Рука 6 поворачивается посредством плунжер-рейки 20, находящейся в зацеплении с валом и шестерней 5 о
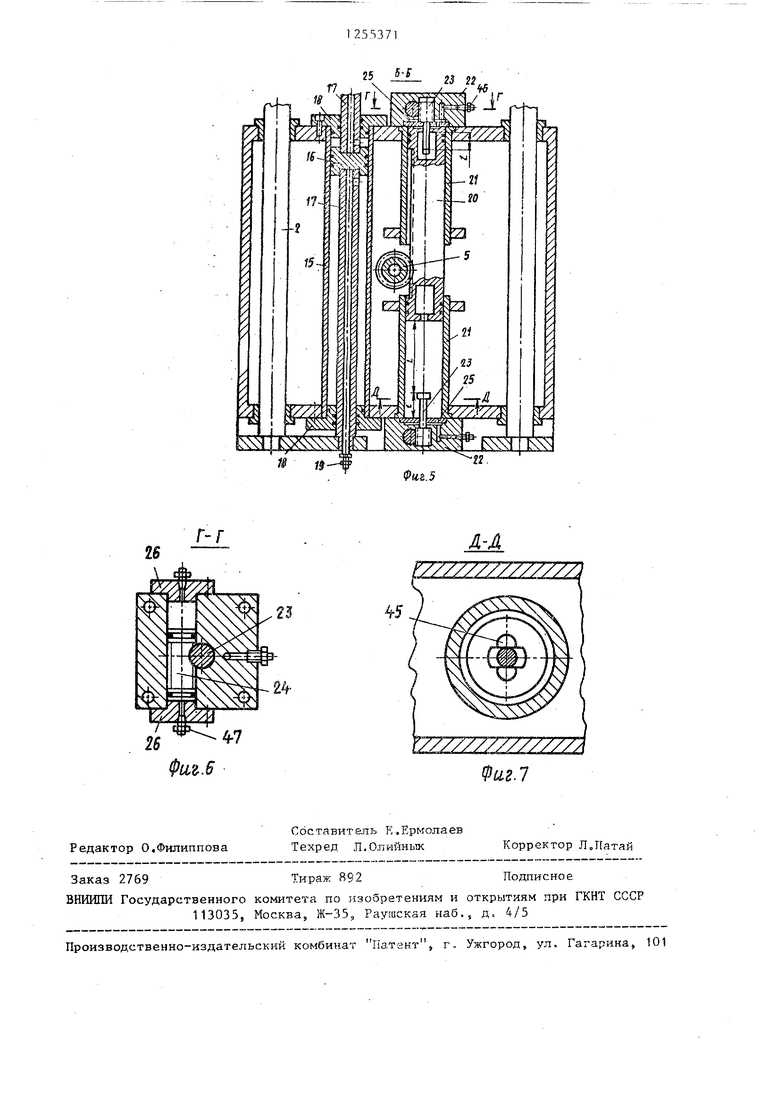
Плунжер-рейка 20 перемещается в двух цилиндрических втулках 21, закрепленных в корпусе ползушки Зо С внешних торцов цилиндрических втулок 21 установлены два корпуса 22, в которых встроены поворотные упоры 23 , взаимодействующие с ними плунжер-ранки 24, упорные кольца 25 и фпанцы 26
Рука 6 содержит захваты 27,установленные на осях 28 и контактирующие с подпружиненными упорами 29 вторыми концами о Упоры 29 взаимодействуют со скошенными поверхностями втулки 30, посаженной на штоке 31 гидроцилиндра 32 о
Шток 31 поджимается пружиной 33, прижатой к фланцу 34, который служит одновременно центрирующим элементом для инструмента 35о Масло под давлением к цилиндру 32 подводится через штуцер 36„ Штуцера 36 трубками 37 соединены со штуцерами 38, ввернут1з1- мй в конец вала с шестерней 5 Масло подводящее отверстие 39 соединено с кольцевыми проточками 40 в кронштейне 4, которые соединены со riTyiJtepaMH 41 о Подвод масла к штуцерам 41 осуществляется от гидростанции (на чертеже не показано)
Кольцевые проточки 40 разделены уплотнительными кольцами 42„ Ban с шестерней 5,несущей двухзахватную руку 6, установлен в подшипнике качения 43 Рука 6 закреплена на конической шейке вала с шестерней 5 с помощью гайки 44. На торцах плунжер- рейки 20 выполнены пазы 45, профиль которых соответствует профилю головки упора. 23.0 Для-перемещения плунжер рейки 20, поворачивающей вел с шестерней 5 и двухзахватную руку 6,масло подается под давлением через одян из штуцеров 46,
Для перемещения плунжер-рейки 24, поворачивающей упоры 23, i-jacjio подается под давлением через штуцеры 47 „
Автооператор работает следующим образом.
Смена инструмента осуществляется автоматически по запрограммированному циклу от системы ЧПУ,
Смена инструмента в вертикальном шпинделе.
В исходном положении каретка 1 находится на. направляющих траверсы 9 между инструментальным магазином
и шпиндельной бабкой станка. Ползуш- ка 3 находится в крайнем нижнем положении. По команде от системы ЧПУ включается двигатель -10„ Приводной вал 11, вращаясь через шестерню 12,
сцепленную с рейкой, перемещает каретку по направлению к инструментальному магазину По ходу перемещения каретки 1 губки захватов 27 охватывают шейку инструмента ЗЗо В это
время в гидроципиндре 32 масло находится под давлением, пружина 33 сжата, а втулка 30 отведена влево.
Для поворота вала с шестерней 5 на 180 плунжер-рейка 20 перемещается ка величину L для контакта с головкой нижнего упора 23. Нижний упор 23 находится при этом в положении (см. фиго5), когда головка нижнего упора расположена под углом 90 к
пазу 45, вьтолненному на торце плунжер-рейки 20с Головка верхнего упора 23 в зто время расположена вдоль со- ответствукиЦего ответного паза на верхнем торце плунжер-рейки 20,благодаря чему поршень-рейка 20 свободно проходит через верхний управляе- мьш упор и останавливается у нижнего упора После поворота руки 6 на 180° ползушка 3 перемещается вверх,
вставляя новьй инструмент в конус шпинделя Давление масла в гидроцилиндр 15 на перемещение ползугаки 3 подается через нижний штуцер 19о Подачей давления в полость гидроцилиндра 32 шток 31 перемещается в осевом направлении, сжимая пружину 33 и отводя втулку 30 из-под упоров 29о
При движении каретки 1 от шпиндельной бабки губки захватов 27,
скользя на цилиндрической поверхности шейки инструмента, поворачиваются на осях 28, утапливая подпружиненные упоры 29с.
Таким образом захваты 27 выходят
из контакта с инструментом 35оИнстру- ыент, вынутый из шпинделя бабки,поставляется автооператором к магазину и движением ползугаки 3 вниз вставляется в соответствующее гнездо магаяннар Каретка 1 перемещается по траверсе 9 от магазина и останавливается в исходном положени1-То
Смена инструмента в горизонтальном шпинделе,
Перемещение каретки 1 из исходного положения к магазину,, захват инструмента и извлечение его из гнезда магазина происходит аналогично циклу g смены в вертикальном шпинделе.После этого рука 6 поворачивается на 90 по часовой стрелке, что соответствует перемещению 1 плунжер-рейки 20„ Для этого верхний упор 23 движением плун- Ю жер-рейки 24 поворачивается на 90, головка упора 23 при этом располагается перпендикулярно пазу, вьтолнен- ному в верхнем торце плунжер-рейки 20,
ка 3 перемещается в крайнее верхнее положение, выводя захваты 27 из контакта с инструментом, и каретка 1 перемещается от головки к магазину,
Формула изобретения
I о Автооператор для автоматической смены инструментов, содержащий каретку с установленной на ней с воз можностью перемещения в направлении, перпендикулярном направле шю переме щения каретки, ползушкой, на которой
Плунжер-рейка 20 при подаче давле- 5 размещен поворотный от привода, выния в верхнюю полость втулки 21 через, штуцер 46 из крайнего верхнего положения, переместившись вниз на величину 1, остановится, упираясь в головку верхнего упора 23 Затем автооператор перемещается к накладной головке с горизонтальным шпинделем и останавливается в позиции, соответ- .ствующей захвату инструмента. Захват инструмента в головке производится движением ползушки 3, а выдергивание инструмента из конуса шпинделя - движением каретки 1 по траверсе 9 от головки
Операции зажима-отжима инструмента в руке 6 вьтолняются аналогично предьщущему циклу.
Поворот руки 6 на 180° после выдергивания инструмента из конуса шпинделя осуществляется дальнейшим перемещением плунжер-рейки 20 вниз до упора в кольцо 25, т.е, плунжер- рейка 20 опускается вниз еще на расстояние LO
Для осуществления этого движения верхний упор 23 поворачивается на 90, освобождая путь плунжер-рейки 20, в таком же положении по отношению к своему пазу 45 должен находиться нижний упор 23. После установки нового инструмента в конус шпинделя движением каретки 1 к головке ползушка 3 перемещается в крайнее верхнее положение, выводя захваты 27 из контакта с инструментом, и каретка 1 перемещается от головки к магазину,
Формула изобретения
I о Автооператор для автоматической смены инструментов, содержащий каретку с установленной на ней с возможностью перемещения в направлении, перпендикулярном направле шю перемещения каретки, ползушкой, на которой
полненного в виде плунжера-рейки, вал с двухзахватной механической рукой, имеющей в каждом захвате гнездо для закрепления инструмента, о т л ичающийся тем, что, с целью повьшения надежности за счет упрощения конструкции, захваты жестко связаны с механической рукой, а оси их гнезд расположены в плоскости,перпецдикулярной оси поворота вала, разнесены по разные стороны от упомянутой оси и параллельны друг другу,при этом поворотный вал расположен перпендикулярно направлению перемещения
каретки и ползуики, а привод его поворота выполнен с возможностью фиксации механической руки в вертикальном и горизонтальном положении осей гнезд ее захватов.
2 о Антооператор по п,, отличающийся тем, что он снабжен управляемыми упорами, выполненными в виде стержней с профилированными головками и установленными на ползушке с возможностью поворота вокруг своих продольных осей, при этом на торцах плунжера-рейки выполнены ответные под головки стержней пазы и расположенные за ними цилиндрические
проточки с глубиной большей высоты упоров и диаметром большим максимального размера головок упоров.
g
Фаг.г
J2
36
Фиг.
«2.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Портальный станок с автоматической сменой инструмента | 1988 |
|
SU1558629A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Многооперационный станок портального типа | 1989 |
|
SU1742029A1 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU770736A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| МНОГОЦЕЛЕВОЙ СТАНОК С УСТРОЙСТВОМ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА | 1994 |
|
RU2108218C1 |
| Гибкий производственный модуль | 1986 |
|
SU1342668A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |


Изобретение относится к станкостроению и может быть использовано Изобретение относится к станкостроению и может быть использовано в многоцелевых металлорежущих станках, предназначенных для комплексной обработки деталей. Целью изобретения является упрощение конструкции устройства. На фиг. 1 изображен автооператор, общий вид; на фиг. 2 - то же, вид слева; на фиг. 3 - разрез А-А на фиг о 1; на фиг. 4 - разрез Б-Б на фиго1; на фиг о 5 - разрез В-В на фиг о2; на фиг 6 - разрез Г-Г на фиг„5; на фиг 7 - разрез Д-Д на фиг.5 о Автооператор содержит каретку 1 , несущую две ципивдрические направляющие 2, по которым перемещается пол- зушка 3, На ползушке 3 закреплен кронщтейн 4 с поворотным валом и закрепленной на валу шестерней 5,на котором установлена двухзахватная рув многоцелевых металлорежущих станках Цель изобретения - упрощение конструкции. Для этого захватные части 7 и 8 двухзахватной руки 6 установлены на ползушке 3 каретки 1, причем оси гнезд захватных частей 7 и 8 расположены в плоскости,перпендикулярной оси поворота руки 6. При повороте последней на 90 и 180 инструменты, расположенные в гнездах хвостовиками наружу, могут быть загружены в щпиндель станка, расположенный как вертикально, так и горизонтально, 1 ЗоПо , 7 ил. ка 6 о Рука имеет захватные части 7 и 8, расположенные под углом 90 к корпусу руки и направленные в противоположные стороны. Привод перемещения каретки 1 по траверсе 9 содержит двигатель 10, приводной вал 11, на котором закреплена щестерня 12, зацепляющаяся с рейкой 13,, По нaпpaвляюпJцм траверсы 9 каретка перемещается на опорах качения 14,Вертикальное перемещение ползуш- ки 3 осуществляется от гидроцияиндра 15,содержащего поршень 16, который заперт между двумя штоками 17. Штоки 17 от осевого смещения закреплены в кронштейнах ползутки 3 и направляются во фланцах 18. Подвод масла под давлением в гидроцилиндр 15 производится через штуцеры 19. (Л с
г-г
/23
д-л
Фиг.7
Редактор О.Филиппова
Составит&пь ;.Ермолаев Техред Л.Олиннык
Заказ 2769Тираж 892Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35,, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г, Ужгород, ул. Гагарина, 101
Корректор Л.Патай
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
