Изобретение относится к приводам копающих механизмов экскаваторсв- драглайнов и предназначено для управления при регулировании натяжного подъемного каната и в процессе черпания грунта, и является усовершенствованием системы стабилизации натяжения подъемного каната экскаватора-драглайна по авт, св. № 599023.
Цейьго изобретения является устранение возможности образования слабины подъемного каната при любых положениях ковша путем коррекции заданного усилия привода подъема.
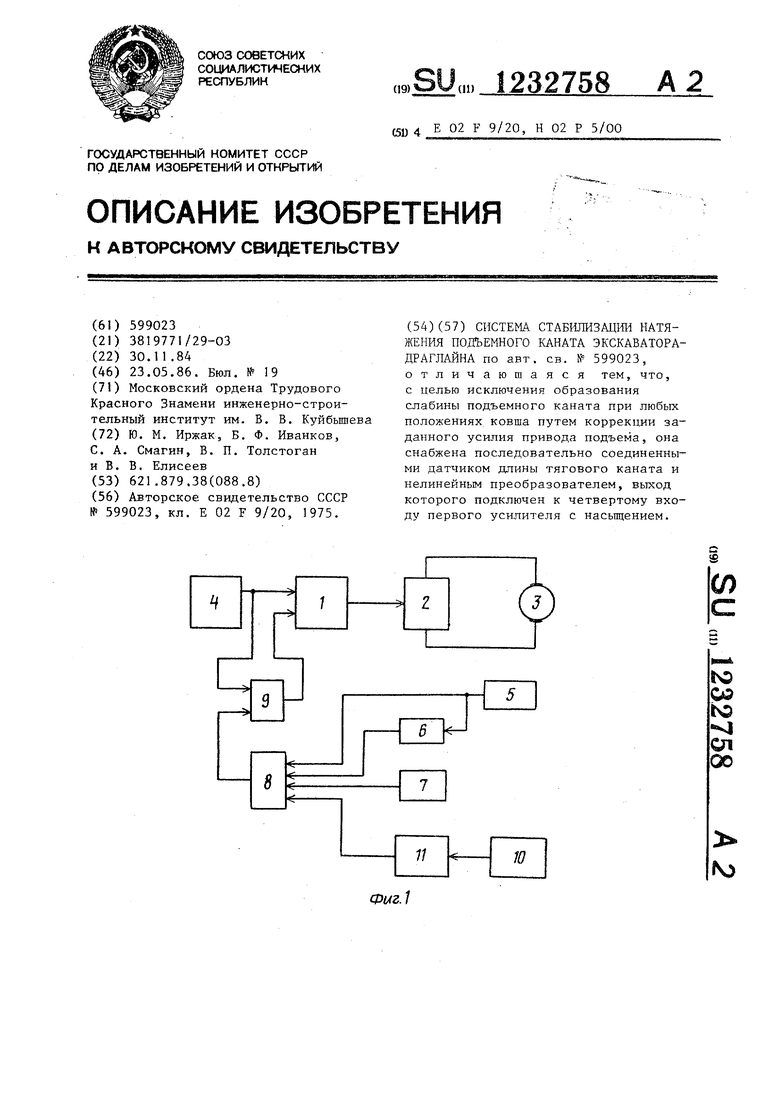
На фиг. 1 изображена функциональная схема системы стабилизации натяжения подъемного каната экскаватора на фиг. 2 - характеристика первого усилителя; на фиг. 3 - характеристика второго усилителя.
Система содержит устройство 1 управления приводом подъема, преобра- лователь 2, двигатель 3, командоап- гарат 4, датчик 5 статической составляющей тока, датчик 6 производной статического .тока, задатчик 7 натя-- жения подъемного каната, первый уси- лителъ 8 с насьпценнем, второй усилитель 9 с насыщением, датчик 10 длины тягового каната и нелинейньм преобразователь 11 .
Устройство 1 управления приводом подъема I подключено к преобразователю 2, питающему двигатель 3, Первый вход устройства 1 управления приводом подъема связан с командо- контроллером 4,
Датчик 5 статического тока датчик 6 производной статического тока и задатчик 7 натяжения подъемного каната подключены ко входам первого усилителя 8, выход которого подключе к одному из входов второго усилите- ля 9 с насьщением, к другом;/ входу которого подключен командоконтроллер 4,- Датчш 10 длины тягового каната Через нелинейный преобразователь i1 подключен к входу первого усилителя 8.
Выход второго усилителя 9 соединен со входом устройства утгравле- ния приводом подъема
Система работает следз ощим образом i
Сигнал с выхода задатчика 7 натяжения действует на вход однополярно- го усилителя 8 с характеристикой, показанной на фиг, 2, в сторону увеличекия его выходного сигнала, а сигнал с ньгхода датчика 5 статического тока иг Кзат обратную полярность. Поскольку статический ток двигателя
3 однозначно характеризует натяжение подъемного 1-:аната на ободе барабана, то уг-илитель 3 вьшолняет функцию регулятора натяжения подъемного каната. При натяжении каната меньшем
заданного имеется напряжение на выходе первого усилителя 8., а нри натн женин каната большем заданного выход этог(5 усилителя равен нулю. Датчик 7 производной статического тока включается на вход первого усилителя 8 для устранения колебательности при стабилизации натях ения подъемного канала.
Сигнал с Еьгхода первого усилителя 8,, поступгтэ;дий на вход второго усил1-;теля 9, действует в сторону увеличения его выходного напряжения. При отсутствии сигналов на входе второго усилителя 9 его характеристика
имеет вид I2а (фиг- 3). Напряжение с выхода командоаппарата 4; напряБлен- кое Е а спуск коЕШгЗ., действует в сторону увеличения вьпходного напряжения (Второго усилителя 9. Напряжение на
выходе командоаппарата 4э соответствующее крайнему положению на Спуск или Подьек ковша., смещает характеристику второго усилителя 9 соответственно в положение 126 или
2в.
Максимальный сигнал с вькода первого усилителя 8 в два раза по моду- 1лю превьшает максимальный сигнал с (выхода коыандоконтроллера 4. Такая
полярность и соотношения по величине сигналов., поступающих на входы второго усилителя 9, обеспечивает получение на выходе этого усилителя с: 1гна- ла. равного
и
кк
-РСГ
UKK
-ц,,, при UPPP Ц. о при -1 . и ,
напряжения на выходе первого усилителя 8| мапря71{ение на выходе ко- мандоаппарата 4, измеренное от максшлального сигнала нг. Спуск ковша.
ПоЗ ТОму су7.1марный сигнал на входе систе(. :ы згправления i равен наибольшему из ABji x сигналов - с вькода командо- аппара.та 4 подъема или с вьпсода первого 5 си.пителя B,j являющегося регуляторе ., натяжеиия подъемного .
Таким образом, при уменьшении натяжения подъемного каната меньше заданного появляется напряжение на выходе первого усилителя 8. Если коман- доаппарат 4 находится в положении, отличном от крайнего на подъем ковша, то на выходе второго усилителя 9 также появляется напряжение и скорость двигателя 3 увеличивается в направлении выбора слабины подъемного каната.
Анализ кинематической .связи ковша с подъемным барабаном показывает, что для вьтолнения задачи поддержания постоянного натяжения упряжи ковша, а не на ободе барабана, усилие привода должно изменяться в зависимости от положения ковша согласно уравнению: F, , (1)
где f- удельный вес каната;
d.Fl. d Y
стабилизируемое натяжение подъемного каната у упряжи ковша;
TL.
у ach
Т - горизонтальная составлягош;ая
усилия, действующая на упряжь;
1.ь , ,.
а 1 1 - длина тягового каната;
Ь, с - параметры, зависящие от кон- структивнь х размеров экскаватора и угла наклона забоя. Анализ трансцендентного управле- 0 ния на ЦВМ позволяет выявить, что в зоне возможных при черпании грунта положениях ковша величина усилия двигателя подъема, требуемая для поддержания постоянного натяжения подъем- 5 ного каната у упряжи, незначительно зависит от угла наклона забоя и длины подъемного каната, а нелинейно зависит от длины тягового каната.
Функциональная зависимость между 0 длиной тягового каната, определяемой с помощью датчика 0, реализуется нелинейным преобразователем 11,
Испытания в производственных условиях на экскаваторе ЭШ-20.90 5 (зав. № 10) показывают, что система стабилизации натяжения подъемного каната обеспечивает удержание на весу упряжи ковша при любых его положениях в забое.
напряжение на 8ходе сриг.2
Напряжение на входе Фиг.З
Редактор П. Коссей
Заказ 2744/31Тираж 641
ВНИИШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
CocTaBHTejrb Р. Гладун
Техред И.Верес Корректор Е. Рошко
Подписное
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1975 |
|
SU599023A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
