112
Изобретение относится к автоматизации технологических процессов и может быть использовано для сорти- ровки деталей сложной формы с общим характерным признаком и для выдачи их в заданном положении.
Цель изобретения - повьшение эффективности сортировки путем осуществления контроля формы и размеров сортируемых деталей.
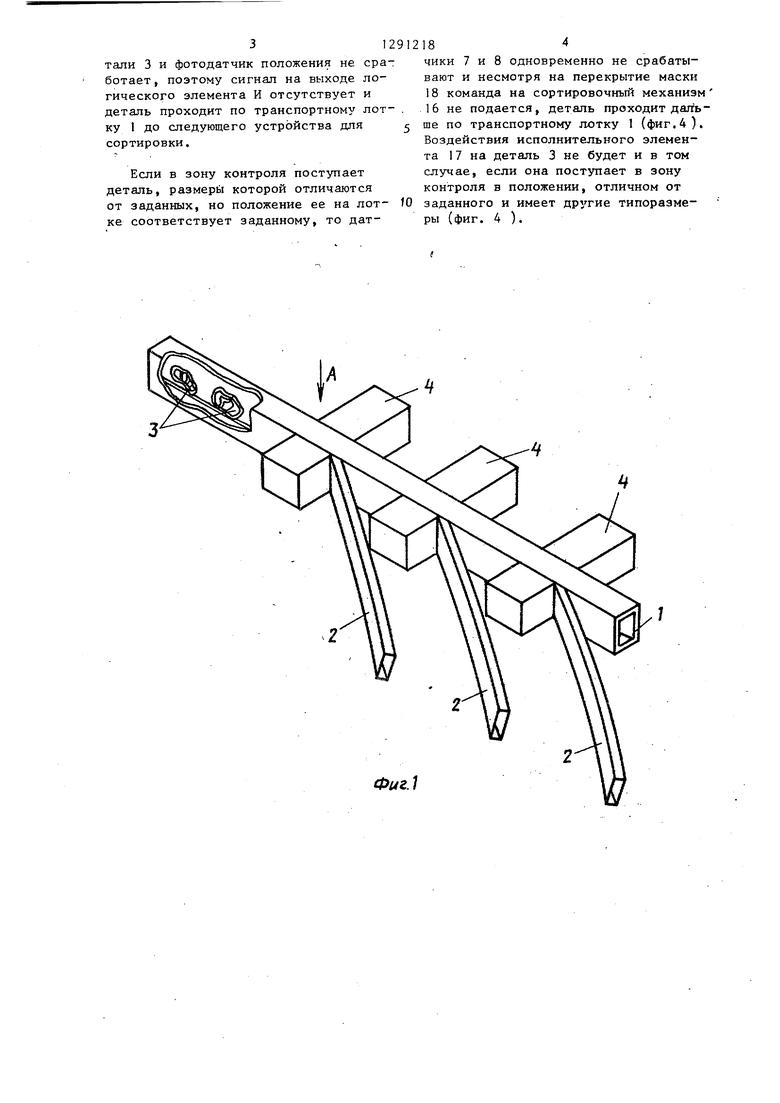
На фиг, 1 показано расположение нескольких однотипных устройств сортировки с их системами управления распознаванием и сортировкой на общем транспортном лотке; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг, 2; на фиг. 4 - положения сортируемых деталей на транспортном лотке в зоне контроля; на фиг, 5 структурная схема системы управления распознаванием и сортировкой.
Относительно общего транспортного лотка 1 размещаются отводные лотки 2 число которых определяется количест- вом групп сортируемых деталей 3, однотипные сортировочные механизмы и одинаковые по структуре системы 4 управления распознаванием и сортировкой.
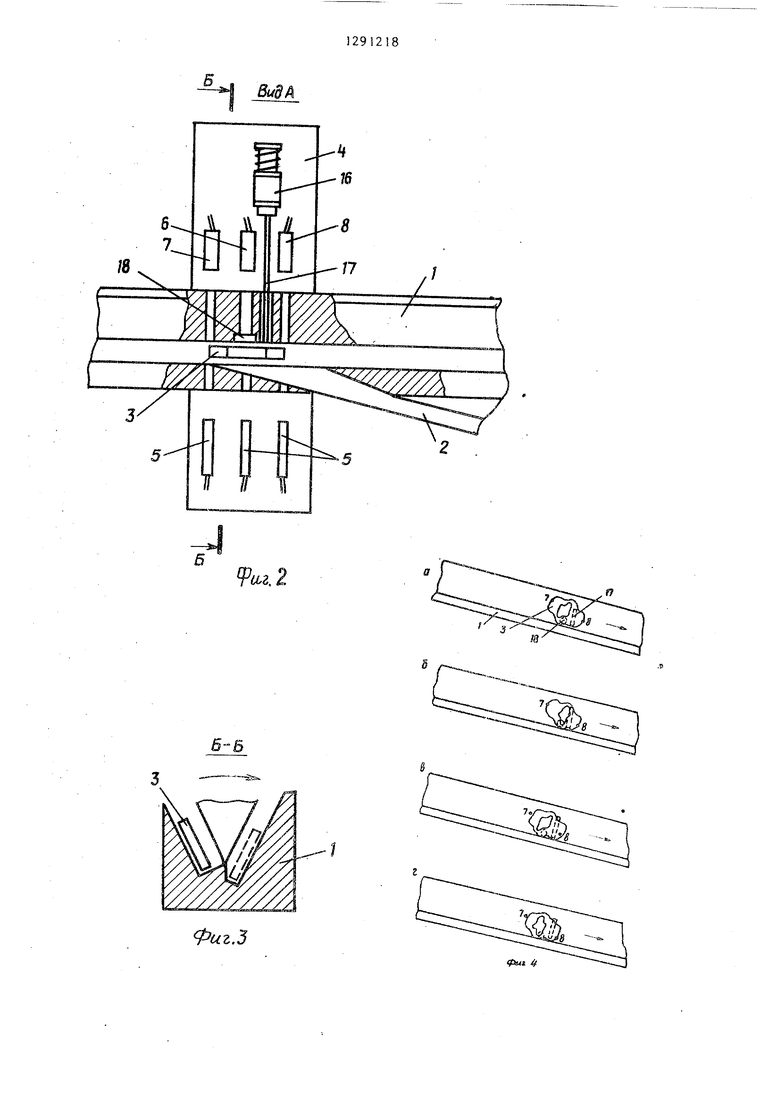
Система 4 управления распознава- чнием и сортировкой деталей каждого устройства для сортировки (фиг, 2-5) содержит источник 5 излучения (их число определяется числом чувствительных элементов, работающих на фо- тоэлектрическом методе контроля), фоточувствительный элемент (фотодатчик положения) 6 для измерительных преобразователей (датчика группы) 7 и 8, фop иpoвaтeли 9-11 сигнала для каждого датчика, формирователь 12 импульса селекции, логический элемент И 13, формирователь 14 команды и усилитель 15,
Сортировочный механизм 16 установ- лен на транспортном лотке перпендикулярно направлению движения деталей и имеет исполнительный элемент 17, выходящий через гнездо в стенке лотка в зоне контроля.
Прорезь-маска 18 выполнена в стен- ке лотка 1 и расположена между источ НИКОМ 5, излучения и фоточувствительным элементом 6.
Фоточувствительными элементами указанной системы управления.являют ся фотодатчик 6 положения и два измерительных преобразователя (датчики группы) 7 и 8. В качестве источника
0
0 5 0
5 Q
182
излучения используется, например, инфракрасный излучатель, в качестве фоточувствите-пьного элемента - фотодиод, подключенный к входу операционного усилителя. Датчик положения предназначен для регистрации нужного положения детали 3 на лотке при перекрытии маски 18 характерным признаком детали. Датчики групп - измерительные преобразователи 7 и 8 являются дополнительными датчиками и предназначены для фиксации принадлежности детали к той или иной группе (типоразмеру) в зависимости от отличительных ее признаков и могут быть индуктивными, фотоэлектрическими или другими. В конкретном случае реализации использованы также фотодатчики как обладающие наиболее высокой точностью опредепения смещения детали. Логический элемент И 13 предназначен для момента одновременного при хода сигналов от всех трех датчиков и выполнен на базе микросхемы. В качестве формирователя 14 команды использован одновибратор с регулируемой длительностью импульса. Формиро - ватель 12 имщшьса селекции построен как формирователь интервалов времени и выпoлkeн на микросхеме.
Устройство работает следующим образом.
При прохождении через зону контроля годной (фиг, 4 ), т.е. находящейся в заданном положении и имеющей заданьгые размеры; датчики 7 и 8 срабатывают и через формирователь 10 и 1 выдают сигнал на первый и второй входы логического элемента И 13. В момент перекрытия маски 18 характерным.признаком детали 3 формирователь 12 импульса селекции выдает короткий импульс на третий вход логического элемента И 13, на выходе которого появляется сигнал, запускающий формирователь 14 команды, подаваемый на сортировочный механизм 16 (его электромагнитный привод), что приводит к перемещению исполнительного элемента 17 по направлению к детали 3 и она выталкивается в отводной лоток 2,
Если в зону контроля поступает негодная деталь (фиг. 3,, т.е. нужного размера5 но не в заданном положении на лотке, то срабатывают дат чики 7 и 8, однако маска 18 не будет перекрыта характерным признаком да312912
тали 3 и фотодатчик положения не сработает , поэтому сигнал на выходе логического элемента И отсутствует и деталь проходит по транспортному лот- . ку 1 до следующего устройства для 5 сортировки.
Если в зону контроля поступает деталь, размерй которой отличаются от заданных, но положение ее на лот- fO ке соответствует заданному, то дат184
чики 7 и 8 одновременно не срабатывают и несмотря на перекрытие маски 18 команда на сортировочный механизм 16 не подается, деталь проходит дальше по транспортному лотку 1 (фиг.4). Воздействия исполнительного элемента 17 на деталь 3 не будет и в том случае, если она поступает в зону контроля в положении, отличном от заданного и имеет другие типоразмеры (фиг. 4 ).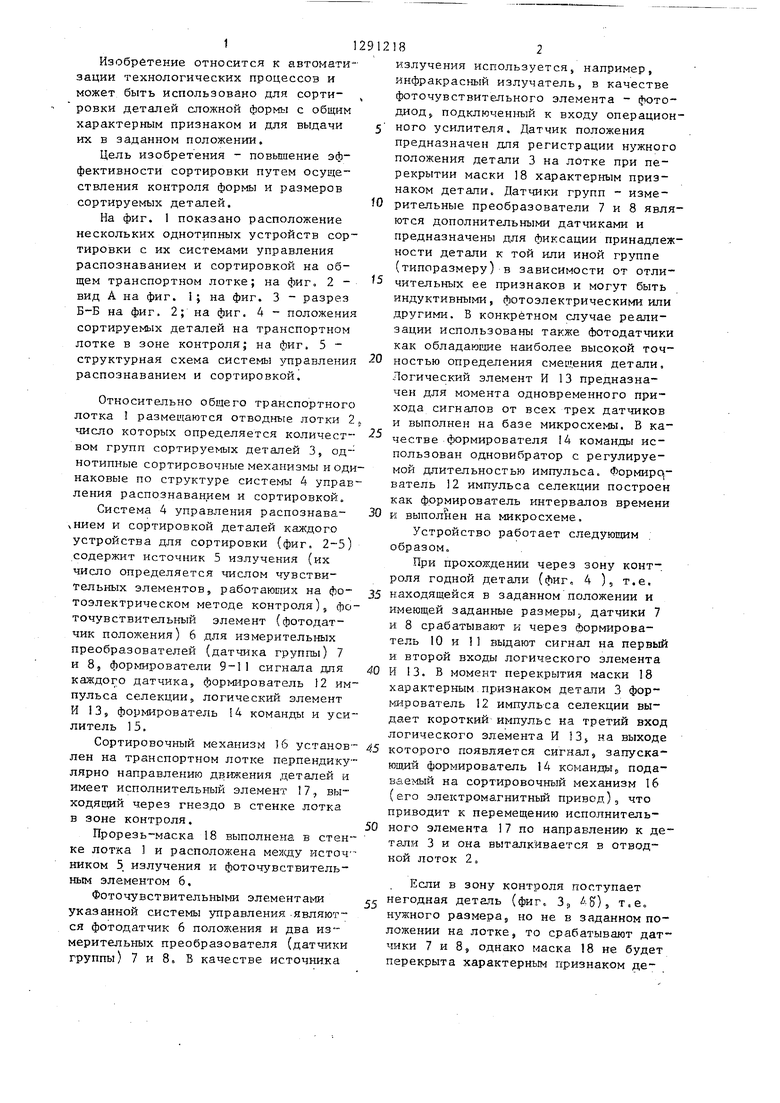
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки плоских деталей | 1986 |
|
SU1407595A1 |
| Автомат для контроля и разбраковки деталей | 1987 |
|
SU1470363A1 |
| Автомат для контроля и сортировки деталей | 1986 |
|
SU1377160A1 |
| Устройство управления сортировкой деталей | 1986 |
|
SU1391737A1 |
| Автомат для контроля и сортировки тел вращения | 1977 |
|
SU716641A1 |
| Устройство для ориентации асимметричных токопроводящих деталей | 1983 |
|
SU1123838A1 |
| Устройство для контроля и сортировки деталей | 1987 |
|
SU1442274A1 |
| Автомат для контроля и сортировки деталей и устройство управления автоматом для контроля и сортировки деталей | 1983 |
|
SU1135500A1 |
| Автоматизированная сортировочная установка для разбраковки сварочных электродов | 1990 |
|
SU1780865A1 |
| Автомат для контроля деталей преимущественно типа колпачков | 1986 |
|
SU1416212A1 |
Фиг.
- jMA
I
а.г,2
6-5
фиг.З
f
рм if
g h,
Г Г1-Г1П
/5
-
E
. 5
Редактор H. Тупица
Составитель Т, Тихонравова Техред Л.Олейник
Заказ 68/10 Тираж 539
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
W
/J
-J
e
Корректор М. Пожо
Подписное
| Устройство для сортировки шайб | 1982 |
|
SU1076154A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
