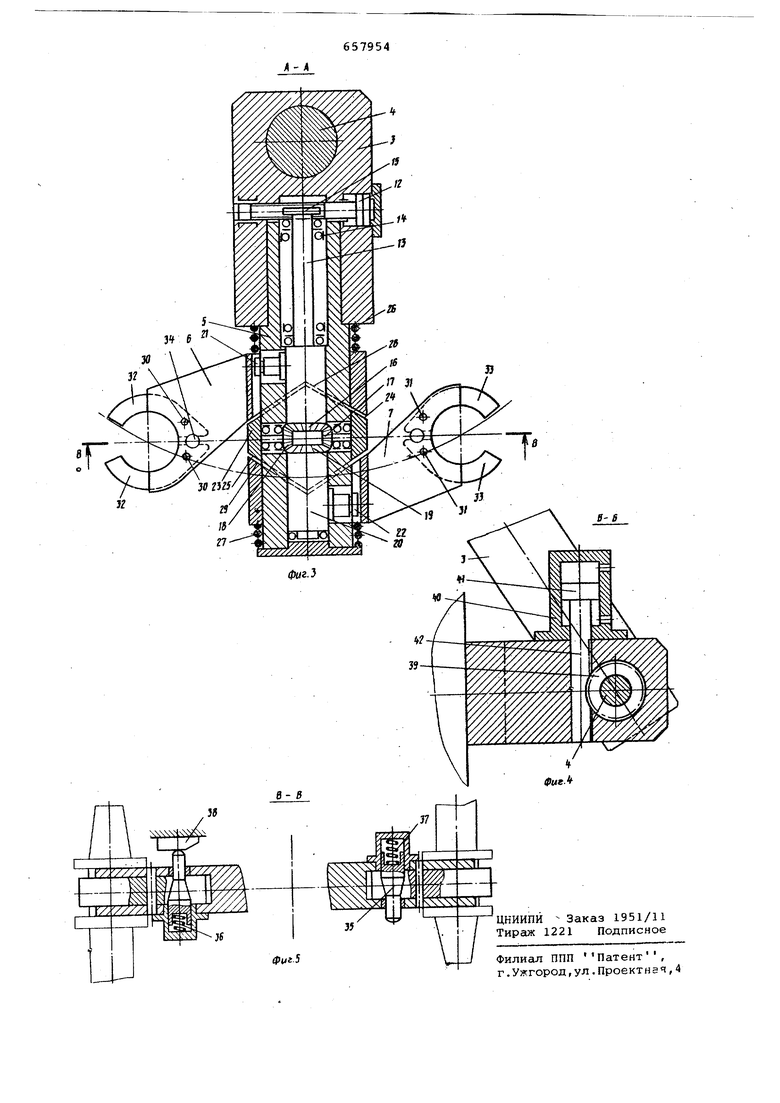
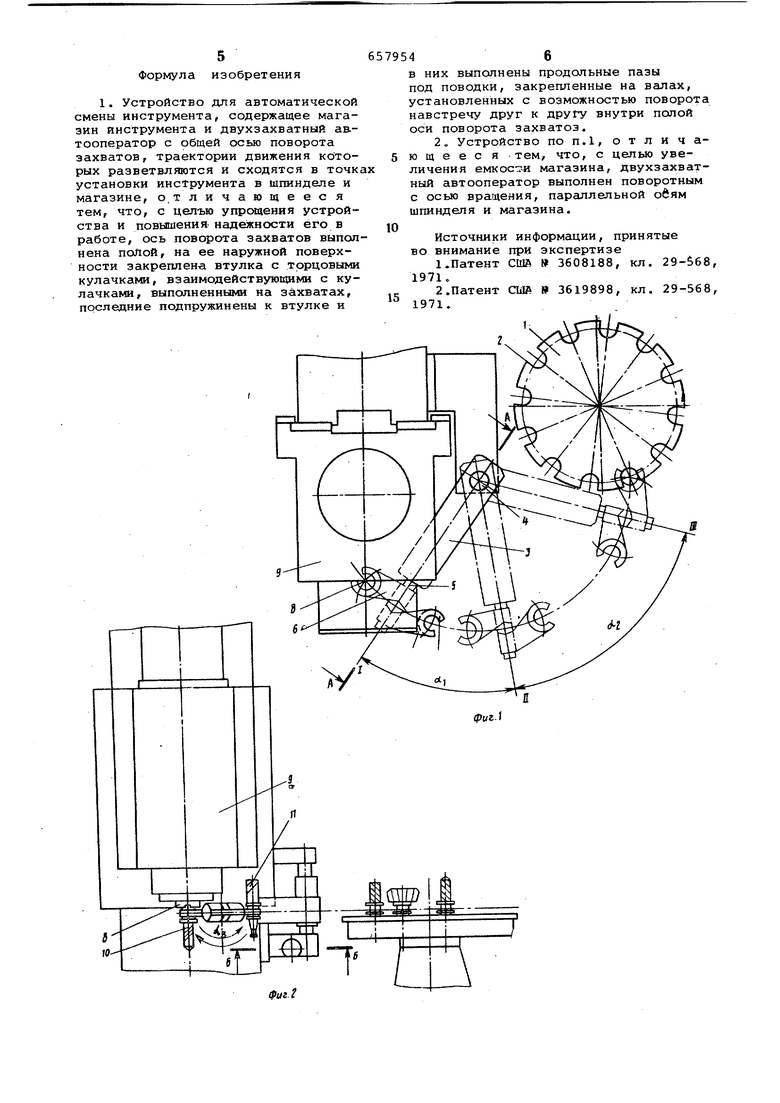
36 Сложность устройства манипулятора Цель изобретения - упрощение устройства и повышение надежности его в работво Для этого в предлагаемом устройстве ось поворота захватов выполнена полой« На наружной поверхности оси закреплена втулка с торцовыми кулачками,, взаимодействуюащми с кулачками выполненными на захватах. Последние подпружинены к втулке и в них выполнены продольные пазы под поводки, закрепленные на валах, установленных внутри полой оси. Кроме того, автооператор выполнен поворотным с ос1зю поворота, параллельной осям шпинделя и магазина. На фиг.1 изображено описываемое устройство в положении захвата инструмента в шпинделе; на фиг.2 бабка и устройство для автоматической смены инструмента, вид спереди; на фиг.З - разрез й-Д на фиг.1 (привод поворота механических рук); на фиг.4 - разрез Б-В на фиг.2 (привод поворотного рычага); на фиг.5 - раз рез В-в на фиг.З (механизм фиксации захватов механических рук). Устройство автоматической смены инструмента содержит дисковый магазин 1 с вертикальной осъао 2 вращения и поворотный рычаг 3 с осью 4 поворо та. В корпусе рычага 3 радиально устаковлена ось 5 с двумя механическими руками 6 и 7.В шпинделе 8 (фиг.2) бабки 9 смонтирован инструмент 10, который в процессе смены инструмента заменяется инструментом 11, расположенным в правой механической,руке 7. В поворотном рычаге 3 (фиг.З) рас положен механизм поворота рук с приводом от гидро- или пневмоцилиндра 1 На прийодном валу 13, который смонти розан на подши-пниках 14, установлена приводная шестерня 15, с другой стороны вала 13 - коническое зубчатое колесо 16„ которое через конические шестерни 17 и 18 соединено с другим коническим колесом 19, расположенным на валу 20. Валы 13 и 20 имеют ролики 21 и 22, которые входят в осевые пазы механических рук 6 и 7. На оси 5 закреплена втулка 23 с торцовыми кулачками 24 и 25, которы%контактируют с помсадью пружин 26 и 27 с торцовыми кулачками 28 и 29 механически рук 6 и 7. В пазах рук 6 и 7 установ лены на осях 30 и 31 захваты 32 и 33 которые фиксируются коническими фиксаторами 34 и 35 с цилиндрическими пружинами 36 и 37 (фиг.5). В положении у шпинделя фиксаторы контактирую с кулачком 38. Привод поворота рычага 3 (фиг.4) состоит из зубчатого колеса 39, закрепленного на оси 4 поворота, цилин дра 40 с поршнем 41 и зубчатой рейки 42. 4 По команде устройства ЧПУ рычаг 3 из промежуточного положения ГГ поворачивается вокруг оси 4 на угол тл захваты-32 механической руки 6 захватывают инструмент 10 в шпинделе В (фиг.1). Инструмент 10 в шпинделе 8 отжимается. В другой механической ; руке 7 в это время установлен новый инструмент 11. После отжима инструмента 10 от гидро- или пневмоцилнндра 12 через приводную шестерню 15 поворачивается на подшипниках 14 приводной вал 13, на другом конце которого находится коническое колесо 16. Колесо 16 через конические шестерни 17 и 18 поворачивает другое коническое колесо 19 с валом 20 в противоположную сторону. Ролики 21 и 22, смонтированные на валах 13 и 20 через пазы в корпусах механических рук 6 и 7 поворачивают руки 6 и 7 в противоположные стороны на уголс.з (фиг.2), производя смену инструмента. В процессе автоматической смены инструмента фиксаторы 34 и 35 через пружины 36 и 37 запирают захваты 32 и 33, предохраняя инструмент 10 и 11 от выпадания. В положении руки 6 у шпинделя фиксатор 34 скользит по скосу кулачка 38 и расфикснрует инструмент 10 в захват 32. При повороте мехнических рук 6 и 7 торцовые кулачки 28 и 29 рук 6 и&7 контактируют с торцовыми кулачками 24 и 25 втулки 23 и смЬщают руки 6 и 7 по оси 5 в противоположные стороны на величину, исключающую столкновение инструментов 10 и 11 при повороте рук. Пружины 26 и 27 постоянно поджимают торцовые кУлачки 28 и 29 рук 6 и 7 к торцовым кулачкам 24 и 25 втулки 23. После зажима инструмента 11 в шпинделе 8 бабки 9 рычаг 3 возвращается в исходное положение ГГ. Инструмент устанавливают в магазин поворотом рычага 3 на угол dев положении III. Рычаг 3 поворачивается вокруг оси 4 из исходного положения II в положения Г (к шпинделю бабки) и 1ГГ (к магазину) зубчатым колесом 39, посаженным на ось 4 поворота рычага от гидро- или пневмоцилиндра 40, поршня 41 цилиндра и зубчатой рейки 42. Таким образом, при смене инструмента в шпинделе устройство автоматической смены инструмента совершает следующие движения: 1.Поворот рычага 3 в положение Г (захват инструмента в шпинделе). 2.Поворот механических рук 6 и 7 навстречу друг другу (смена инструмента) . 3.Поворот рычага 3 в положение II (выход рычага в исходное положение) . Формула изобретения 1. Устройство для автоматической смены инструмента, содержащее магазин инструмента и двухзахватный ав.тооператор с общей осью поворота захватов, траектории движения которых разветвляются и сходятся в точк установки инструмента в шпинделе и магазине, о.тличающееся тем, что, с целъю упрсадения устройства и повьлиения надйкности его в работе, ось поворота захватов выпол нена поЛой, на ее наружной поверхности закреплена втулка с торцовыми кулачками, взаимодействующими с кулачками, выполненными на захватах, последние подпружинены к втулке и 46 в них выполнены продольные пазы под поводки, закрепленные на валах, установленных с возможностью поворота навстречу друг к другу внутри полой оси поворота захватоз. 2, Устройство ПОП.1, отличаю щ е е с я тем, что, с целью увеличения емкос::-и магазина, двухзахватный автооператор выполнен поворотным с осью вращения, параллельной обям шпинделя и магазина. Источники информации, принятые во внимание при экспертизе 1.Патент СШЙ 3608188, кл. 29-568, 1971. 2.Патент США 3619898, кл, 29-568, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| МАНИПУЛЯТОР ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТОВ | 1973 |
|
SU407708A1 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU770736A1 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU733960A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Устройство для автоматическойСМЕНы иНСТРуМЕНТОВ HA МЕТАллО-РЕжущЕМ CTAHKE | 1978 |
|
SU852163A3 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |