(54) УСТЮЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двухдвигательным электроприводом | 1978 |
|
SU864477A1 |
| Устройство для управления двумя группами электродвигателей | 1983 |
|
SU1115193A1 |
| Устройство для управления двухдвигательным электроприводом | 1977 |
|
SU678621A1 |
| Устройство для управления двухдвигательным электроприводом | 1988 |
|
SU1577054A1 |
| Устройство для управления двухдвигательным электроприводом | 1983 |
|
SU1138915A1 |
| Устройство для управления электроприводом | 1984 |
|
SU1241395A1 |
| Двухдвигательный электропривод постоянного тока | 1982 |
|
SU1075360A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
1
Изобретение относится к электротехнике и может быть использовано в устройствах управления электроприводом в системах подчиненного регулирования, преимущественно , для радиотелескопов, в которых на общий выходной вал механизма работают два или больше число электродвигателей с питанием от индивидуальных тиристорных преобразователей.
Известны электроприводы, в которых управ-... ленке моментами двигателей осуществляется с помощью усилителей-формирователей, обеспечивающих работу электродвигателей в рас-; пор. Сигнал регулятора скорости в системе подчиненного регулирования, в статике пропор-., циональный внешнему моменту нагрузки, распреде|1яется этими формирователями между регуляторами тока каждого электродвигателя в определенном соотнощешга, обеспечивающем начальные моменты распора двигателей одши- JQ ковой величины и противоположных знаков. Для. умеиьшения установленной мощности электродвигателей характеристику распора строят таким образом, что при достижении
моментом нагрузки значения, равного поло- вине максимально возможного ток (момент) ведущего двигателя ограничивается номинальным значением, а. ток второго (тормозного) даигателя меняет знак, и при дальнейшем увеличении момента нагрузки до максимального приводы работают параллельно, создавая каждый номинальный момент 1.
Наиболее близким техническим решением является устройство для управления двухдвигательным электроприводом, содержащее общий регулятор скорости; индивидуальные для каждого электродвигателя регуляторы тока и формирователь напряжения смещения 2.
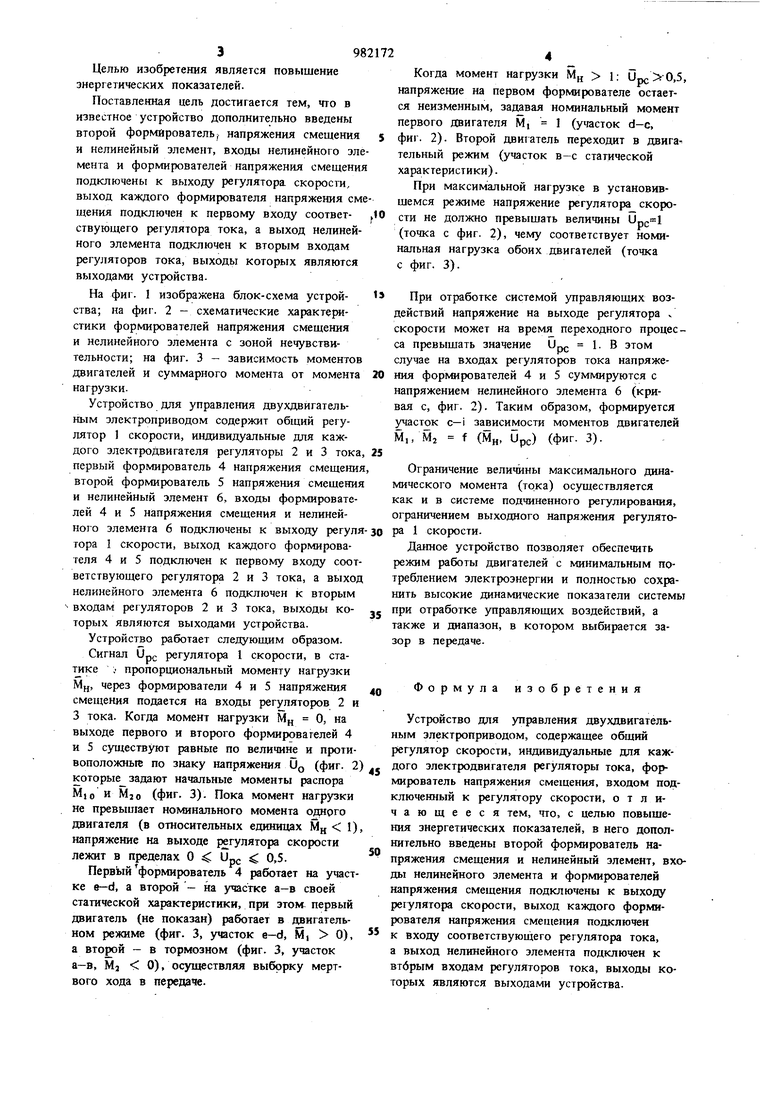
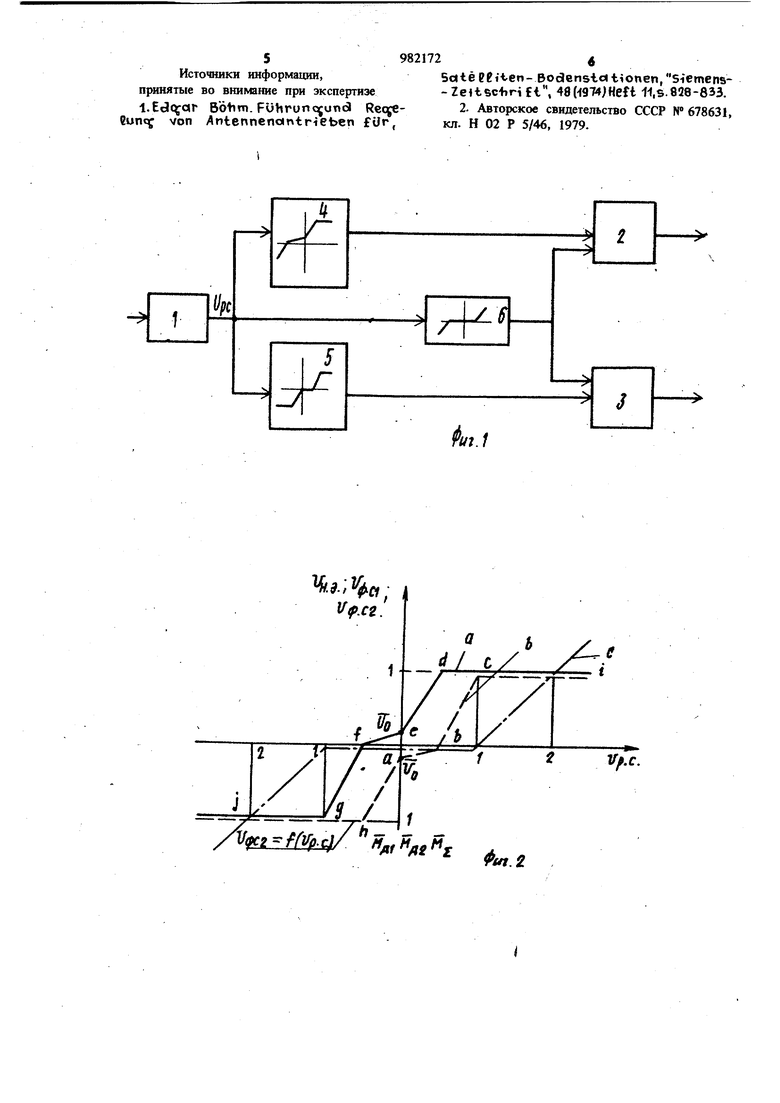
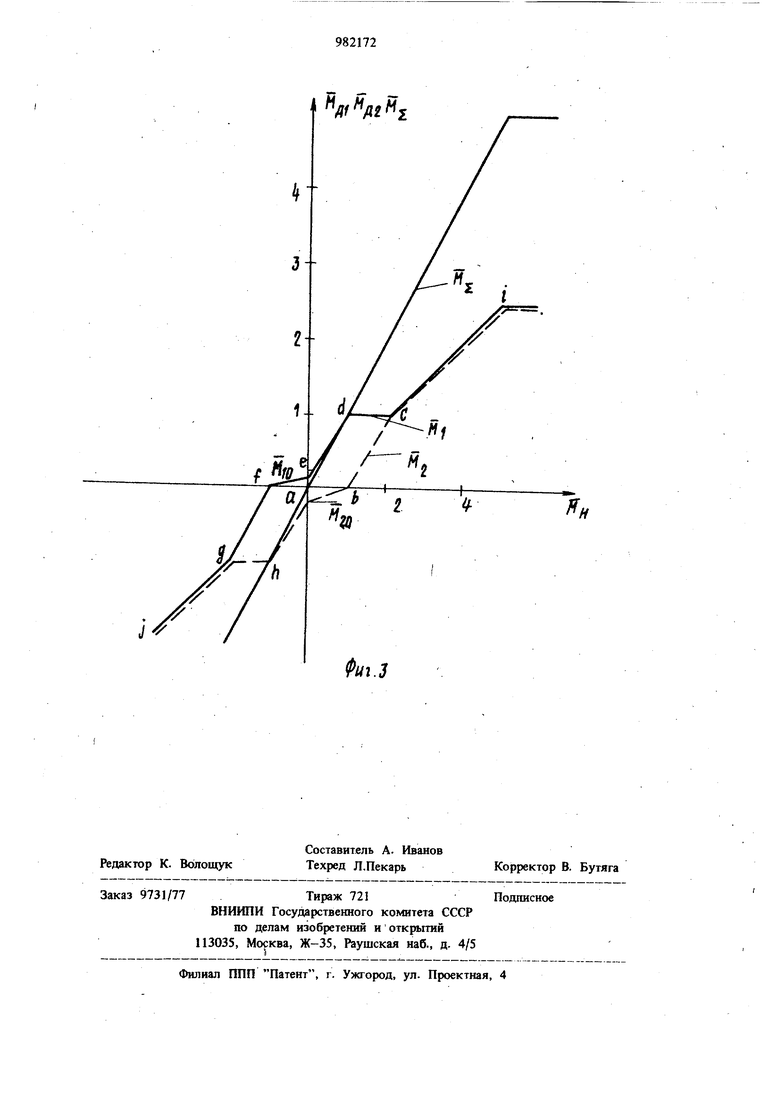
Однако используемый в этом устройстве принцип распределения моментов между электродвигателями не позволяет получить начальный ток распора двигателей меньще половины номинального (уменьшение тока распора вызывает сужение даапазона внешних моментов, при котором осуществляется выборка зазора), что обуславливает низкие энергетические показатели схемы. 398 Целью изобретения является повышение энергетических показателей. Поставленная цель достигается тем, что в известное устройство дополнительно введены второй формирователь напряжения смещения и нелинейный элемент, входы нелинейного эле мента и формирователей напряжения смещения подключены к выходу регулятора скорости, выход каждого формирователя напряжения сме щения подключен к первому входу соответствующего регулятора тока, а выход нелинейного элемента подключен к вторым входам регуляторов тока, выходы которых являются выходами устройства. На фиг. 1 изображена блок-схема устройства; на фиг. 2 - схематические характеристики формирователей напряжения смещения и нелинейного элемента с зоной нечувствительности; на фиг. 3 - зависимость моментов двигателей и суммарного момента от момента нагрузки. Устройство для управления двухдвигательным электроприводом содержит общий регулятор 1 скорости, индивидуальные для каждого электродвигателя регуляторы 2 и 3 тока первый формирюватель 4 напряжения смещения второй формирователь 5 напряжения смещения и нелинейный элемент 6, входы формирователей 4 и 5 напряжения смещения и нелинейного элемента 6 подключены к выходу регуля тора I скорости, выход каждого формирователя 4 и 5 подключен к первому входу соответствующего регулятора 2 и 3 тока, а выход нелинейного элемента 6 подключен к вторым входам регуляторов 2 и 3 тока, выходы коTopbix являются выходами устройства. Устройство работает следующим образом. Сигнал Upc регулятора 1 скорости, в статике ; пропорщюнальный моменту нагрузки Mfj, через формирователи 4 и 5 напряжения смещения подается на входы регуляторов 2 и 3 тока. Когда момент нагрузки М„ О, на выходе первого и второго формирователей 4 и 5 суп№ствуют равные по величине и противоположные по знаку напряжения UQ (фиг. 2 которые задают начальные моменты распора Mjo и Мзо (фиг. 3). Пока момент нагрузки не превышает номинального момента одного двигателя (в относительных единицах Мц 1) напряжение на выходе регулятора скорости лежит в пределах О Up 0,5. Первыйформирователь 4 работает на участке в-d, а второй - на участке а-в своей статической характеристики, при этом первый двигатель (не показан) работает в двигательном режиме (фиг. 3, участок е-d, М, 0), а второй - в тормозном (фиг. 3, участок а-в, Мз 0), осуществляя выборку мертвого хода в передаче. Когда момент нагрузки М„ 1; Upc 0,5, напряжение на первом формирователе остается неизменным, задавая номинальный момент первого двигателя М, 1 (участок d-c, фиг. 2). Второй двигатель переходит в двигательный режим (участок в-с статической характеристики). При максимальной нагрузке в установивщемся режиме напряжение регулятора скорости не должно превышать величины (точка с фиг. 2) чему соответствует номинальная нагрузка обоих двигателей (точка с фиг. 3). При отработке системой управляющих воздействий напряжение на выходе регулятора х скорости может на время переходного процесса превыщать значение Up, 1. В этом случае на входах регуляторов тока напряжения формирователей 4 и 5 суммируются с напряжением нелинейного элемента 6 (кривая с, фиг. 2). Таким образом, формируется участок с-i зависимости моментов двигателей М,, Мг f (М„, ирс) (фиг. 3). Ограничение велитаны максимального динамического момента (тока) осуществляется как и в системе подчиненного регулирования, ограничением выходного напряжения регулятора 1 скорости. Данное устройство позволяет обеспечить режим работы двигателей с минимальным потреблением электроэнергии и полностью сохранить высокие динамические показатели системы при отработке управляющих воздействий, а также и диапазон, в котором выбирается зазор в передаче. Формула изобретения Устройство для управления двухдвигательным электроприводом, содержащее общий регулятор скорости, индивидуальные для каждого электродвигателя регуляторы тока, формирователь напряжения смещения, входом подключенный к регулятору скорости, отличающееся тем, что, с целью повышения энергетических показателей, в него дополнительно введены второй формирователь напряжения смещения и нелинейный элемент, входы нелинейного элемента и формирователей напряжения смещения подключены к выходу регулятора скорости, выход каждого формирователя напряжения смещения подключен к входу соответствующего регулятора тока, а выход нелинейного элемента подключен к втбрым входам регуляторов тока, выходы которых являются выходами устройства.
Источники информации, принять(е во вни1иание при экспертизе l. Botim. FUhronofund Reqf euncg von Antennenointrieben fUr,
Soite P6i-ten- Bodenstd tionen,Siemens-Ze tschгift 48И974;НеП 11,5.838-833. 2- Авторское свидетельство СССР N 678631, кл. Н 02 Р 5/46, 1979.
Ф1П.2
«Д/А/д «2
Фиг.З
