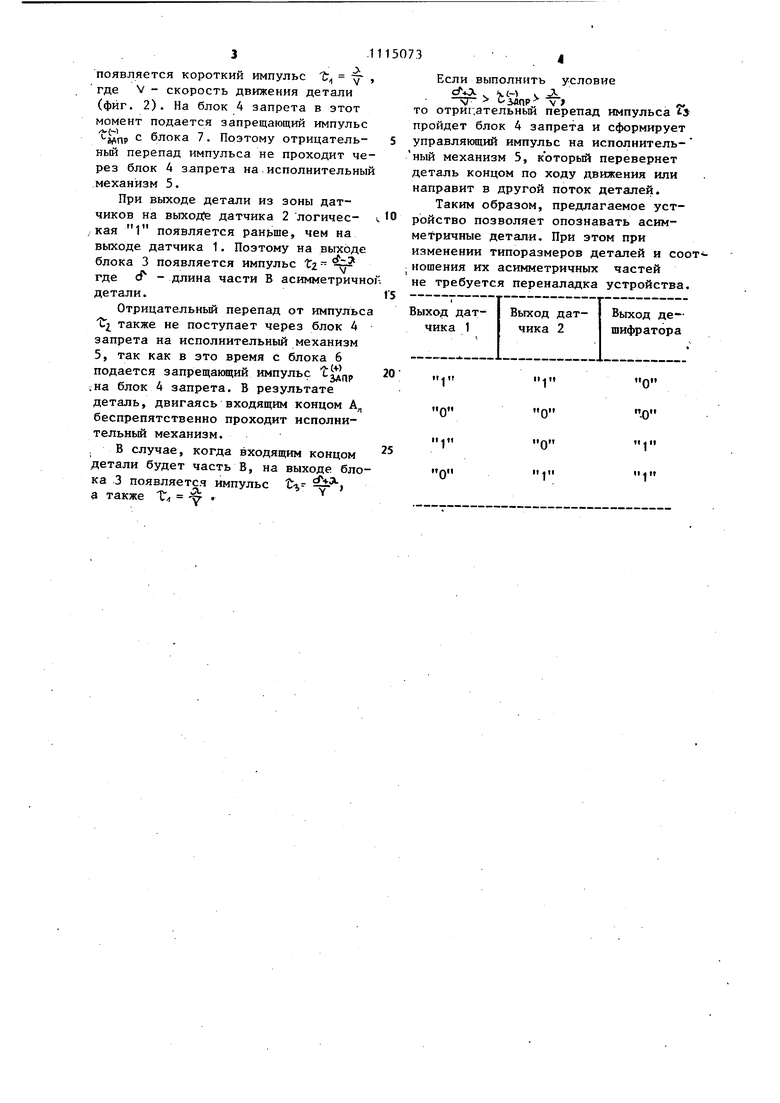
1 Изобретение относится к области автоматизации технологических процессов машиностроения, в частности к устройствам для электромагнитного распознавания деталей, и может быть использовано для рассортировки, раз браковки и переориентации деталей. Известно устройство для электромагнитного опознавания и ориентирования токопроводящих немагнитных деталей с асимметрией на концах, содержащее электромагнит и лоток Lll Недостаток этого устройства в том, что оно не может быть использовано для опознавания ферромагнитных деталей, а также при застопоривании деталей в зоне ориентации неизбежен существенный разогрев последних. Известно также устройство к дефектоскопам для блокировки краев .изделия, содержащее индуктивные датчики, блок преобразования сигнала датчика, связанный с ним блок запрета и исполнительный механизм С2 Однако данное устройство не -может быть использовано для опознаван ассиметричных по концам деталей, так как на выходе схемы запрета появляется сигнал независимо от того, каким концом движется асимметричная деталь. Целью изобретения является расши рение области применения устройства путем обеспечения распознавания асим метричных по концам деталей без пер наладки устройства при изменении типоразмеров деталей и соотношения их асимметричных частей. Поставленная цель достигается тем, что устройство для распознавания асимметричных деталей из магнит ного материала, содержащее транспортный механизм, магнитные датчики и последовательно соединенные де шифратор, блок запрета и исполнител ный механизм, снабжено одновибраторами, входы которых подключены к вы ходам магнитных датчиков, соединенных с входами дешифратора, выходы одновибраторов подключены к соответствующим входам блока запрета, причем магнитные датчики расположен в одной плоскости с рабочей поверхностью механизма транспортировки, выполнены с разной чувствительность к материалу деталей и содержат гене раторы и катушки индуктивности, вкл ченные в задающие цепи генераторов. .32 На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг. 2 диаграммы сигналов на эле.ментах устройства при перемещении детали относительно.датчика одним из концов; на фиг. 3 - диаграммы сигналов при перемещении детали другим концом относительно датчика. Устройство для распознавания асимметричных деталей из магнитного материала состоит из магнитных датчиков 1 и 2, соединенного с ними дешифратора 3 сигналов датчиков и последовательно соединенных с ним блока 4 запрета и исполнительного механизма 5. Выходы магнитных датчиков 1 и 2 соединены соответственно с входами одновибраторов 6 и 7, выходы которых соединены соответственно с входами блока 4 запрета. Один из датчиков, например датчик 1, выполнен с высокой чувствительностью к материалу детали 8, а датчик 2-е низкой чувствительностьк). Датчики 1 и 2 расположены в одной плоскости. Устройство содержит транспортный механизм 9, выполненньй в виде гравитационного лотка. Датчики 1 и 2 содержат генераторы 10 и 11 и катушки 12 и 13 индуктивности, включенные в задающие цепи генераторов 10 и 11. Устройство работает следующим образом. При перемещении асимметричных деталей разными концами относительно датчиков 1 и 2 возникают различные сочетания моментов срабатывания датчиков. Это объясняется тем, что датчик 1J обладающий более высокой чувствительностью, реагирует на деталь по всей длине, а датчик 2 обладающий низкой чувствительностью реагирует только на часть детали. При отсутствии детали на выходе датчиков 1 и 2 будут сигналы логической 1. Рассмотрим случай, KOI- да входящий конец детали - часть А (фиг. 2). На эту часть детали реагируют оба датчика 1 и 2. Блок 3 преобразования сигналов датчиков реализует функцию, приведенную в таблице. Пусть расстояние, которое долж на пройти деталь концом А (фиг. 1) от момента срабатьтания одного датчика до момента срабатывания другого датчика. Тогда на выходе блока 3
появляется короткий импульс t у- , где V - скорость движения детали (фиг. 2). На блок 4 запрета в этот момент подается запрещающий импульс АПР блока 7. Поэтому отрицательный перепад импульса не проходит через блок 4 запрета на.исполнительный механизм 5.
При выходе детали из зоны датчиков на выхо;Се датчика 2 логичес- i. кая 1 появляется раньше, чем на выходе датчика 1. Поэтому на выходе блока 3 появляется импульс tz где сГ - длина части В асимметричной детали.
Отрицательный перепад от импульса t также не поступает через блок 4 запрета на исполнительный механизм 5, так как в это время с блока 6 подается запрещакиций импульс ,p на блок 4 запрета. В результате деталь, двигаясь входящим концом А беспрепятственно проходит исполнительный механизм.
В случае, когда входящим концом етали будет часть В, на выходе блока 3 появляется импульс t-i,- t также Г - .
Если выполнить условие
ЬЗДПР
то отриг;ательныи перепад импульса ь
пройдет блок 4 запрета и сформирует управляющий импульс на исполнительный механизм 5, который перевернет деталь концом по ходу движения или направит в другой поток деталей.
Таким образом, предлагаемое устройство позволяет опознавать асимметричные детали. При этом при изменении типоразмеров деталей и соо ношения их асимметричных частей не требуется переналадка устройства.
движение концо В.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления процессом разбраковки и ориентации деталей | 1988 |
|
SU1639784A1 |
| Устройство для сортировки деталей на конвейере по типоразмеру | 1985 |
|
SU1319932A1 |
| Устройство для контроля и сортировки деталей | 1987 |
|
SU1442274A1 |
| Устройство для управления сортировкой деталей по типоразмеру | 1985 |
|
SU1271589A2 |
| Автомат для контроля и сортировки деталей и устройство управления автоматом для контроля и сортировки деталей | 1983 |
|
SU1135500A1 |
| Устройство для опознавания рельсовых транспортных средств | 1989 |
|
SU1654088A1 |
| Устройство для счета предметов, перемещаемых конвейером | 1979 |
|
SU781854A1 |
| Способ А.Н.Алексеева для управления подачей воды в промывные ванны гальванических линий и устройство для его осуществления | 1987 |
|
SU1504294A1 |
| Устройство для сортировки плоских деталей | 1985 |
|
SU1291218A1 |
| СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛИТЕЛЬНОСТЬЮ ТЕХНОЛОГИЧЕСКИХ ОПЕРАЦИЙ НА ЛИНИИ СТАЦИОНАРНЫХ ГАЛЬВАНИЧЕСКИХ ВАНН | 1987 |
|
RU1491053C |
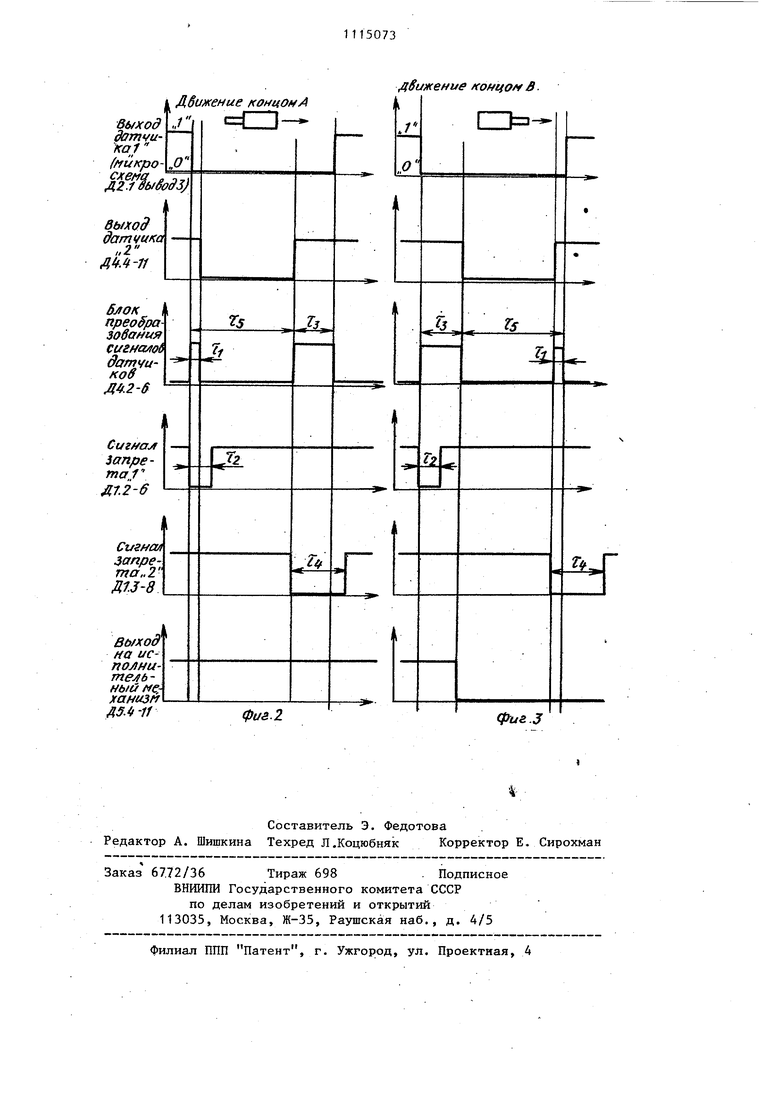
УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ АСИММЕТРИЧНЫХ ДЕТАЛЕЙ ИЗ МАГНИТНОГО МАТЕРИАЛА, содержащее транспортный механизм, магнитные датчики и последовательно соединенные дешифратор, блок запрета и исполнительный механизм, отличающееся тем, что, с целью расширения области его применения путем обеспечения распознавания асимметричных детал.ей при изменении их типоразмеров без переналадки устройства, оно содержит одновибраторы, входы которых подключены к выходам магнитных датчиков, соединенных с входами дешифратора, выходы одновибраторов подключены к соответствующим входам блока , запрета, причем магнитные датчики расположены в одной плоскости с рабочей поверхностью механизма транспортировки, выполнены с разной чувствительностью к материалу деталей и содержат генераторы и катушки индуктивности, включенные в задающие цепи генераторов. СП о Од
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Иоффе Б.А | |||
| и Калнинь Р.К | |||
| Ориентирование деталей электромагнитным полем | |||
| Киев, Зинатне, 1972, с | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство к дефектоскопам для блокировки краев изделия | 1973 |
|
SU481828A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
