Изобретение относится к электротехнике, а именно к многодвигательным электроприводам многороликовых машин, например, для правки сортового проката, рольгангов и др., каждый ролик которых приводится от индивидуального электродвигателя..
Цель изобретения - повышение на- дежности электропривода.
На фиг.1 приведена функциональная схема предлагаемого электропривода; на фиг.2 - нагрузочные кривые; на фиг.3 - механические характеристики каждого индивидуального электропривода .
Электропривод (фиг.1), предназначенный для шестироликовой машины с роликами A,B,C,D,E,F, содержит источник 1 питания, к которому подключены параллельно соединенные якорные обмотки электродвигателей 2, обмотки 3 возбуждения которых подключены к п индивидуальным возбудителям 4, в цепь управления каждого из которых включены последовательно соединенные регулятор 5 скорости и регулятор 6 тока с пoдключeнны ш к их входам соответ- ственно датчиками скорости 7 и тока 8, а также задатчик 9 скорости. Кроме того, электропривод содержит п-1 регуляторов 10 нагрузки, блоков 11 ограничения и усилителей-повторителей 12, налинейный элемент 13 с зоной нечувствительности, инерционное звено 1А, усилитель 15 и задатчик 16 тока, при этом выход задатчика 9 скорости соединен с входом регулятора 5 скорости первого электродвигателя и через усилитель 15 подключен к управляющим входами блоков 11 ограничения, второй вход усилителя 15 подключен к датчику 8 тока первого электродвигателя через инерционное звено 14 и нелинейный элемент 13 с зоной нечувствительности, управляющий вход которого и задающие входы регуляторов 10 нагрузки соединены с задатчиком 16 тока, другие входы каждого из п-1 регуляторов
10нагрузки подключены к выходам соответствующих датчика 8 тока и блока
11ограничения, вход которого соединен с выходом соответствующего усилителя-повторителя 12, подключенным также к задающему входу соответствующего регулятора 5 скорости, выход каждого регулятора 10 нагрузки подключен к одному из входов соответствующего усилителя-повторителя 12,
второй вход каждого из которых связан с соответствующим датчиком 7 скорости. Прокат 17 перемещается между роликами А - F.
j
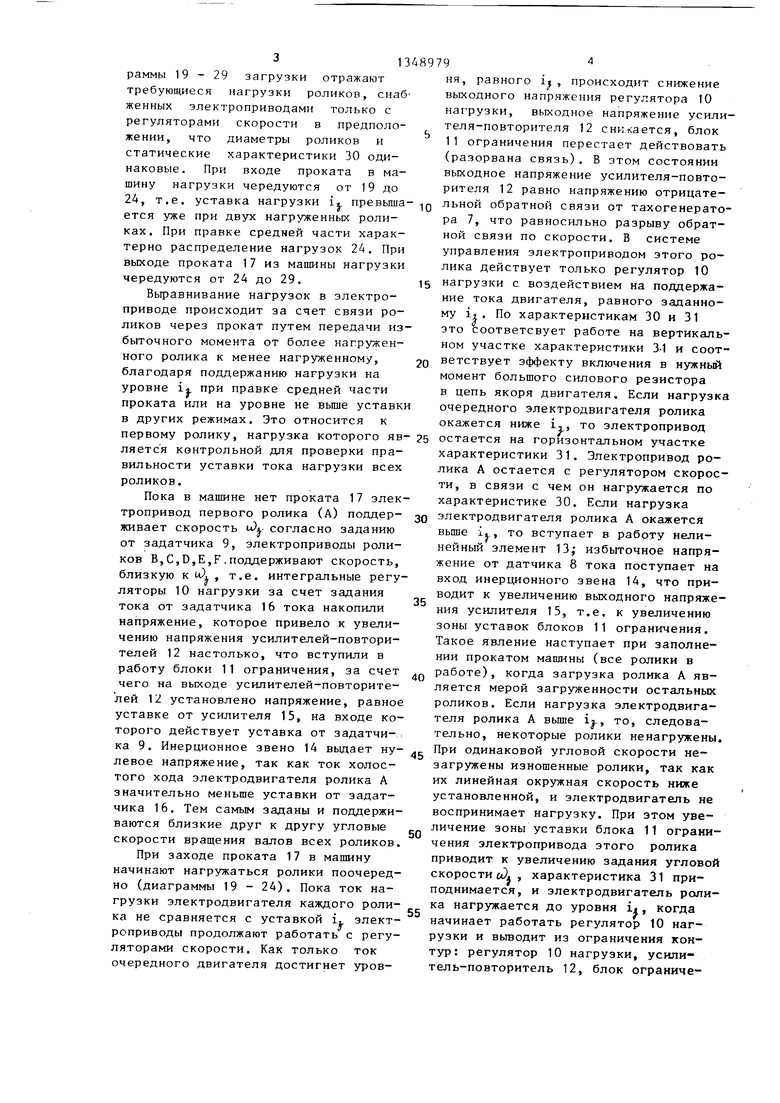
На фиг.2 обозначены: уровень 18 тока выравнивания нагрузки ii ; нагрузка 19 при прокатке в ролике А; нагрузка 20 при прокатке в роликах А,
Q В; нагрузка 21 при прокатке в роликах А,В,С; нагрузка 22 при прокатке в роликах A,B,C,D; нагрузка 23 при прокатке в роликах A,B,C,D,E; нагрузка 24 при прокатке в роликах А,В,С,
5 D,E,F; нагрузка 25 при прокатке в роликах B,C,D,E,F; нагрузка 26 при прокатке в роликах C,D,E,F; нагрузка 27 при прокатке в роликах D,E,F; нагрузка 28 при прокатке в роликах E,F;
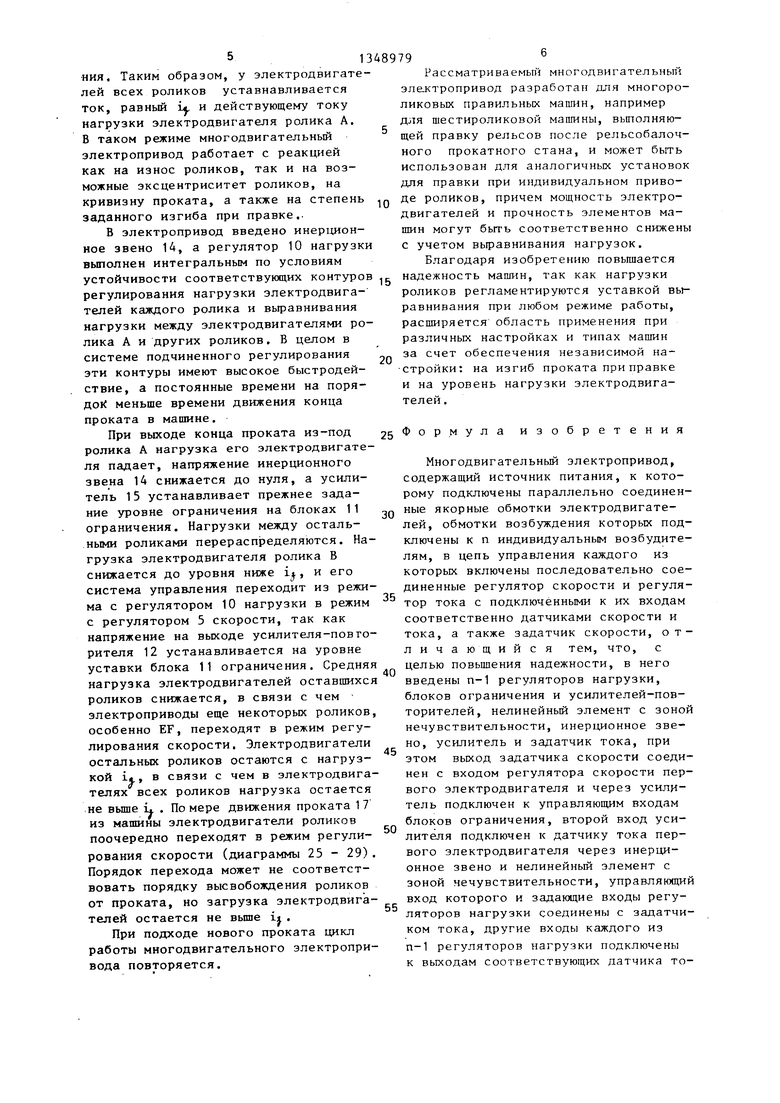
нагрузка 29 при прокатке в ролике F. На фиг.З обозначены: естественная характеристика 30, характеристика 31 с блоком ограничения,
Электропривод работает следующим
5 образом.
Машина для правки проката приводится во вращение электроприводом роликов с источником группового питания, на шины которого включены якор0 ные обмотки электродвигателей 2, Обмотка возбуждения каждого электродвигателя питается от возбудителя 8, управляемого от регулятора 6 тока. Выходной сигнал регулятора 5 скорости ограничен на максимально допустимом уровне тока. Инвертирующий вход усилителя-повторителя 12 соединен с первым входом регулятора 5 скорости, неинвертирующий - с выходом регулятора 10 нагрузки, имеющего ограничение на уровень наибольшего статизма в электроприводе с регулятором скорости. Величина статизма (рабочая) показана на статической характеристике 30 электропривода в форме перепада скорости от нулевой нагрузки до уставки задания тока ij. по характери- стке 31. Максимальный статизм, на-который настраивается ограничение регуляторов 10 нагрузки, соответствует
наибольшему значению i,. Регуляторы
У скорости настраиваются на одинаковый
статизм всех приводов. Точка холостого хода cji, отражает уровень зад&- ния скорости. Уровень нагрузки L соответствует уровню 18 среднего значения нагрузки электроприводов роликов при правке проката, что и выбирается для выравнивания нагрузок. Диаг5
0
5
0
раммы 19-29 загрузки отражают требующиеся нагрузки роликов, снабженных электроприводами только с регуляторами скорости в предположении, что диаметры роликов и статические характеристики 30 одинаковые. При входе проката в машину нагрузки чередуются от 19 до 24, т.е. уставка нагрузки i, превышается уже при двух нагруженных роликах. При правке средней части характерно распределение нагрузок 24. При выходе проката 17 из машины нагрузки чередуются от 24 до 29.
Выравнивание нагрузок в электроприводе происходит за счет евязи роликов через прокат путем передачи избыточного момента от более нагруженного ролика к менее нагруженному, благодаря поддержанию нагрузки на уровне ii при правке средней части проката или на уровне не выше уставки в других режимах. Это относится к
ня, равного 1|, происходит снижение выходного напряжения регулятора 10 нагрузки, выходное напряжение усили теля-повторителя 12 сникается, блок 1 1 ограничения перестает действовать (разорвана связь). В этом состоянии выходное напряжение усилителя-повторителя 12 равно напряжению отрицате Q льной обратной связи от тахогенерато ра 7, что равносильно разрыву обратной связи по скорости. В системе управления электроприводом этого ролика действует только регулятор 10
15 нагрузки с воздействием на поддержание тока двигателя, равного заданному 1з . По характеристикам 30 и 31 это соответсвует работе на вертикальном участке характеристики 3-1 и соот2Q ветствует эффекту включения в нужньй момент большого силового резистора в цепь якоря двигателя. Если нагрузка очередного электродвигателя ролика
лика А остается с регулятором скорости, в связи с чем он нагружается по характеристике 30. Если нагрузка
окажется ниже i,, то электропривод первому ролику, нагрузка которого яв- 25 остается на горизонтальном участке ляется контрольной для проверки пра- характеристики 31. Электропривод ро- вильности уставки тока нагрузки всех роликов.
Пока в машине нет проката 17 электропривод первого ролика (А) поддер- зо электродвигателя ролика А окажется живает скорость согласно заданию выше i., то вступает в работу нели- от задатчика 9, электроприводы роли- нейный элемент 13; избыточное напря- ков В,С,D,E,F.поддерживают скорость, жение от датчика 8 тока поступает на близкую к и), , т.е. интегральные регу- вход инерционного звена 14, что при35
ляторы 10 нагрузки за счет задания тока от задатчика 16 тока накопили напряжение, которое привело к увеличению напряжения усилителей-повторителей 12 настолько, что вступили в работу блоки 11 ограничения, за счет чего на выходе усилителей-повторителей 12 установлено напряжение, равное уставке от усилителя 15, на входе которого действует уставка от задатчи-
40
водит к увеличению выходного напряжения усилителя 15, т.е. к увеличению зоны уставок блоков 11 ограничения. Такое явление наступает при заполнении прокатом машины (все ролики в работе), когда загрузка ролика А является мерой загруженности остальных роликов. Если нагрузка электродвигателя ролика А вьше i, то, следовательно, некоторые ролики ненагружены
ка 9. Инерционное звено 14 выдает ну- g При одинаковой угловой скорости нелевое напряжение, так как ток холостого хода электродвигателя ролика А значительно меньше уставки от задатчика 16. Тем самым заданы и поддерживаются близкие друг к другу угловые скорости вращения валов всех роликов.
При заходе проката 17 в машину начинают нагружаться ролики поочередно (диаграммы 19 - 24). Пока ток нагрузки электродвигателя каждого ролика не сравняется с уставкой L электроприводы продолжают работать с регуляторами скорости. Как только ток очередного двигателя достигнет уровня, равного 1|, происходит снижение выходного напряжения регулятора 10 нагрузки, выходное напряжение усилителя-повторителя 12 сникается, блок 1 1 ограничения перестает действовать (разорвана связь). В этом состоянии выходное напряжение усилителя-повторителя 12 равно напряжению отрицатеQ льной обратной связи от тахогенерато- ра 7, что равносильно разрыву обратной связи по скорости. В системе управления электроприводом этого ролика действует только регулятор 10
5 нагрузки с воздействием на поддержание тока двигателя, равного заданному 1з . По характеристикам 30 и 31 это соответсвует работе на вертикальном участке характеристики 3-1 и соотQ ветствует эффекту включения в нужньй момент большого силового резистора в цепь якоря двигателя. Если нагрузка очередного электродвигателя ролика
лика А остается с регулятором скорости, в связи с чем он нагружается по характеристике 30. Если нагрузка
окажется ниже i,, то электропривод остается на горизонтальном участке характеристики 31. Электропривод ро-
электродвигателя ролика А окажется выше i., то вступает в работу нели- нейный элемент 13; избыточное напря- жение от датчика 8 тока поступает на вход инерционного звена 14, что при
водит к увеличению выходного напряжения усилителя 15, т.е. к увеличению зоны уставок блоков 11 ограничения. Такое явление наступает при заполнении прокатом машины (все ролики в работе), когда загрузка ролика А является мерой загруженности остальных роликов. Если нагрузка электродвигателя ролика А вьше i, то, следовательно, некоторые ролики ненагружены.
0
5
загружены изношенные ролики, так как их линейная окружная скорость ниже установленной, и электродвигатель не воспринимает нагрузку. При этом увеличение зоны уставки блока 11 ограничения электропривода этого ролика приводит к увеличению задания угловой скорое . , характеристика 31 приподнимается, и электродвигатель ролика нагружается до уровня i., когда начинает работать регулятор 10 нагрузки и выводит из ограничения контур: регулятор 10 нагрузки, усилитель-повторитель 12, блок ограниче5
ния. Таким образом, у электродвигатлей всех роликов уставнавливается ток, равный iy и действующему току нагрузки электродвигателя ролика А В таком режиме многодвигательный электропривод работает с реакцией
как на износ роликов, так и на возможные эксцентриситет роликов, на кривизну проката, а также на степень заданного изгиба при правке..
В электропривод введено инерционное звено 14, а регулятор 10 нагрузки выполнен интегральным по условиям
устойчивости соответствующих контуров надежность машин, так как нагрузки
регулирования нагрузки электродвигателей Кс1ждого ролика и выравнивания нагрузки между электродвигателями ролика А и других роликов. В целом в системе подчиненного регулирования эти контуры имеют высокое быстродействие, а постоянные времени на порядок меньше времени движения конца проката в машине.
При выходе конца проката из-под ролика А нагрузка его электродвигателя падает, напряжение инерционного звена 14 снижается до нуля, а усилитель 15 устанавливает прежнее задание уровне ограничения на блоках 11 ограничения. Нагрузки между остальными роликами перераспределяются. Нагрузка электродвигателя ролика В снижается до уровня ниже i, и его система управления переходит из режима с регулятором 10 нагрузки в режим с регулятором 5 скорости, так как напряжение на выходе усилителя-повторителя 12 устанавливается на уровне уставки блока 11 ограничения. Средняя нагрузка электродвигателей оставшихся роликов снижается, в связи с чем электроприводы еще некоторых роликов особенно EF, переходят в режим регулирования скорости. Электродвигатели остальных роликов остаются с нагрузкой it,, в связи с чем в электродвигателях всех роликов нагрузка остается не выше и . По мере движения проката 17 из машины электродвигатели роликов поочередно переходят в режим регулирования скорости (диаграммы 25 - 29). Порядок перехода может не соответствовать порядку высвобождения роликов от проката, но загрузка электродвигателей остается не вьш1е ij .
При подходе нового проката цикл работы многодвигательного электропривода повторяется.
Рассматриваемьп многодвигательный эле-ктропривод разработан для многоро- ликовьк правильных машин, например для шестироликовой машины, выполняющей правку рельсов после рельсобалоч- ного прокатного стана, и может быть использован для аналогичных установок для правки при индивидуальном приводе роликов, причем мощность электродвигателей и прочность элементов машин могут быть соответственно снижены с учетом выравнивания нагрузок.
Благодаря изобретению повышается
0
5
0
0
5
0
5
роликов регламентируются уставкой выравнивания при любом режиме работы, расширяется область применения при различных настройках и типах машин за счет обеспечения независимой на- стройки: на изгиб проката при правке и на уровень нагрузки электродвигателей .
Формула изобретения
Многодвигательный электропривод, содержащий источник питания, к которому подключены параллельно соединенные якорные обмотки электродвигателей, обмотки возбуждения которых подключены к п индивидуальным возбудителям, в цепь управления каждого из которых включены последовательно соединенные регулятор скорости и регулятор тока с подключёнными к их входам соответственно датчиками скорости и тока, а также задатчик скорости, о т - л и ч а ю щ и и с я тем, что, с целью повьш1ения надежности, в него введены п-1 регуляторов нагрузки, блоков ограничения и усилителей-повторителей, нелинейный элемент с зоной нечувствительности, инерционное звено, усилитель и задатчик тока, при этом выход задатчика скорости соединен с входом регулятора скорости первого электродвигателя и через усилитель подключен к управляющим входам блоков ограничения, второй вход усилителя подключен к датчику тока первого электродвигателя через инерционное звено и нелинейный элемент с зоной нечувствительности, управляющий вход которого и задающие входы регуляторов нагрузки соединены с задатчи- ком тока, другие входы каждого из п-1 регуляторов нагрузки подключены к выходам соответствующих датчика тока и блока ограничения, вход которого соединен с выходом соответствующего усилителя-повторителя, подключенным также к задающему входу соответствующего регулятора скорости, выход каждого регулятора нагрузки подключен к одному из входов соответствующего усилителя-повторителя, второй вход каждого из которых связан с соответствующим датчиком скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Способ управления многодвигательным электроприводом постоянного тока листового прокатного стана | 1985 |
|
SU1274113A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
Изобретение относится к электротехнике и может быть использовано в устройствах для правки сортового проката. Целью изобретения является повышение надежности. Электропривод содержит регуляторы 10 нагрузки, соединенные с задатчиком 16 тока. Другие входы каждого из (п-1) регуляторов 10нагрузки подключены к выходам соответствующих датчика 8 тока и блока 11ограничения. В предлагаемом устройстве нагрузки роликов регламентируются уставкой вьфавнивания при любом режиме работы. Мощность электродвигателей и прочность элементов машин могут быть соответственно снижены с учетом выравнивания нагрузок. 3 ил. (Л со . 00 со ;о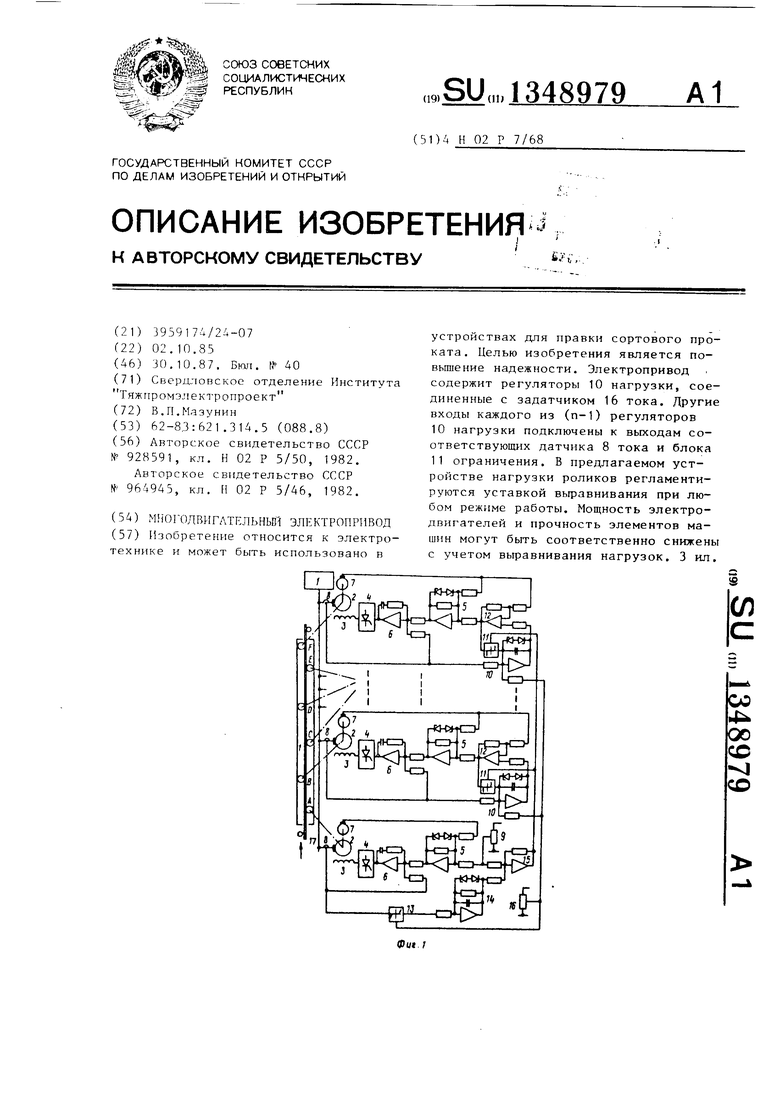
Составитель В.Кузнецова Редактор Т.Парфенова Техред Л.Олийнъос Корректор Н.Король
Заказ 5198/56 Тираж 658Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раущская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.Проектная,4
Фиг. 3
h
| Электропривод | 1980 |
|
SU928591A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления многодвигательным электроприводом | 1981 |
|
SU964945A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
