2. Привод, по п. 1,отличающ и и с я тем, что управлякяцие устройства муфт выполнены в виде закрепленных на основании электромагнитов, . установленных с возможностью взаимодействия с толкателями.
3. Привод поп.1,отличающийс я тем,что управляющее устройство подвижной муфты выполнено в виде дополнительной заклинивающей муфты кинематически связанной с толкателем я установленной на рейке с возможностью взаимодействия с основной муфтой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговой подачи изделий | 1979 |
|
SU856723A1 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1979 |
|
SU871924A1 |
| Электродвигатель возвратно-поступательного движения | 1989 |
|
SU1721740A1 |
| Линейный электропривод | 1987 |
|
SU1457106A1 |
| Инклинометр | 1982 |
|
SU1102914A1 |
| Устройство для дозированной раздачи корма в клеточной батарее для птиц | 1983 |
|
SU1202535A1 |
| Электромагнитная муфта сцепления | 1985 |
|
SU1275156A1 |
| Полуавтоматический станок для продороживания коллекторов якорей электрических машин | 1961 |
|
SU140873A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2000 |
|
RU2171406C1 |
| ТОКАРНАЯ СИЛОВАЯ ГОЛОВКАт~—^~"I | 1972 |
|
SU346033A1 |
I. ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА, содержащий закрепленный на основании силовой цилиндр с поршнем и штоком, жестко связанным с 23 12 If }3 у W fVAl /6 рейкой, на которой расположены два упора, установленные между ограничителями основания с возможностью взаимодействия с последними и имеющие управляющие устройства, о т л и чающийся тем, что, с целью расширения функциональных возможностей, упоры снабжены коническими заклинивающими муфтами, установленными на рейке с противоположными направлениями заклинивания одной из них относительно другой, с-толкателями, размещег1ными с возможностью взаимодействия с заклинивающими элементами муфт и связанными с управляющими устройствами, причем одна (Л из муфт закреплена относительно основания неподвижно, а другая с возможностью перемещения. оа СП со сх MJ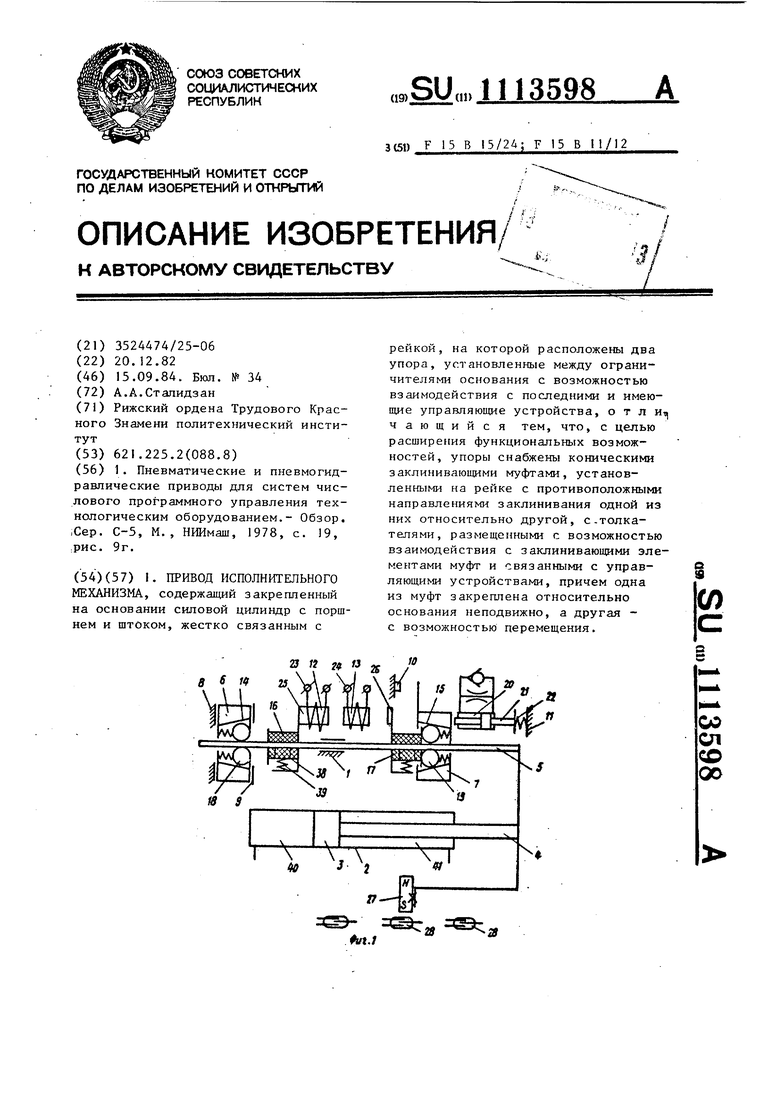
Изобретение относится к машиностроению и может быть использовано в .шшeнныx роботах.
Известен привод исполнительного механизма, содержащий закрепленный на основании силовой цилиндр с поршнем и штоком, жестко связанным с рейкой, на которой расположены два упора, установленные между ограничителями основания с возможностью . взаимодействия .с последними и имеющие управляюшле устройства t1.
Недостатком известного устройства является ограниченные функциональные возможности из-за сложности регулиро ки хода поршня за один шаг.
Целью изобретения является расширение функциональных возможностей.
Указанная цель достигается тем, что в приводе исполнительного механи ма, содержащем закреппенньтй на основании силовой цилиндр с поршнем и штоком, жестко связанным с рейкой, на котором расположеШ) два упора, установленные между ограничителями основания с возможностью взаимодействия с последними и имеюш е управляющие устройства, упоры снабжены конически1-1И заклинивающими м фтами, установленными на рейке с противоположным направлением заклинивания одной из них относительно другой, с толкателями, размещенными с возможностью взаимодействия с заклиниваюци-ми элементами муфт и связанными с управляющими устройствами, причем одна из муфт закреплена относительно основания неподвижно, а другая - с возможностью перемещения.
Кроме того, в приводе управляющие устройства муфт выполнены в виде за-, крепленных на основании электромагнитов, установленных с возможностью взаимодействия с толкателями.
Управляюцее устройство подвижной муфты выполнено в виде дополнительной заклинивающей муфты, кинематически связанной с толкателем и установленной на рейке с возможностью взаимодействия с основной муфтой.
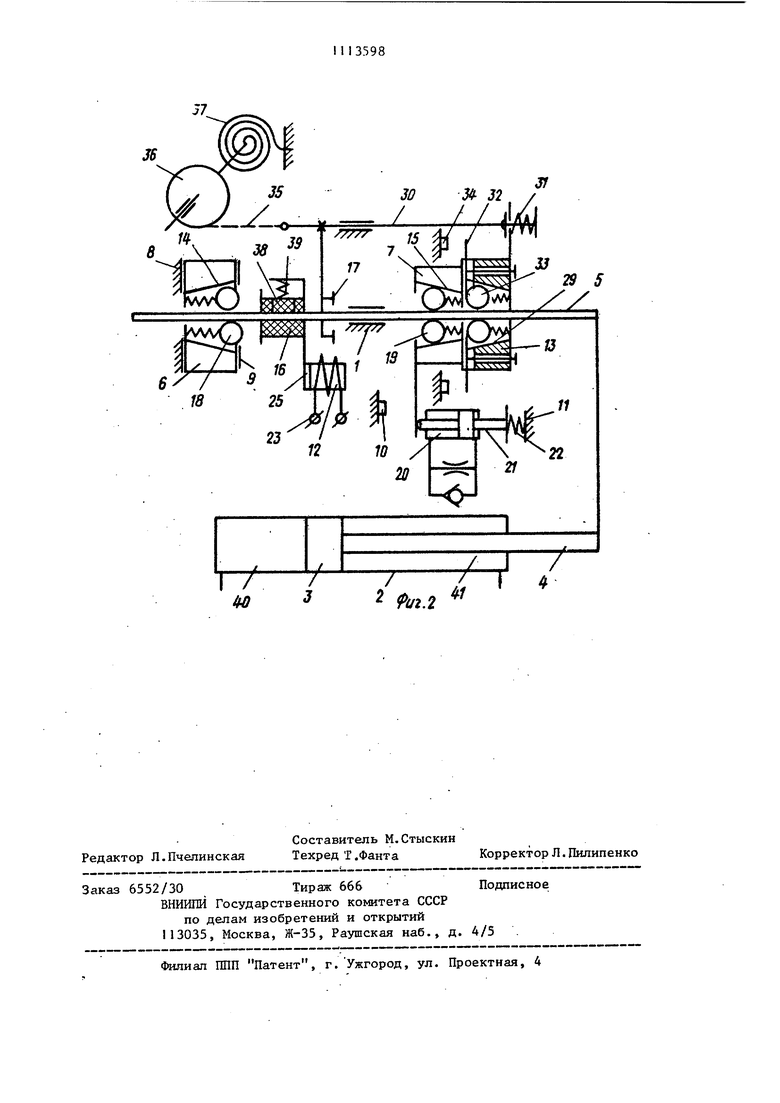
На фиГ. 1 представлен привод исполнительного механизма с управляющими устройствами в виде электромагнитов; на фиг. 2 - то же, с дополнительной заклинивающей муфтой.
Привод исполнительного механизма содержит закрепленный на основании 1 силовой цилиндр 2 с поршнем 3 и штоком 4, жестко связанным с рейкой 5.На рейке 5 расположены два упора 6 и 7, установленные между ограничителями 8-11 основания 1 и имеющие управляюшле устройства 12 и 13. Упор 6 снабжен конической заклинивающей муфтой 14, а упор 7 муфтой 15, установленными на рейке 5 с противоположным направлением заклинивания одной из них относительно другой. Муфты 14 и 15 имеют толкатели 16 и 17, размещенные с возможностью взаимодействия с подпружи|ненными заклинивающими элементами 18 и 19. Муфта 14 закреплена относительно основания 1 неподвижно, а муфта 15 - с возможностью перемещения. Муфта 15 снабжена-демпфером 20, ,щток 21 которого поджат пружиной 22.
В приводе на фиг.1 управляющие устройства 12 и 13 выполнены в виде электромагнитов 23 и 24, установленн с возможностью взаимодействий с толкателями 16 и 17 посредством якорей 25 и 26, а щток 4 снабжен магнитом 27, взаимодействующими с нормально замкнутыми герконами 28, расположенными вдоль направления движения штока.
31
в привдде на фиг. 2 управляющее устройство 12 муфты 14 также выполнено в виде электромагнита 23, взаимодействующего с толкателем 16 посредством якоря 25. Управляющее устройство 13 выполнено, в виде дополнительной заклинивающей муфты 29, кинематически связанной с толкателем 1 7 тягой 30 и пружиной 31 и установленной на рейке 5 с возможностью взаимодействия с муфтой. 15 посредством упоров 32. Муфта 29 имеет заклинивающие элементы 33, а упоры 32 взаимодействуют с ограничителем 34.
Тяга 30 через трос 35 и барабан 36 связана с пружиной 37.
Толкатели 16 и 17 могут иметь подвижную часть 38, поджатую пружиной 39.
В дилиндре 2 выполнены рабочие полости 40 и 41.
Привод исполнительного механизма, изображенный на фиг.1, работает следующим образом.
В исходном положении рейка 5 заклинена муфтой 15, шток 2 демпфера 20 находится в крайнем положении. Электромагниты 23 и 24 выключены, толкатели 16 и 17 находятся в правом крайнем положении: толкатель 17 упирается в элементы 19, а толкатель 16 через якорь 25 упирается в электромагнит 23. Сначала сжатый воздух подключается к правой полости 41 цилиндра 2, но электромагнит 23 не включается. Шток 4 и рейка 5 смещаются влево. Шток 21 демпфера 20 под действием пружины 22 также смещается влево и толкает муфту 15. После некоторого перемещения упор 7 достигает ограничителя 10, но рейка 5 с толкателями 16 и 17 продолжает перемещаться. Поэтому элементы 19 освобождаются, т.е. муфта 15 расклинивает рейку 5. В дальнейшем толкатель 17 через якорь 26 упирается в электромагнит 24, а толкатель 16 встречается с элементами 18 и перемещает их влево. В результате этого муфта 14 заклинивает рейку 5, останавливая ее и шток 4. После останова штока 4 сжатый воздух подается в левую полость 40 цилиндра 2 и через соответствующий геркон 28 питание подводится к электромагниту 24. Шток 4 и рейка 5 перемещаются вправо. Так как электромагнит 24 через якорь 26 удерживает тсшкатель 17 на месте {он проскальзывает
относительно рейки 5, то муфта 15 не заклинивает рейку 5. При движении рейки 5 толкатель 16 также отходит вправо, элементы 18 освобождаются, 5 т.е. муфта 14 расклинивает рейку 5, При дальнейшем перемещении райки 5 толкатель 16 через якорь 25 упирается в электромагнит 23, после чего проскальзывает относительно рейки 5.
0 Магнит 27 перемещается вместе со штоком 4. При достижении магнитом 27 заданного геркона 28 питание электромагниту 24 прекращается, толкатель 17 смещается вправо, переме5 щая элементы 19. В результате муфта 15 заклинивает рейку 5.В дальнейшем рейка 5 перемещается вместе со штоком 21 демпфера 20. Когда поршень демпфера 20 упирается в крышку цилиндра этого
0 демпфера,рейка 5 вместе со штоком 4 останавливается. Заданное перемещение выполнено. Демпфер 20 в данном случае служит для смягчения удара в одном направлении. Длина хода
5 толкателей 16 и 17 должна быть несколько больше длины хода демпфера 20.
В описанном цикле действий шток 4 отводится влево для расклинивания муфты 15. Если же после перемещения штока 4 вправо надо переместить его в крайнее левое (исходноеJ положение, то при подаче сжатого воздуха в. правую полость 41 цилиндра 2 включается электромагнит 23, а
если необходимо шток 4 переместить влево до заданного положения, то электромагнит 23 включается через со ответствующий геркон 28.
Если первый вариант привода может обеспечить фиксированные положения штока 4 в любой последовательности 1т.е. при перемещении в прямом или обратном направлении, то вто рой вариант привода (фиг.2) предназначен для перемещения штока 4 на определенный шаг только в прямом направлении. В обратном направлении шток 4 отступает только для расклинивания муфты 15 или перемещается
до исходного положения.
В исходный момент времени сжатый воздух подведен к левой полости 40 цилиндра 2, рейка 5 заклинена муфтой 15, поршень демпфера 20 находит5 ся в правом крайнем положении, электромагнит 23 отключен, толкатель 16 находится в правом крайнем положении, корпус муфты 29 упирается в к пус муфты 15. Аналогично первому варианту сначала сжатый воздух под(ключается к правой полости 41 цилинд ра 2, но электромагнит 23 не включается. Шток 4 и рейка 5 перемещаются влево, а вместе с ними перемещаются муфты 15 и 29 (последняя под действием пружины 37 через барабан 36, трос 35 и тягу 30Y и шток 21 демпфе.ра 20. После некоторого перемещения упор 32 встречает ограничитель 34 и элементы 33 силой спиральной пружины 37 поджимаются к рейке 5 и поверх УСОСТИ корпуса муфты 29, однако рейка 5 не заклинивается, так как она продолжает перемещаться влево. При дальнейшем перемещении рейки 5 корпус муфты 15 достигает ограничителя 10 и расклинивает рейку 5, а толкатель 16 достигает элементы 18, перемещает их влево и муфта 14 заклинивает рейку 5. Движение рейки 5 и штока 4 прекращается. ПЬсле этого сжатый воздух подается в левую полость 40 цилиндра 2. Шток 4 и рейка 5 перемещаются вправо. При этом муфта 29 заклинивает рейку 5 и в дал нейшем перемещается вместе с рейкой перемещая тягу 30. Муфта 15 остается в расклиненном положении, так как подпружиненные элементы 19 находятся в крайнем левом положении. После некоторого перемещения штока 4 толкатель 17 упирается в элементы 19 и муфта 15 заклинивает рейку 5. После этого муфта 15 перемещается вместе с рейкой 5 и щтоком 21 демпфера 20. В момент заклинивания муфты 15 рейка 5 и тяга 30 резко тормозятся (вступает в действие демпфер 20), а корпус муфты 29 по инерции перемещается дальше, преодолевая силу пружины 31. Из-за перемещения муфты 29 относительно рейки 5 он расклинивается и под действием пружины 37 отводится влево до упора в корпус муфты 15. В дальнейшем обе муфты 15 и 29 перемещаются вместе. После достижения штоком 21 демпфера 20 крайнего положения рейка 5 и шток 4 останавливаются. Шаг вправо выполнен. Дпина шага регулируется расположением толкателя 17 на тяге 30. Если шток 4 необходимо вернуть в исходное положение, то при подводе сжатого воздуха в правую полость 41 цилиндра 2 включается электромагнит 23, который удерживает толкатель 16 и таким образом блокирует муфту 14. При гидравлическом исполнении привода действие его аналогично, однако отсутствует движение муфты 15. Технологические возможности первого варианта привода выше, но во втором варианте выше точность фиксированного положения благодаря жестким механичесКИМ связям между элементами привода. Второй вариант привода может быть использован в промьшшенномроботе, который осуществляет точечную сварку в точках, расположенных на одинаковых расстояниях. I / M 3if- 32 / AA 2 ,,2 29 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматические и пневмогидравлические приводы для систем числового программного управления технологическим оборудованием.- Обзор | |||
| ,Сер | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
