H.ujopcTCHiR (ггпосится к иыформанионП1,1м устройствам, в частности к устройствам изации сбора, обработки и иредстав.тения информации о расположении, например, рудничных электровозов по выработкам в шахта.х. Известно устройство для контроля местоположения нодвижного объекта, содержащее блок обработки информации и включенные последовательно блок передачи информации и Н1ифратор 1. Недостатком известного устройства является низкая достоверность считываемой и |формации. Цель изобретения - повышение достоверности считываемой информации. Поставленная цель достигается тем, что устройство для контроля местоположения подвижного объекта, содержащее блок обработки информации и включенные гюследовательно блок передачи информации и шифратор, снабжено блоком преобразования кода, который содержит элемент памяти, элемент ИЛИ, элемент выдержки времени, ключевые элементы, элемент НЕ, выходом подключенный к первому входу элемента И и к одним входам ключевых элементов, выходами соединенных с блоком обработки информации, другими входами - с выходом элемента памяти, информационные входы которого подключены к соответствующим входам элемента ИЛИ и выходу блока передачи информации, а разрещающий вход и второй вход элемента И подключены к выходу элемента выдержки времени, входом подключенного к выходу элемента ИЛИ, который соединен с входом элемента НЕ. На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 функциональная схема блока преобразования кода. Устройство состоит из блока 1 передачи информации, в который входят передатчики 2, установленные на подвижных объектах, связанных с приемниками 3, установленными в точках съема информации, и выходами подключенные к щифратору 4, например типа ТКУ-2, куда входят полукомплекты 5 контролируемого пункта, каждый из которых имеет два входа, подключенные к своему выходу приемника 3. Выходы полукомплектов 5 контролируемого пункта подключены к входам своих полукомплектов 6 пункта управления, входящих в состав шифратора 4. Каждый из полукомплектов 6 пункта управления имеет два выхода, каждый из которых подключен к соответствующему входу блока 7 преобразования кода, образованному входами входящих в состав блока 7 преобразования кода отдельных блоков 8, первые выходы отдельных блоков 8 подключены к соответствующим входам модулей 9 дискретных сигналов, а вторые выходы - к соответствующим модулям 10 инициативных дискретных сигналов, входяпшх в состав блока 11 обработки информации, и выходами, подключенными через коммутатор 12 и вычислительную мащину 13 к видеотерминальному устройству 14. Входы отдельно1-о блока 8 а, в, c,d, е образованы входами элемента 15 памяти и подключенными к ним входами элемента ИЛИ 16, выход которого подключен к входу элемента 17 задержки времени и входу элемента НЕ 18, выход которого подключен к первым входам ключевых элементов 19 и к первому входу элемента И 20, а другие входы ключевых элементов 19 подключены к соответствующим выходам элемента 15 памяти. Устройство работает следующим образом. Иередатчпк 2, устанавливаемый на электровозе, представляет собой генератор высокой частоты, нагруженный на антенну и модулируемый генераторами низкой частоты. Пять низкочастотных генераторов служат для кодирования номера электрювоза в двоично-десятичном коде. Номер электровоза набирается путем подключения соответствующих генераторов к модулирующе.му каскаду передатчика 2. При прохождении электровозом одной из точек отбора информации сигнала через антенну передатчика 2 поступает .на антенны приемника 3. Приемник 3 содержит две антенны, блок определения направления движения электровоза с двумя реле на выходе, приемник кода номера электровоза, нагруженный на пять фильтров, частоты которых соответствуют частотам низкочастотных генераторов, установленных на передатчике 2. Фильтры подключены к выходны.м pe.ie, каждое из которых соответствует разрядам номера электровоза. В приемнике 3 есть реле времени, которое выдерживает в течение одной секунды сигнал о номере электровоза на выходных реле. При поступлении сигнала с проходящего электровоза срабатывает одно из реле, указывающее направление движения электровоза и одновременно срабатывают выходные реле номера электровоза. Сигнал о номере электровода существует одну секунду, после чего данный сигнал стирается и приемник готов к приему информации от следующего электровоза. Сигнал о направлении движения электровоза сохраняется до прихода следующего электровоза. Сигнал о номере и направлении движения электровоза поступает на входы полукомплекта 5 контролируемого пункта шифратора 4, шифруется и по двухпроводной линии связи попадает на вход полукомнлекта 6 пункта управления. Один нолукомплект 6 служит для приема сигналов от двух приемников 3.
Полукомплект 5 размещается в выработке шахты в непосредственной близости от точек отбора информации. Полукомплект 6 устанавливается на поверхности Н1ахты в диспетчерском пункте.
Для разделения каналов в шифраторе 4 телемеханической передачи информации используется временное разделение сигналов с распределительным методом избирания. Линия связи поочередно и циклически переключается с одного приемно-передающего канала на последующие. Поочередное переключение производится с помощью двух синхронно и синфазно работающих ферритдиодных распределителей, находящихся в полукомплектах 5 и 6.
Наличие или отсутствие импульса на очередном гакте работы распределителя определяется характер передаваемого сообщепия с объекта, соответствующего данному такту.
Вследствие временного разделения сигнала фронты импульсов на выходе полукомплекта 5 сдвинуты во времени.
Для исключения ложного срабатывания из-за сдвига фронтов импульсов необходимо преобразовать сигнал с выхода полукомплекта 6 в параллельный код, а затем уже подавать на вход блока 11 обработки информации. Кроме того, необходимо подать на его вход сигнал «Код готов после формирования информационного сигнала и выдержать длительность сигнала информации во времени, достаточном для считывания информации вычислительной мащиной 13. Эти функции выполняет блок 7 преобразования кода, состоящий из п отдельных блоков 8 по числу точек отбора информации.
При появлении первого сигнала на выходе элемента ИЛИ 16 появляется логическая единица, что вызывает появление сигнала на выходе элемента 17. Сигнал с выхода элемента 17 разрешает запись в элемент 15 памяти. Одновременно элемент НЕ 18 запрещает работу ключевых элементов 19 и элемента И 20.
подавая на один вход логический ноль. На вторые входы ключевых элементов 19 подаются сигналы с элемента 15 памяти. Запнсь в элемент 15 памяти осуществляется 5 задними фронтами импульсов, поступающих с выхода полукомплекта 6. После окончания последнего сигнала с блока телемеханической передачи информации заканчивается запись в элемент 15 памяти, на выходе элеQ ме}1та ИЛИ 16 появляется логический ноль, на выходе элемента НЕ 18 появляется сигнал, разрешающий работу ключевых элементов 19.
Элемент 17 выдержки времени в течение определенного времени подает на второй вход элемента И 20 сигнал «Код готов. На выходе ключевых элементов 19 появляется сигнал о номере электровоза. После обработки информации элемент 17 выдержки времени отключает сигнал «Код готов, инфор0 мация в элементе 15 памяти стирается и отдельный блок 8 готов к последующей работе. Сигнал о направлении движения электровоза сохраняется до прихода следующего электровоза, поэтому информация о направлении 5 движения подается непосредственно на ключевые элементы 19.
При поступлении сигнала «Код готов на один из входов модуля 10 инициативных дискретных сигналов коммутатор 12 передает сигнал в вычислительную мащину 13, которая проводит его обработку, этот сигнал инициативный и по прерыванию от него будет включена программа приема и обработки информации. Эта программа считывает информацию с соответствующего модуля 9, 5 определяет номер контрольной точки и записывает информацию в существующий массив, если электровоз пришел, и стирает, если ушел.
Кроме того, дляповышения достоверности информации, при обработке каждого номера электровоза проверяется наличие этого номера электровоза в других массивах и, если он там есть, информация стирается. Это исключает ошибку, так как электровоз не может находиться одновременно в различных точках контроля.
Использование предлагаемого устройства позволит диспетчеру следить и более оперативно управлять работой электровозов.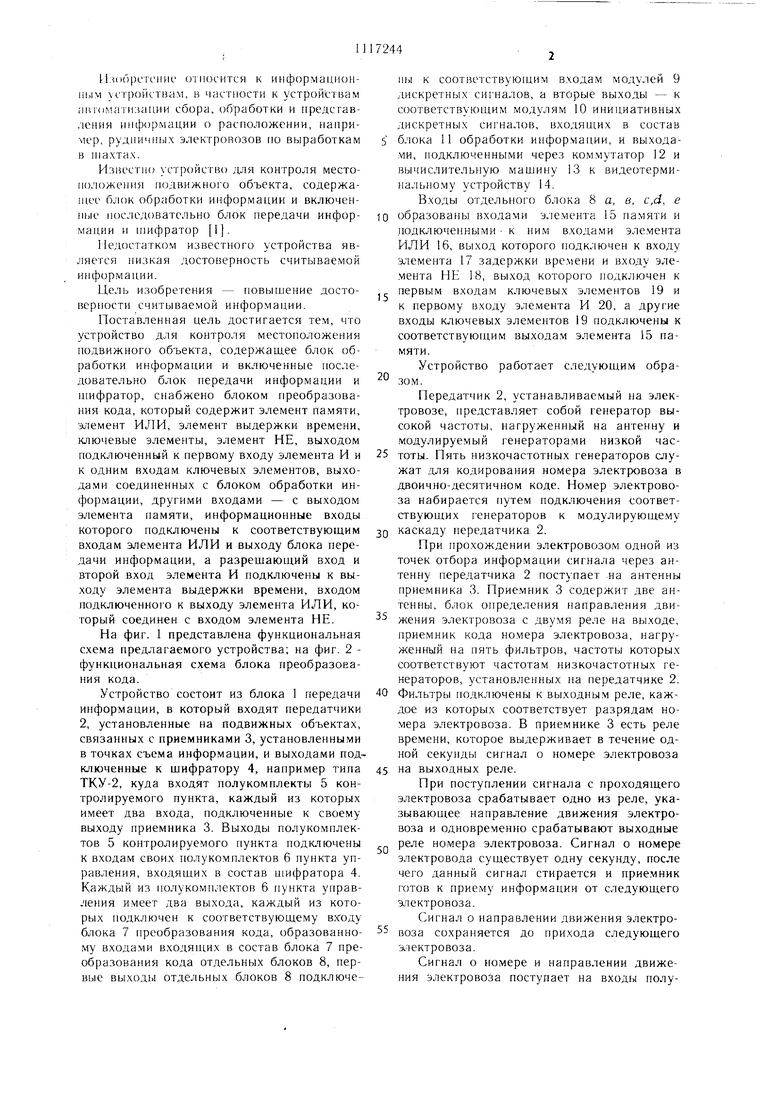
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода инициативных сигналов | 1980 |
|
SU981984A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ НОМЕРА И НАПРАВЛЕНИЯ ДВИЖУЩЕГОСЯ РУДНИЧНОГО | 1973 |
|
SU391957A1 |
| Устройство для автоматического определения номера и направления движущегося рудничного электровоза | 1976 |
|
SU655585A2 |
| Система управления технологическими процессами | 1982 |
|
SU1104561A2 |
| Устройство для телеуправления и телесигнализации с рассредоточенных исполнительных пунктов | 1977 |
|
SU705493A1 |
| Устройство для приема и передачи телеинформации | 1977 |
|
SU696519A1 |
| Устройство для дистанционного управления рудничным электровозом | 1990 |
|
SU1754508A1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ О СОСТОЯНИИ КОНТРОЛИРУЕМЫХ ПУНКТОВ И ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2010338C1 |
| Устройство для передачи информации с сигнальных точек автоблокировки | 1982 |
|
SU1147630A1 |
| Устройство для автоматического заданияМАНЕВРОВыХ МАРшРуТОВ | 1979 |
|
SU839803A1 |
yCTPOFlCTBO ДЛЯ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА, содержащее блок обработки информации и включенные последовательно блок передачи информации и шифратор, отличающееся тем, что, с целью повышения достоверности, оно снабжено блоком преобразования кода, который содержит элемент памяти, элемент ИЛИ, элемент выдержки времени, ключевые элементы, элемент НЕ, выходом п{)дключен} Ы11 к первому входу э.чемента И и к одним входам ключевых элементов, выходами соединенны.ч с блоком обработки информации, другими входами с выходом элемента памяти, информационные входы которого подключены к соответствующим входам элемента ИЛИ и выходу б. передачи информации, а разрешающий вход и второй вход элемента И подключены к выходу элемента выдержки времени, (). подключенного к выходу элемента ИЛИ, который соединен с входом элемента НЕ. § (Л 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| «Уголь Украины, 1978, .Ч 10, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
