сл
со
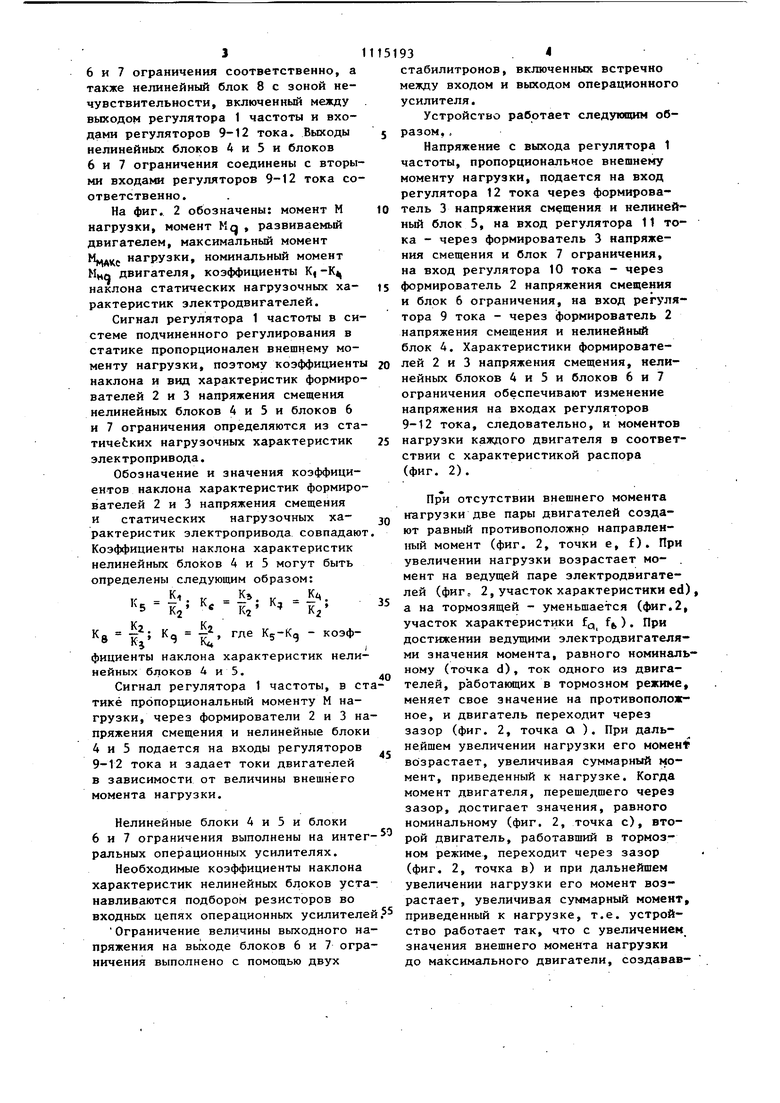
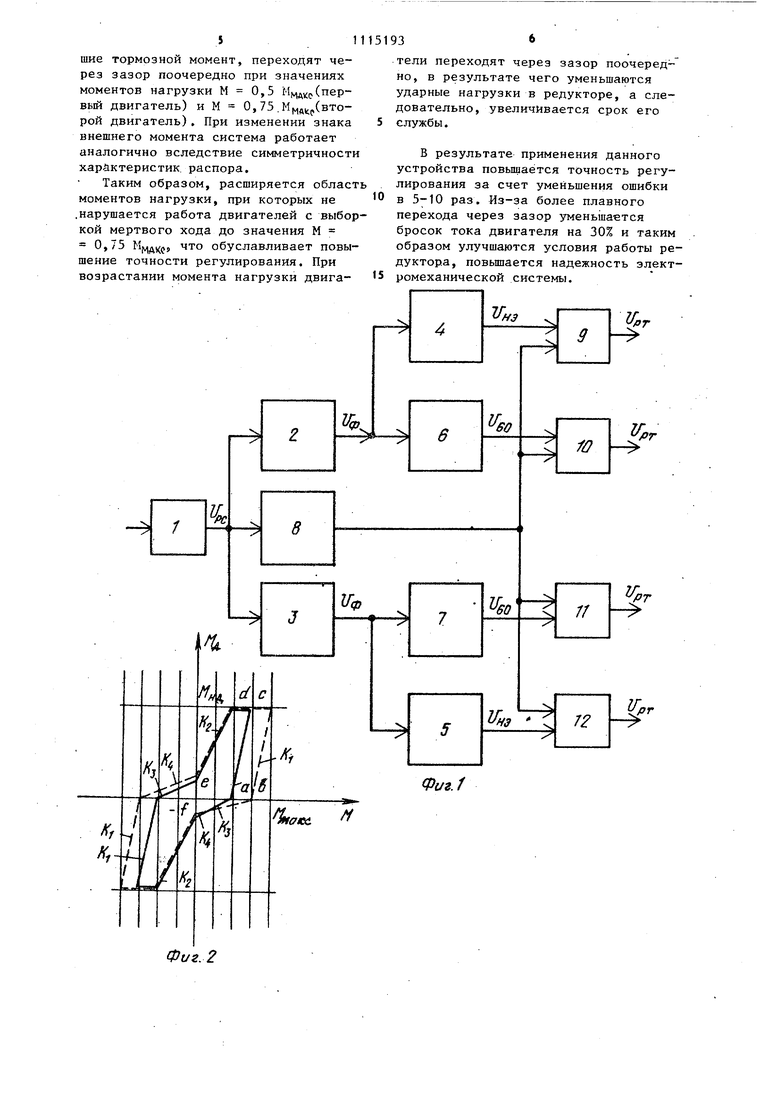
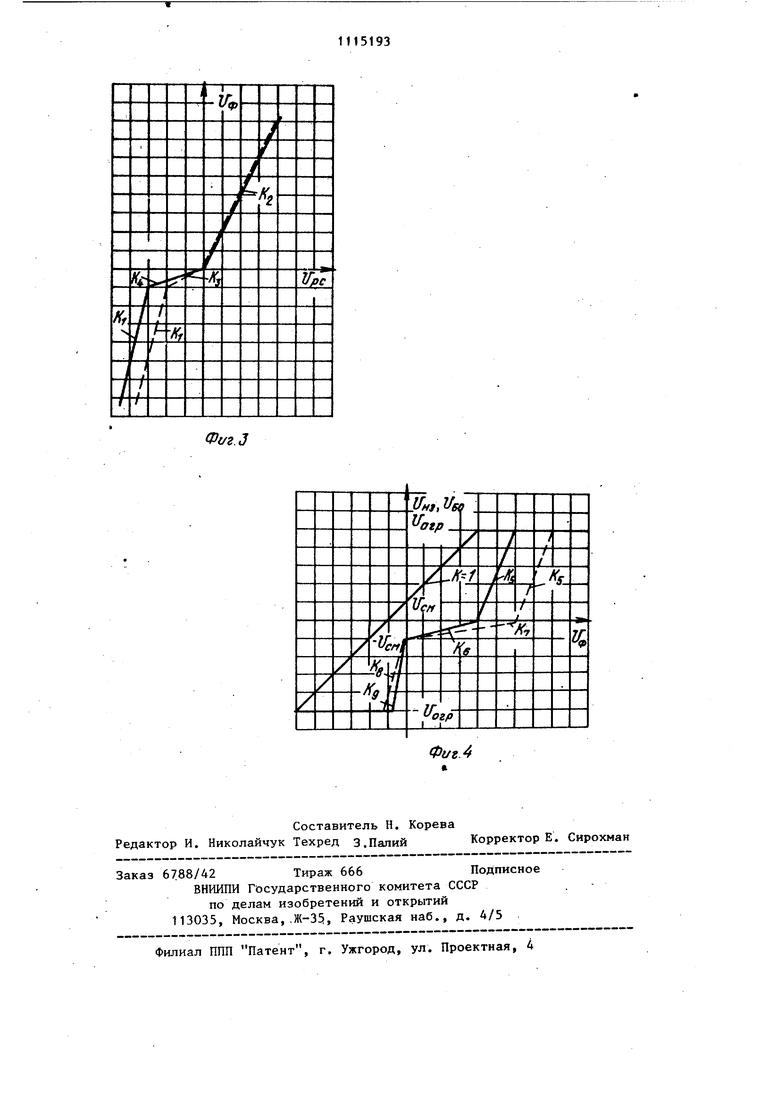
со Изобретение относится к электротехнике и может быть использовано в системах подчиненного регулирования, преимущественно для радиотелескопов, в которых на общий выходной вал механизма работают две группы двигателей с питанием их от индивидуальных тиристо1 нь1х преобразователей. Известно устройство для управления двумя группами электродвигателей, в котором на зубчатый венец главной оси механизма действуют две пары двигателей, причем одна пара вращает зубчатый венец, а другая - тормозит. При другом направлении вращения функции групп двигателей меняются, благодаря чему изменение направления вращения осуществляется без перехода через зазор С13. Недостатком этого устройства являются низкие энергетические показатели, обусловленные необходимостью преодолевания ведомыми электродвигателя ми момента сопротивления, создаваемого тормозными электродвигателями по всей зоне работы. Наиболее близким к изобретению по технической сущности является устройство для управления двумя группами электродвигателей, содержащее регулятор частоты, к выходу которого подключены формирователи напряжения смещения и нелинейный блок с зоной нечувствительности, и индивидуальные для каждого электродвигателя регу ляторы toKa, первые входы которых связаны с выходом нелинейного с зоной нечувствительности. При отсутствии управляющего сигнала обе группы электродвигателей создают равный, противоположно направленный момент. При увеличении сигнала управления возрастает момент на ведущей группе электродвигателей, а на тормозящей - уменьшается. При достижении моментом ведущей группы номинального значения ток тормозящей группы меняет знак, и при дальнейшем увеличении сигнала управления момент второй группы электродвигателей увеличивается, увеличивая суммарный момент, приведенный к нагрузке. Распределение напряжения регулятора частоты между регуляторами тока, обеспечивающее .нелинейное распределение нагрузки между группами электродвигателей, осуществляется с помощью формирователей напряжения смещения С 21, , Однако в известном устройстве обе группы двигателей работают с выборкой мертвого хода в зацеплении до значения моментов нагрузки на механизме:М 0,5-bWKc, . где М - внешний момент нагрузки, приложенный к механизму; WKC максимальное значение внешнего момента нагрузки. Когда момент нагрузки достигнет значения М 0,5 ИМАКС ток тормозящей группы электродвигателей меняет знак, и они переходят через зазор, что сопровождается ударными нагрузками в редукторе. При значении момента нагрузки М 0,5 обе группы работают в двигательном режиме, при этом режим работы с. выборкой мертвого хода нарушается, что снижает точность управления. Целью изобретения является повышение точности управления и снижение ударных нагрузок. Поставленная цель достигается тем, что в устройство для управления двумя группами электродвигателей, содержащее регулятор частоты, к выходу которого подключены формирователи напряжения смещения и нелинейный блок с зоной нечувствительности, и индивидуальные для каждого электродвигателя регуляторы тока, первые входы которых связаны с вькодом нелинейного блока с зоной нечувствительности, введены блоки ограничения и нелинейные блоки по числу групп электродвигателей, причем к выходу каждого формирователя напряжения смещения подключены входы блока ограничения и нелинейного блока, выходы которых соединены с вторыми входами соответствующих регуляторов тока. I На фиг. 1 представлена блок-схема устройства (для случая четьфех электродвигателей) ; на фиг. 2 - вид статических нагрузочных характеристик электропривода, обеспечивакицих работу двигателей в распор; на фиг. 3 - вид характеристик формирователей напряжения смещения; на фиг. 4 - вид характеристик нелинейных блоков и блоков ограничения. Устройство содержит регулятор 1 частоты, соединенный через формирователи 2 и 3 напряжения смещения с входами нелинейных блоков 4 и 5 и блоков 3 6 и 7 ограничения соответственно, а также нелинейный блок 8 с зоной нечувствительности, включенный между выходом регулятора 1 частоты и входами регуляторов 9-12 тока. Выходы нелинейных блоков А и 5 и блоков 6 и 7 ограничения соединены с вторы ми входами регуляторов 9-12 тока со ответственно. На фиг.. 2 обозначены: момент М нагрузки, момент Kq , развиваемый двигателем, максимальный момент Ммд,; нагрузки, номинальный момент MHO двигателя, коэффициенты KI-Ki, наклона статических нагрузочных характеристик злектродвигателей. Сигнал регулятора 1 частоты в си стеме подчиненного регулирования в статике пропорционален внешнему моменту нагрузки, поэтому коэффициент наклона и вид характеристик формиро вателей 2 и 3 напряжения смещения нелинейных блоков 4 и 5 и блоков 6 и 7 ограничения определяются из ста тичеЬких нагрузочных характеристик электропривода. Обозначение и значения коэффициентов наклона характеристик формиро вателей 2 и 3 напряжения смещения и статических нагрузочных характеристик электропривода совпадаю Коэффициенты наклона характеристик нелинейных блоков 4 и 5 могут быть определены следующим образом: Y - 1 . V к . к- - . 2 К К - г. к - Аг , где Kj-Kg - коэфKS - к к фициенты наклона характеристик нели нейных блоков 4 и 5. Сигнал регулятора 1 частоты, в с тике пропорциональный моменту М нагрузки, через формирователи 2 и 3 н пряжения смещения и нелинейные блок 4 и 5 подается на входы регуляторов 9-12 тока и задает токи двигателей в зависимости от величины внешнего момента нагрузки. Нелинейные блоки 4 и 5 и блоки 6 и 7 ограничения выполнены на инте ральных операционных усилителях. Необходимые коэффициенты наклона характеристик нелинейных блоков уст навливаются подбором резисторов во входных цепях операционных усилител Ограничение величины выходного н пряжения на вькоде блоков 6 и 7 огр ничения выполнено с помощью двух 93.4 стабилитронов, включенных встречно между входом и выходом операционного усилителя. Устройство работает следующим образом, Напряжение с выхода регулятора 1 частоты, пропорциональное внешнему моменту нагрузки, подается на вход регулятора 12 тока через формирователь 3 напряжения смещения и нелинейный блок 5, на вход регулятора 11 тока - через формирователь 3 напряжения смещения и блок 7 ограничения, на вход регулятора 10 тока - через формирователь 2 напряжения смещения и блок 6 ограничения, на вход регулятора 9 тока - через формирователь 2 напряжения смещения и нелинейный блок 4. Характеристики формирователей 2 и 3 напряжения смещения, нелинейных блоков 4 и 5 и блоков 6 и 7 ограничения обеспечивают изменение напряжения на входах регуляторов 9-12 тока, следовательно, и моментов нагрузки каждого двигателя в соответствии с характеристикой распора (фиг. 2). При отсутствии внешнего момента нвгрузки две пары двигателей создают равный противоположно направленный момент (фиг. 2, точки е, f). При увеличении нагрузки возрастает мо- . мент на ведущей паре электродвигателей (фиг, 2, участок характеристики её), а на тормозящей - уменьшается (фиг.2, участок характеристики д f). При достижении ведущими электродвигателями значения момента, равного номинальному (точка d), ток одного из двигателей, работающих в тормозном режиме, меняет свое значение на противоположное, и двигатель переходит через зазор (фиг. 2, точка Q ). При дальнейшем увеличении нагрузки его момен1г возрастает, увеличивая суммарный момент, приведенный к нагрузке. Когда момент двигателя, перешедшего через зазор, достигает значения, равного номинальному (фиг. 2, точка с), второй двигатель, работавший в тормозном режиме, переходит через зазор (фиг. 2, точка в) и при дальнейшем увеличении нагрузки его момент возрастает, увеличивая суммарный момент, приведенный к нагрузке, т.е. устройство работает так, что с увеличением значения внешнего момента нагрузки до максимального двигатели, создавав- i шие тормозной момент, переходят через зазор поочередно при значениях моментов нагрузки М 0,5 М у Спервый двигатель) и М 0,75 .,(BToрой двигатель), При изменении знака внешнего момента система работает аналогично вследствие симметричност характеристик, распора. Таким образом, расширяется облас моментов нагрузки, при которых не .нарушается работа двигателей с выбо кой мертвого хода до значения М 0,75 Ммд)(;9 что обуславливает повы шение точности регулирования. При возрастании момента нагрузки двига3тели переходят через зазор поочередно, в результате чего уменьшаются ударные нагрузки в редукторе, а следовательно, увеличивается срок его службы. В результате применения данного устройства повышается точность регулирования за счет уменьшения ошибки в 5-10 раз. Из-за более плавного перехода через зазор уменьшается бросок тока двигателя на 30% и таким образом улучшаются условия работы редуктора, повьш1ается надежность электромеханической системы.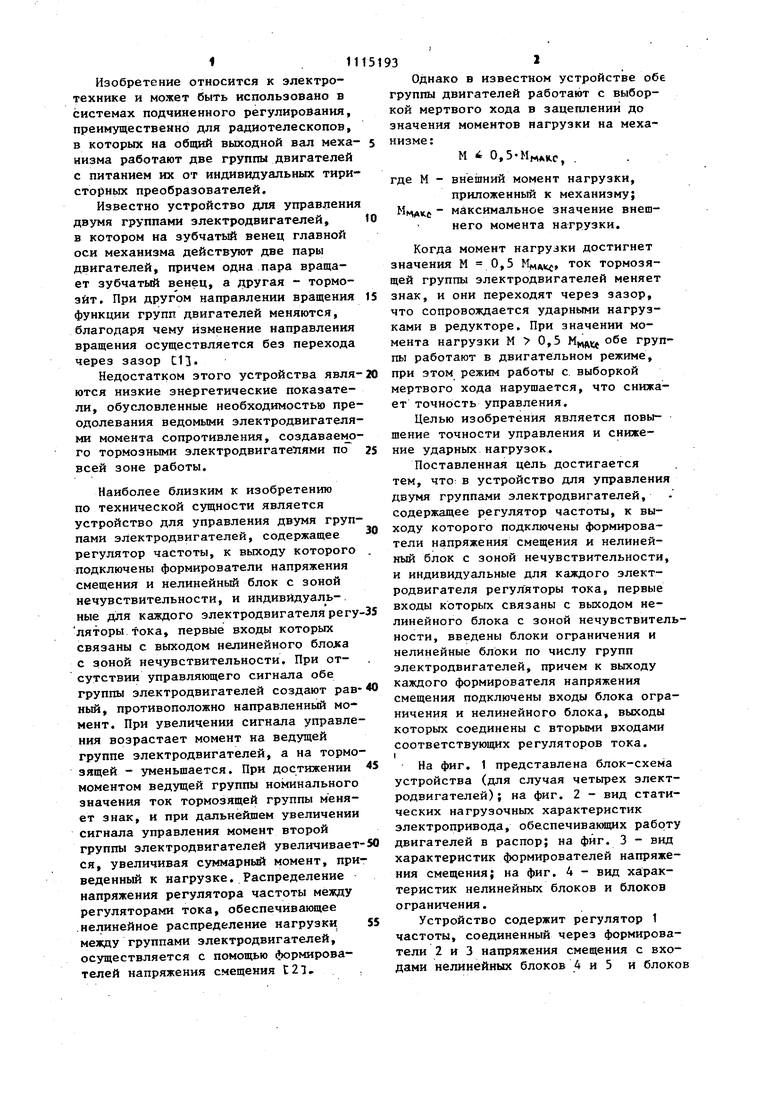
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двухдвигательным электроприводом | 1981 |
|
SU982172A1 |
| Устройство для управления двухдвигательным электроприводом | 1978 |
|
SU864477A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| Многодвигательный электропривод | 1985 |
|
SU1348979A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| Электропривод с ограничением динамических усилий в механизмах экскаватора | 1987 |
|
SU1582314A1 |
| Устройство для управления двухдвигательным электроприводом | 1983 |
|
SU1138915A1 |
| Реверсивный тиристорный электроприводпОСТОяННОгО TOKA | 1979 |
|
SU824393A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУМЯ ГРУППАМИ ЭЛЕКТРОДВИГАТЕЛЕЙ, содержащее регулятор частоты, к выходу которого подключены формирователи напряжения смещения и нелинейный блок с зоной нечувствительности, и индивидуальные для каждого электродвигателя регуляторы тика, первые входы которых связаны с выходом нелинейного блока с зоной нечувствительнЪсти, о тличающее ся тем, что, с целью повышения точности управления и снижения ударных нагрузок, в него введены блоки ограничения и нелинейные блоки по числу групп электродвигателей, причем к вькоду каждого формирователя .напряжения смещения подключены входы, нелинейного блока и блока ограничения, выходы которых соединены с вторыми входами соответствующих . Л регуляторов тока.
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Von Edgar Bohm Fiihrung.und Regelung ftir Boderstationeh.- Siemens Zeitschsift, 1974, 48,Helf 11 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления двухдвигательным электроприводом | 1981 |
|
SU982172A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
