянии цилиндр 4 (фиг. 1) через верхний торец 15 части 3 вала и торец 16 части 2 вала прижимает палец 7 в призматический паз а зубчатого колеса 6, т. е. соединяет рабочий орган 14 через части 2 и 3 вала жестко в окружном направлении с зубчатым колесом 6. Пр.иводом поступательного движения 12 через рейку 10 вращают зубчатое колесо 6 вместе:с рабочим органом через составные части вала, например, против часовой стрелки (при виде сверху) при движении привода 12 справа налево до такого положения, когда ось пальца 7 будет параллельна оси паза а зубчатого колеса 5, т. е. на 90°. Положение совпадения осей пальца и паза регулируется винтами 1.3 - происходит цикл захвата оправок с инструментами в щпинде-те н гнезде магазина. Далее привод опускает рабочий орган 14 вместе с частью 3 вала на всю длнну хода, требуемого для смены инструментов, а в конце хода внутренний торец 15 части вала 3, упираясь в торец 16 шайбы 8, опускает часть 2 вала на незначительную величину, достаточную для того, чтобы прижать палец 7, в приз.матический паз а зубчатого колеса 5, т. е. соединяет рабочий орган 14 с зубчатым колесом 5 жестко в окружном направлении. Приводом 11 вращают через рейху 9 зубчатое колесо 5, составной вал, рабочий орган 14 на 180° до такого положения, когда ось пальца 7 будет параллельна оси паза а в зубчатом колесе 6. Патожение совпадения осей пальца и пазов зубчатых колес регулируется винтами 13. Происходит цикл смены местами оправок с инструментами.Цилиндром 4 поднимают часть 3 вала вместе с рабочим органом 14 вверх до крайнего верхнего положения на всю длину хода. В конце хода вверх верхний торец 15 части 3 вала упирается в торец 16 части 2 вала и поднимает его на незначительную величину, достаточную для того, чтобы прижать палец 7 в паз а зубчатого колеса 6, т. е. жестко соединить его с рабочим органом через вал. Происходит цикл установки оправок в шпиндель и гнездо магазина. Далее приводом 12 поворачивают через реечную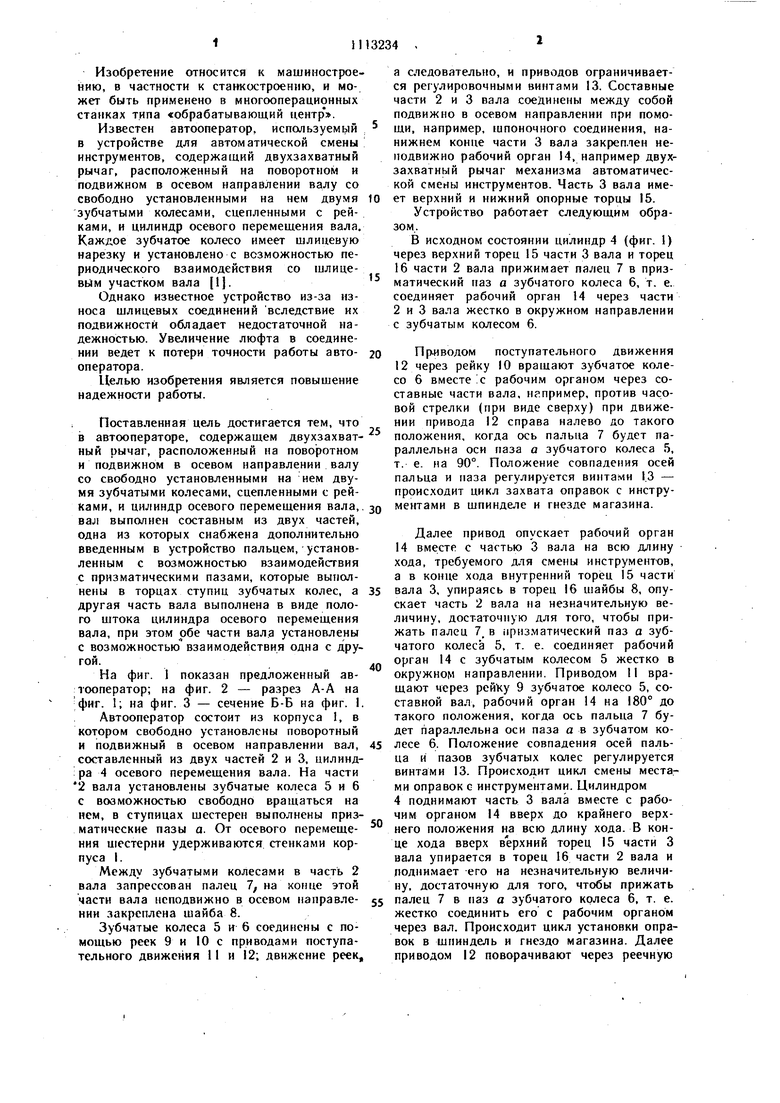
| название | год | авторы | номер документа |
|---|---|---|---|
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU770736A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство автоматической смены инструмента | 1989 |
|
SU1668095A1 |
| Автооператор для металлорежущих станков | 1980 |
|
SU944866A2 |
| Автооператор для металлорежущих станков | 1983 |
|
SU1144844A2 |
| Автооператор | 1974 |
|
SU554129A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU657954A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU649542A1 |
АВТООПЕРАТОР, содержащий двухзахватный рычаг, расположенный на поворотном и подвижном в осевом направлении валу со свободно установленными на нем двумя зубчатыми колесами, сцепй ленными с рейками, и цилиндр осевого перемещения вала, отличающийся тем, что, с целью повыщения надежности работы, вал выполнен составным из двух частей, одна из которых снабжена дополнительно введенным в устройство пальцем, установленным с возможностью взаимодействия с призматическими пазами, которые выполнены в торцах ступиц зубчатых колес, а другая часть вала выполнена в виде полого щтока цилиндра осевого пперемещения вала, при этом обе части вала установлены с возможностью взаимодействия одна с другой. 00 to О9 titi
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматической смены инструментов | 1979 |
|
SU854676A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
