Изобретение относится к станкостроению и может быть использовано в различных загрузочно-разгрузочных устройствах станков-автоматов.
По основному авт. св. № 944866 известен автооператор для металлорежущих станков, содержащий корпус, пиноль-рейку, продольно-подвижную относительно корпуса, механическую руку с двумя клещевыми захватами и приводы поворота руки и возвратно-поступательного перемещения пиноль-рейки, кинематически связанные между собой, а также жестко закрепленный на корпусе руки фиксатор и двухвенцовую шлицевую полумуфту, жестко закрепленную на входном валу привода поворота руки. Автооператор снабжей также кулачковым механизмом, кинематически связанным с приводом поворота руки и возвратно-поступательного перемещения пиноль-рейки, толкатель которого расположен с возможностью взаимодействия с зажимным устройством инструментальных оправок в шпинделе металлорежущего станка 1.
Шпиндели металлорежущих станков, имеющих автоматическую смену инструмента, оснащены специальными выталкивателями инструментальных оправок из щпинделя станка, которые предварительно страгивают инструментальную оправку в момент ее смены автооператором, преодолевая усилие самозаклинивания инструментальной оправки в конусе щпинделя и, тем самым, разгружая автооператор от дополнительных нагрузок, вызывающих дополнитель.ный износ его механизмов.
Недостатком данного устройства является невозможность взаимодействия автооператора (отсутствие жесткой кинематической связи) с выталкивателем инструментальных оправок из щпинделя станка. Поэтому в станках, где применен такой автооператор, выталкиватели инструментальных оправок должны иметь индивидуальные гидро-, пневмо-, электроприводы и соответственно аппаратуру и цепи управления, что приводит к удорожанию и снижению надежности механизма смены инструмента в целом.
Целью изобретения является расщирение функциональных возможностей автооператора и повыщение надежности путем сокращения исполнительных звеньев и элементов цепей управления.
Указанная цель достигается тем, что автооператор снабжен рычагом, закрепленным на корпусе автооператора с возможностью взаимодействия с выталкивателем инструментальных оправок из щпинделя станка и кинематически связанным с кулачковым механизмом автооператора.
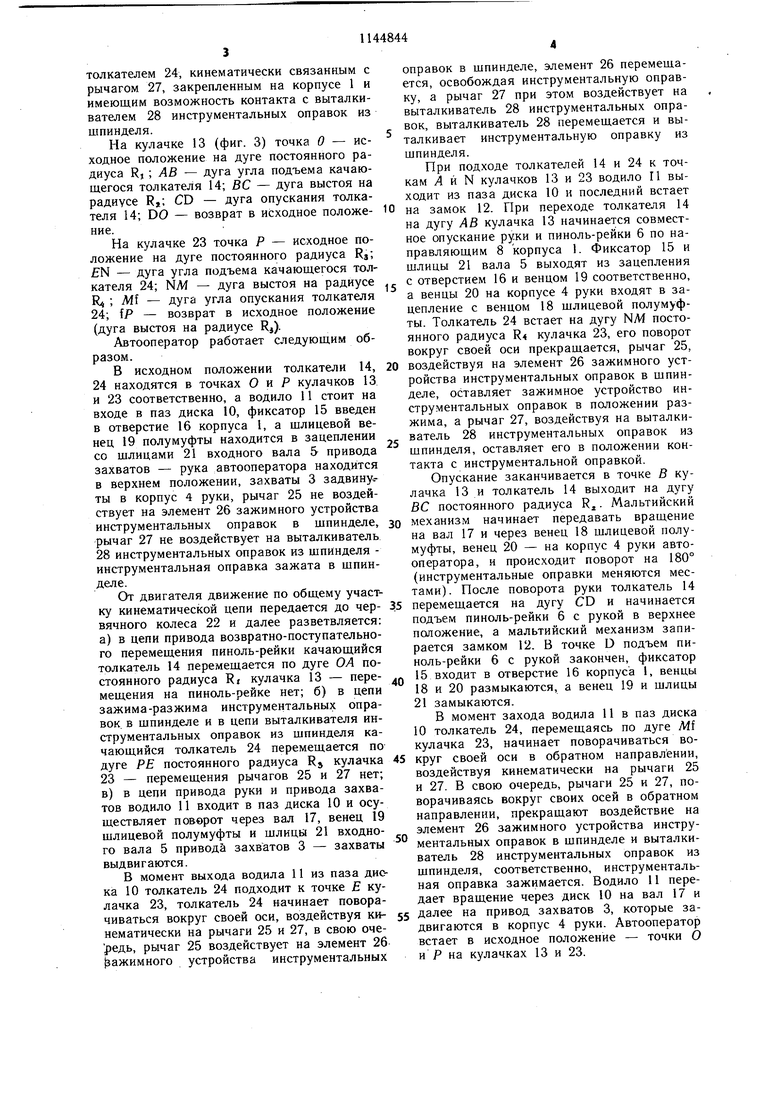
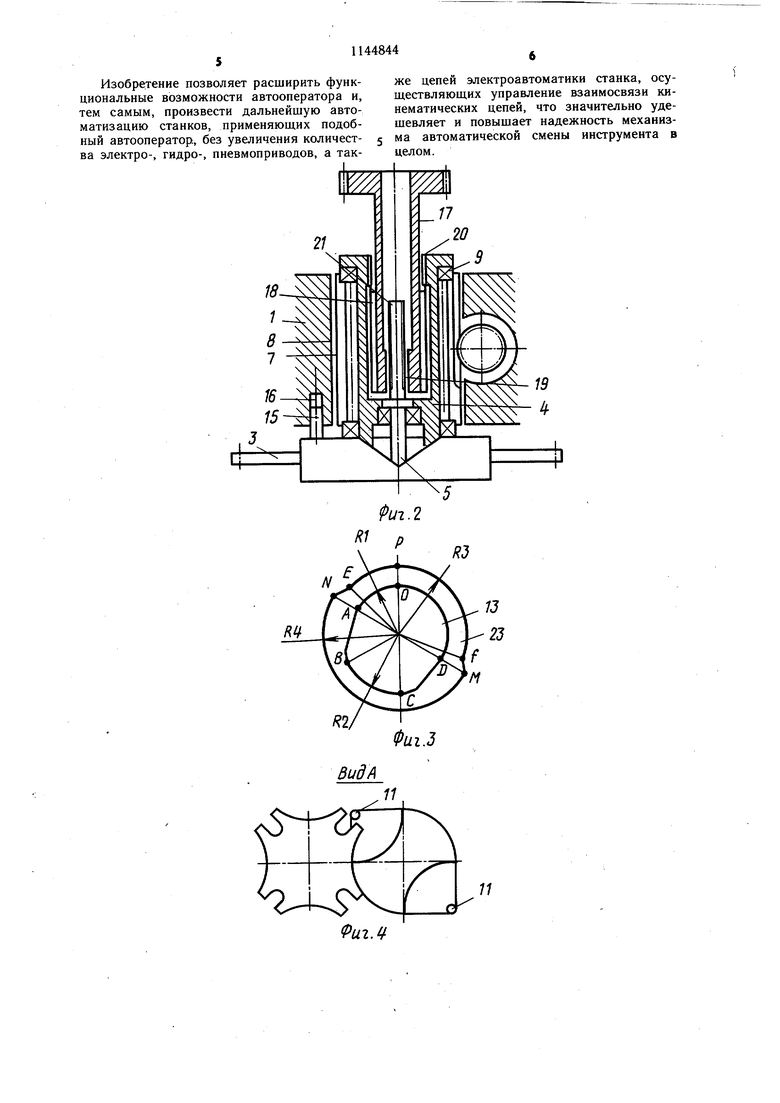
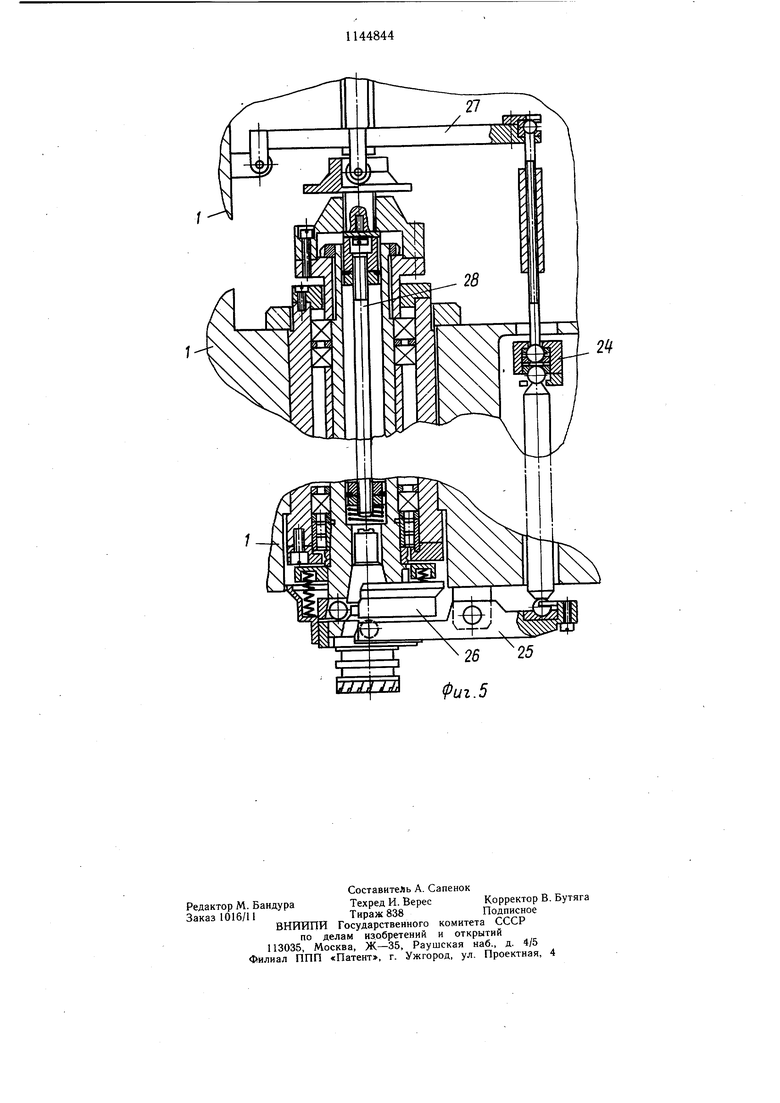
На фиг. 1 представлена кинематическая схема йвтооператора; на фиг. 2 - взаимосвязь конечных звеньев кинематических цепей с исполнительным органом автооперато ра; на фиг. 3 - взаимное расположение и рабочие профили кулачков возвратно-поступательного перемещения пиноль-рейки, управления элементом зажимного устройства шпинделя и выталкивателем инструментальной оправки; на фиг. 4 - вид А на фиг. 1; на фиг. 5 - взаимосвязь рычага с элементом зажимного устройства (чашкой шпинделя,
осуществляющей, зажим-разжим инструментальных оправок) и выталкивателем инструментальных оправок из щпинделя.
Автооператор содержит корпус 1 и расположенные в нем двигатель привода автооператора 2, механическую руку с двумя клещевыми захватами 3, корпусом 4 и приводом захватов с входным валом 5, пинольрейку 6 с направляющими 7 поступательного перемещения, а также кинематические цепи приводов поворота руки, возвратнопоступательного перемещения пиноль-рейки, привода автооператора, зажима-разжима инструментальных оправок в шпинделе станка, выталкивателя инструментальных оправок из щпинделя станка. (В корпусе 1 размещен также и шпиндельный узел станка).
В корпусе 1 выполнены направляющие 8, ответные направляющим 7, по которым осуществляется возвратно-поступательное перемещение пиноль-рейки 6. Корпус 4 руки установлен поворотно-подвижно на подщипниках 9 в пиноль-рейке 6. Кинематическая цепь привода поворота руки содержит мальтийский механизм, состоящий из диска 10, водила И, совмещенного с замком 12, и промежуточные зубчатые передачи.
Кинематическая цепь привода возвратнопоступательного перемещения пиноль-рейки 6 содержит кулачок 13 с качающимся толкателем 14 и промежуточные зубчатые передачи. На корпусе 4 руки жестко закреплен фиксатор 15, а в корпусе 1 выполнено ответное ему отверстие 16. На выходном валу 17 привода поворота руки размещена шлицевая полумуфта с венцами 18 и 19. На корпусе 4 руки выполнены венцы 20, ответные шлицевым венцам 18, а на входном валу 5 привода захватов выполнены шлицы 21, ответные шлицевым венцам 19. Кинематическая цепь привода автооператора содержит червячное колесо 22. Кинематическая цепь привода устройства зажима-разжима инструментальных оправок в щпинделе станка содержит кулачок 23 с качающимся толкателем 24, кинематически связанным с рычагом 25, закрепленным на корпусе 1 и имеющим возможность контакта с элементом 26 зажимного устройства инструментальных оправок в щпинделе. Кинематическая цепь привода выталкивателя инструментальных оправок из щпинделя содержит кулачок 23 с качающимся толкателем 24, кинематически связанным с рычагом 27, закрепленным на корпусе 1 и имеющим возможность контакта с выталкивателем 28 инструментальных оправок из шпинделя. На кулачке 13 (фиг. 3) точка О - исходное положение на дуге постоянного радиуса R, ; АВ - дуга угла подъема качающегося толкателя 14; ВС - дуга выстоя на радиусе R,; CD - дуга опускания толкавозврат в исходное положетеля 14; DO ние. На кулачке 23 точка Р - исходное положение на дуге постоянного радиуса Rj; jEN - дуга угла подъема качающегося толкателя 24; NM - дуга выстоя на радиусе Ri ; Mi - дуга угла опускания толкателя 24; fP - возврат в исходное положение (дуга выстоя на радиусе R,). Автооператор работает следующим образом. В исходном положении толкатели 14, 24 находятся в точках О и Р кулачков 13 и 23 соответственно, а водило 11 стоит на входе в паз диска 10, фиксатор 15 введен в отверстие 16 корпуса 1, а шлицевой венец 19 полумуфты находится в зацеплении со шлицами 21 входного вала S привода захватов - рука автооператора находится в верхнем положении, захваты 3 задвину г ты в корпус 4 руки, рычаг 25 не воздействует на элемент 26 зажимного устройства инструментальных оправок в шпинделе, зо рычаг 27 не воздействует на выталкиватель 28 инструментальных оправок из шпинделя инструментальная оправка зажата в шпинделе. От двигателя движение по общему участку кинематической цепи передается до чер- 35 вячного колеса 22 и далее разветвляется: а) в цепи привода возвратно-поступательного перемещения пиноль-рейки качающийся толкатель 14 перемещается по дуге ОА постоянного радиуса К« кулачка 13 - пере- .,. мещения на пиноль-рейке нет; б) в цепи зажима-разжима инструментальных оправок, в шпинделе и в цепи выталкивателя инструментальных оправок из шпинделя качающийся толкатель 24 перемещается по дуге РЕ постоянного радиуса Rj кулачка 45 23 - перемещения рычагов 25 и 27 нет; в) в цепи привода руки и привода захватов водило 11 входит в паз диска 10 и осуществляет поворот через вал 17, венец 19 шлицевой полумуфты и шлицы 21 входного вала 5 привода захватов 3 - захваты выдвигаются. В момент выхода водила 11 из паза диска 10 толкатель 24 подходит к точке Е кулачка 23, толкатель 24 начинает поворачиваться вокруг своей оси, воздействуя ки- 55 нематически на рычаги 25 и 27, в свою очередь, рычаг 25 воздействует на элемент 26 ажимного устройства инструментальных оправок в шпинделе, элемент 26 перемещается, освобождая инструментальную оправку, а рычаг 27 при этом воздействует на выталкиватель 28 инструментальных оправок, выталкиватель 28 перемещается и выталкивает инструментальную оправку из шпинделя. При подходе толкателей 14 и 24 к точкам Л и N кулачков 13 и 23 водило П выходит из паза диска 10 и последний встает на замок 12. При переходе толкателя 14 на дугу АВ кулачка 13 начинается совместное опускание руки и пиноль-рейки 6 по направляющим 8 корпуса 1. Фиксатор 15 и шлицы 21 вала 5 выходят из зацепления с отверстием 16 и венцом 19 соответственно, а венцы 20 на корпусе 4 руки входят в зацепление с венцом 18 щлицевой полумуфты. Толкатель 24 встает на дугу NM постоянного радиуса R кулачка 23, его поворот вокруг своей оси прекращается, рычаг 25, воздействуя на элемент 26 зажимного устройства инструментальных оправок в щпинделе, оставляет зажимное устройство инструментальных оправок в положении разжима, а рычаг 27, воздействуя на выталкиватель 28 инструментальных оправок из шпинделя, оставляет его в положении контакта с инструментальной оправкой. Опускание заканчивается в точке В кулачка 13 и толкатель 14 выходит на дугу ВС постоянного радиуса R. Мальтийский механизм начинает передавать вращение на вал 17 и через венец 18 шлицевой полумуфты, венец 20 - на корпус 4 руки автооператора, и происходит поворот на 180° (инструментальные оправки меняются местами). После поворота руки толкатель 14 перемещается на дугу CD и начинается подъем пиноль-рейки 6 с рукой в верхнее положение, а мальтийский механизм запирается замком 12. В точке D подъем пиноль-рейки 6 с рукой закончен, фиксатор 15 входит в отверстие 16 корпуса 1, венцы 18 и 20 размыкаются, а венец 19 и шлицы 21 замыкаются. В момент захода водила 11 в паз диска 10 толкатель 24, перемещаясь по дуге Alf кулачка 23, начинает поворачиваться вокруг своей оси в обратном направлении, воздействуя кинематически на рычаги 25 и 27. Б свою очередь, рычаги 25 и 27, поворачиваясь вокруг своих осей в обратном направлении, прекращают воздействие на элемент 26 зажимного устройства инструментальных оправок в шпинделе и выталкиватель 28 инструментальных оправок из шпинделя, соответственно, инструментальная оправка зажимается. Водило 11 передает вращение через диск 10 на вал 17 и далее на привод захватов 3, которые задвигаются в корпус 4 руки. Автооператор встает в исходное положение - точки О и Р на кулачках 13 и 23.
Изобретение позволяет расширить функциональные возможности автоонератора и, тем самым, произвести дальнейшую автоматизацию станков, применяющих подобный автооператор., без увеличения количества электро-, гидро-, пневмоприводов, а так18
же цепей электроавтоматики станка, осушествляющих управление взаимосвязи кинематических цепей, что значительно удешевляет и повышает надежность механизма автоматической смены инструмента в целом.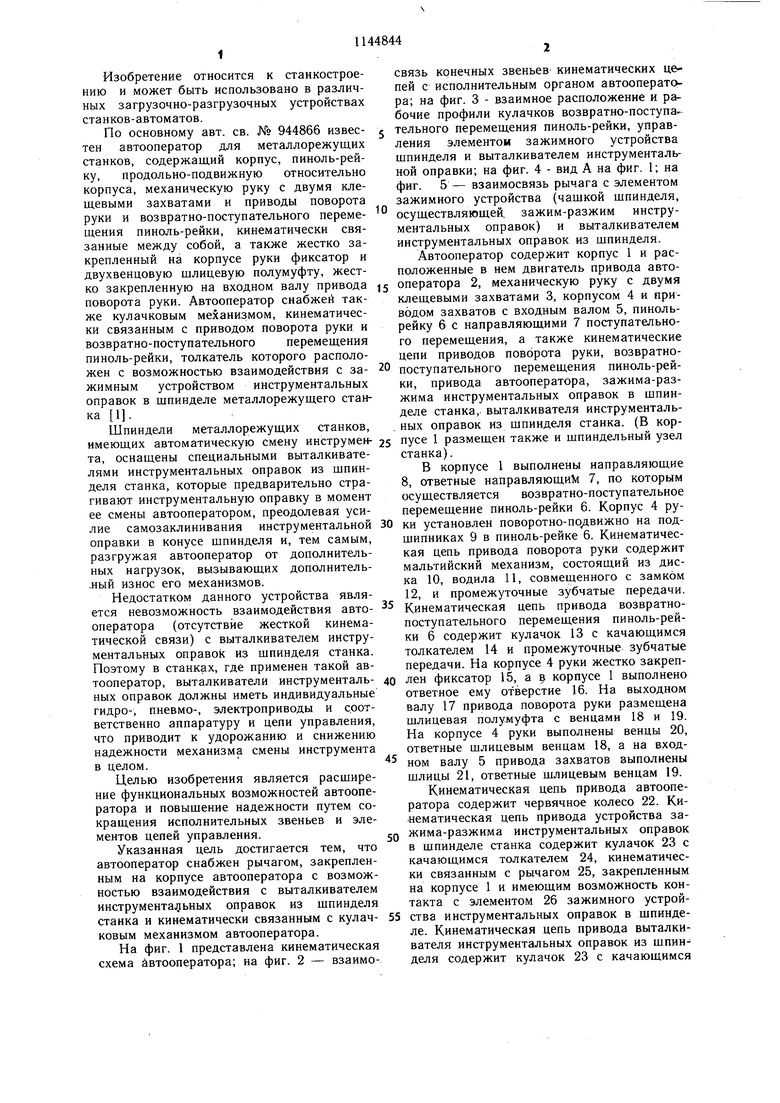
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для металлорежущих станков | 1980 |
|
SU944866A2 |
| Автооператор для металлорежущих станков | 1977 |
|
SU691274A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| АВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ЧЕРНОВОЙ ОБРАБОТКИ КОЛЕЦ НЕПРАВИЛЬНОЙ ФОРМЫ | 1969 |
|
SU252812A1 |
| Многопозиционный станок | 1980 |
|
SU891341A1 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU733960A1 |
| Захват для автоматической смены инструментальных оправок | 1978 |
|
SU703300A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
АВТООПЕРАТОР ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ по авт. ев, № 944866, отличающийся тем, что, с целью расширения функциональных возможностей и повышения надежности путем сокращения исполнительных звеньев и элементов цепей управления, он снабжен рычагом, закрепленным на корпусе автооператора с возможностью взаимодействия с выталкивателем инструментальных оправок из шпинделя станка и кинематически связанным с кулачковым механизмом автооператора.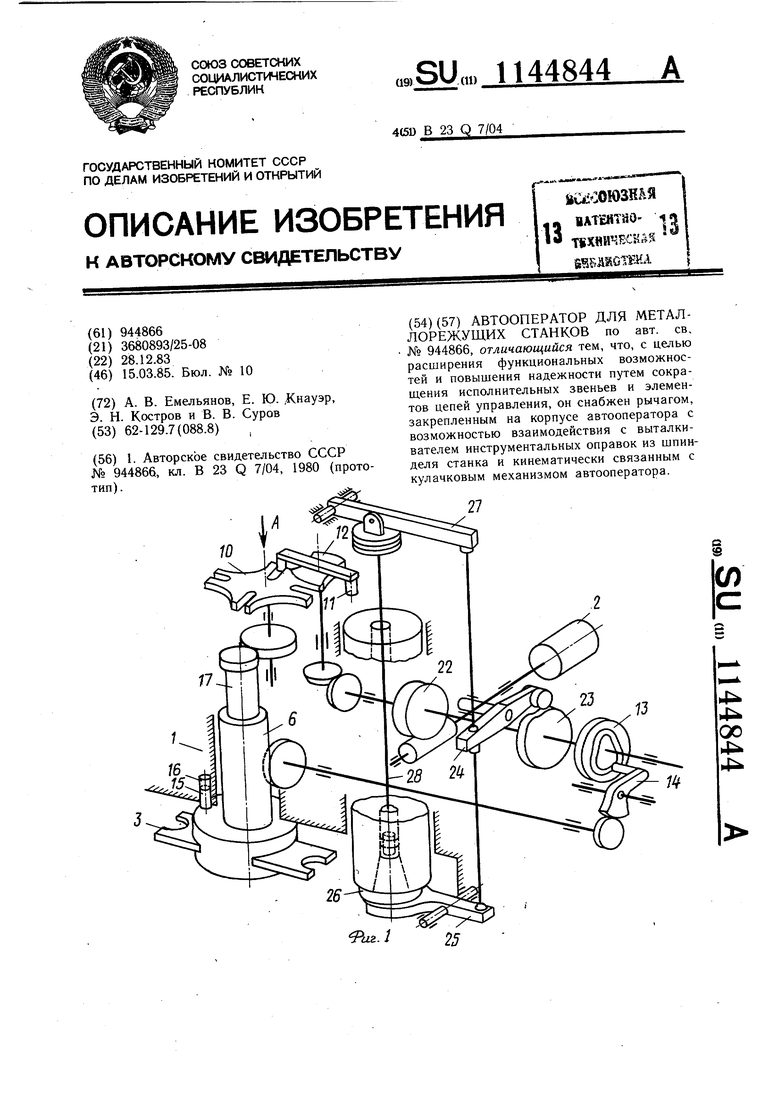
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автооператор для металлорежущих станков | 1980 |
|
SU944866A2 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
