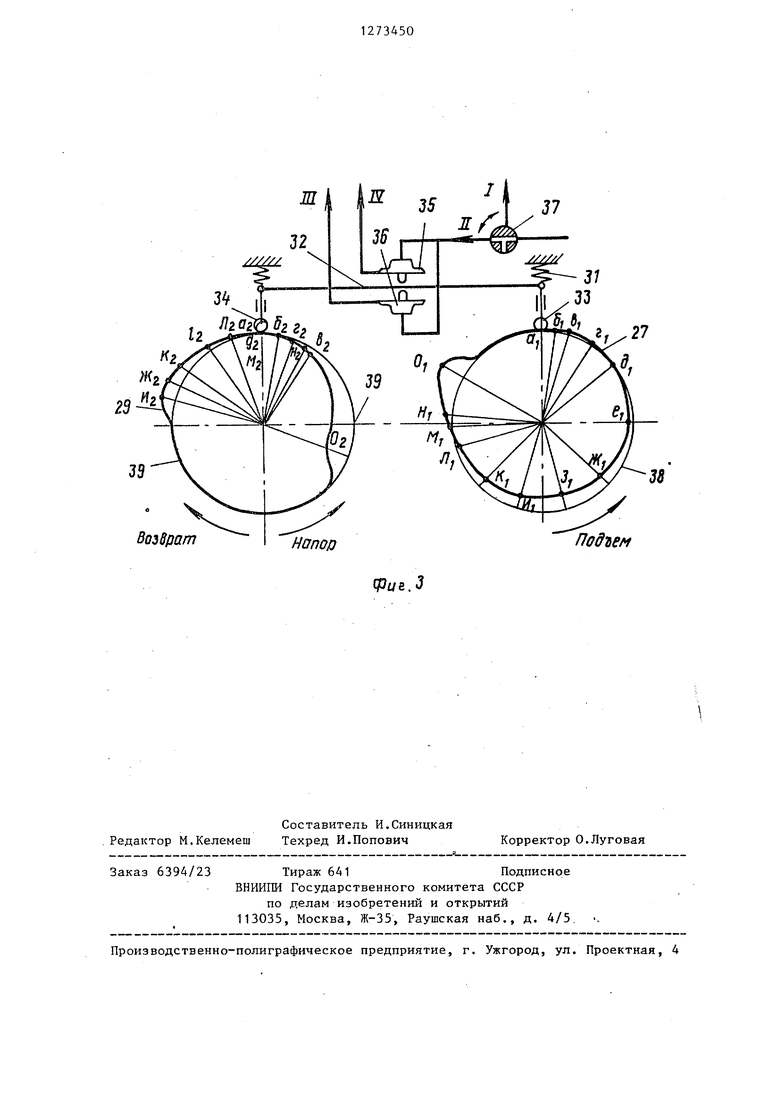
1 Изобретение относится j землеройным машинам, а конкретно к одноковшо вым экскаваторам с механическим приводом. Цель изобретения - упрощение управления. На фиг. 1 изображена схема рабочего оборудования экскаватора и траектории движения ковша, вид сбоку; на фиг. 2, 3 схема управления барабанами главной лебедки. На поворотной платформе 1 размещена главная лебедка с подъемным 2 и напорным 3 барабанами, передающими вращение на напорно-возвратньй барабан 4, а также устройство управления экскаватором 3. Рабочее оборудование экскаватора состоит из стрелы 6, рукояти 7 с ковшом 8, седлового подшипника 9, подъемного каната 10, напорного каната 11 и возвратного каната 12. Дугой 13 и прямыми 14 показаны действительная и заданная траектория движения зубьев ковша Линиями и точками а , & , о показаны последовательные положения рабочего оборудования экскаватора при повороте рукояти на угол 0-100 °, позиции Ь -18°, через каждые q- 23°30 и м - 84 дают характерные точки траектории движения зубьев ковша. Заштрихованные площадки со знаком + ограничивают участки траекторий, когда должен быть включен напорный механизм, а площадь со знаком - - участок, когда должен быть включен механизм возврата рукояти с ковщом. Устройство содержит ведущие звездочки 15 и 16, закрепленные соответственно на подъемном 2 и напорном 3 барабанах, ведомые звездочки 17 и 18, редукторы 19 и 20 и фрикционные муфты, состоящие из сцепных дисков 21 и 22, упорньк дисков 23 и 24 и пружин 25 и 26, iipoфильного задающего кулака 27 с высту пами 28 для установки его в исходное положение и профил ьного исполнительного кулака 29 с выступами 30. К профильным образующим кулаков пружинами 31 через толкатели, соединенные гибкой тягой 32, прижимаются ролики 33 и 34. С обеих сторон тяги 32 в средней ее части помещены пнев мо или гидроклапаны 35 и 36 включения напора и возврата, воздух к кот рым подается через трехходовой . .кран 37. 0 Расчеты профилей задающего и исполнительного кулаков выполнены относительно окружностей 38. Для каждой позиции рабочего оборудования экскаватора ( а , 8 , 1 , ...,о) графически определены величины подъема ковша (разница между позициями: ci, Ь т.д.), длина ,, подъемного каната И , наматываемого на подъемньм барабан, угол его поворота (р( Г /1 D g-360 ) и . угол поворота задающего кулака (В сСп5/1 ц). Передаточное число передачи от подъемного барабана на задающий кулак (1.к) определено из отношения угла поворота подъемного барабана при подъеме ковша от подошвы забоя на максимально возможную высоту к углу, ограничивающему рабочий диапазон задающего кулака (принят 300 ). Для каждой позиции ковша с рукоятью графически определена величина напорного или возвратного перемещения рукояти и в масштабе отложена на соответствующем радиусе от окружности 38 до соответствующих точек профиля (а, , &, Д, ,,0, ) напорные движения в сторону увеличения радиуса, а возвратные движения в сторону уменьшения радиуса от окружности 39. Аналогично выполнен расчет и построение профиля исполнительного кулака, с той лишь разницей, что напорное движение рукояти должно обеспечиваться поворотом напорного барабана и исполнительного кулака в одну сторону, а возвратное движение в другую (см. стрелки на фиг. 3). Передаточное число передачи между напорным барабаном и исполнительным кулаком , определено как отношение угла поворота напорного барабана при полном ходе рукояти вдоль ее оси деленного на угол 300 . Для калодого заданного профиля забоя необходимо иметь свою пару задающего и исполнительного кулаков. Устройство расположено на поворотной платформе между подъемным и напорным барабанами и работает при переключении трехходового крана, установленного -на пульте управления, после окончания чернового копания. Устройство работает следующим образом.
При необходимости перейти на зачистку забоя трехходовой кран 37 переключают на подачу воздуха к пневмоаппаратам 35 и 36 (канал It).
При включении подъемного барабана ковш экскаватора из положения а переместится в положение о (фиг. 1) При этом задающий кулак также повернется в положение В, (фиг. 3) и ролик 38 с толкателем повернет тягу 32 против часовой стрелки относительно точки опоры ролика 34 на исполнительный кулак 29, так как радиус профиля задающего кулака увеличивается. Средней частью тяга 32 включает пневмоаппарат 35 и подает воздух по каналу IV к муфте напорного механизма. Напорньш барабан 2 и исполнительный кулак 29 поворачивают в сторону напора рукояти против часовой стрелки. В момент, когда точка S профиля исполнительного кулака окажется под роликом 34, левый конец тяги 32 опускается и выключает напорный механизм, так как превышение радиуса профиля задающего кулака в точке S, над радиусом окружности 38 равно разнице радиуса окружности 39 над расстоянием точки 5„ от центра оси исполнительного кулака. В случае, если скорость напорного движения рукояти превышает необходимую для данной точки заданного профиля забоя, левый конец тяги 32 опускаетс на величину больше требуемой и вклю2В 2tt 23 25
чает пневмоаппарат 36 механизма возврата рукояти (канал III). образом, напорно-возвратное движение рукояти следит за подъемным движением ковша. Тяга 32 выполняет роль обратной связи от исполнительного механизма устройства к задающему. Ее упругость исключает резкие включения исполнительньк механизмов и стабилизирует процесс.
При дальнейшем подъеме ковша и повороте задающего кулака после характерной точки Ь (18 ) включается механизм возврата рукояти (так как превьш1ение точки -г, над окружностью 38 меньше превышения точки 5, ) и напорный барабан с исполнительным кулаком, поворачиваясь по часовой стрелке, осуЕ1,ествляет перемещение рукояти в сторону от забоя.
Далее работа устройства происходит аналопгчно, заставляя зубья ковша перемещаться по заданной траектории забоя.
Отключить устройство управления напорно-возвратным движением рукояти и перевести процесс копания на ручное управление можно трехходовым краном 37, направив воздух по каналу 1.
При изменении позиции экскаватора (его перемещение, наклон стрелы) задающий и исполнительный профильные кулаки с помощью выступов 28 и 30 ставят в исходное положение.
JJ
I Л
-2 BosSffam HanoD
Фив.З Подъем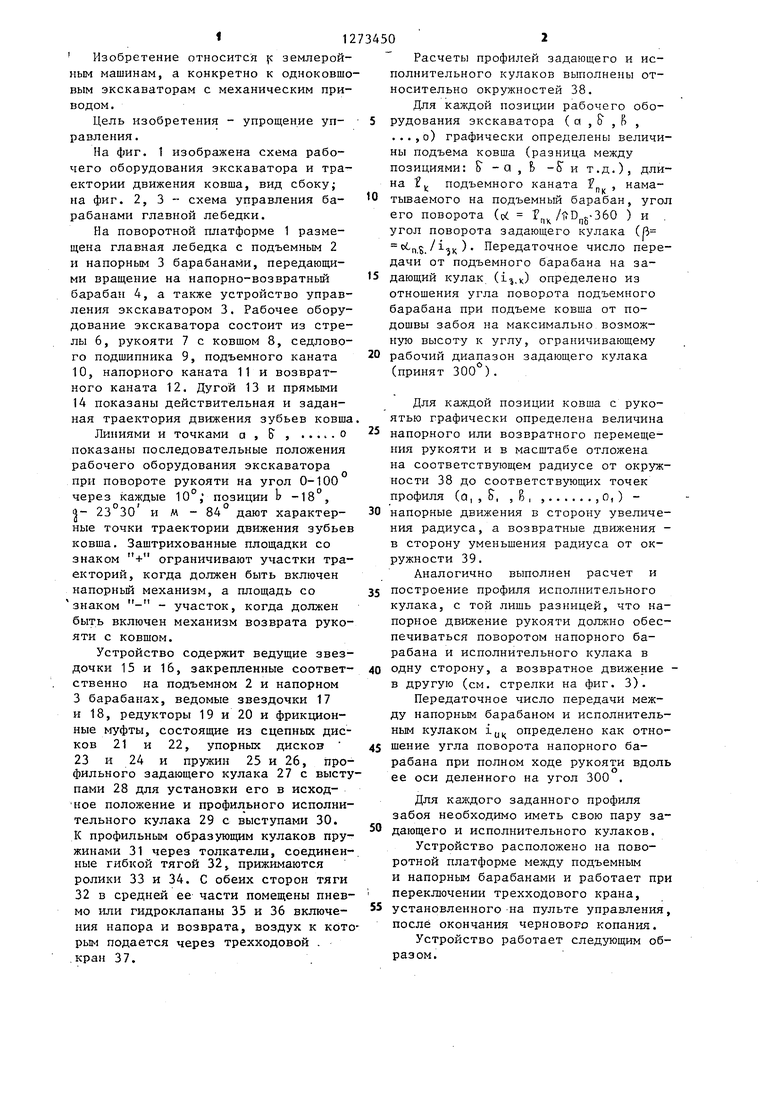

| название | год | авторы | номер документа |
|---|---|---|---|
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| Экскаватор-лопата | 1976 |
|
SU663785A1 |
| Грейфер | 1978 |
|
SU742541A1 |
| МЕХАНИЗМ ЗАВИСИМОГО НАПОРА ОБОРУДОВАНИЯ ПРЯМОЙ ЛОПАТЫ ЭКСКАВАТОРА | 1967 |
|
SU214418A1 |
| СМЕННОЕ ПОГРУЗОЧНОЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ ЭКСКАВАТОРУ | 1969 |
|
SU256654A1 |
| Траншейный экскаватор | 1979 |
|
SU815154A1 |
| Траншейный экскаватор | 1977 |
|
SU651089A1 |
| Одноковшовый экскаватор | 1991 |
|
SU1799414A3 |
| Рабочее оборудование одноковшового экскаватора | 1975 |
|
SU692941A1 |
РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА, включающее расположенные на платформе стрелу, ,рукоять с ковшом, главную лебедку с подъемным и напорным канатными барабанами, содержащими муфты и тормоза, управляемые аппаратами, отличающееся тем, что, с целью упрощения управления, оно снабжено расположенным на платформе механизмом управления аппаратами, выполненными в виде кинематически связанных с подъемным и напорным канатными барабанами задающего и исполнительного профильных кулаков с подпружиненными толкателями, одни концы которых имеют ролики, расположенные с возможностью взаимодействия с задающим и исполнительным профильными кулаками, а другие связаны между собой посредством тяги, расположенной с возможностью взаимодействия с аппаратами. (Л 7 а 1о18 го
| Патент США № 4268214, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ВПТБ^ц^-^пьГПТПЦ0:>&-.S:;;.( i Ь «J i | 0 |
|
SU397603A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
