ьо
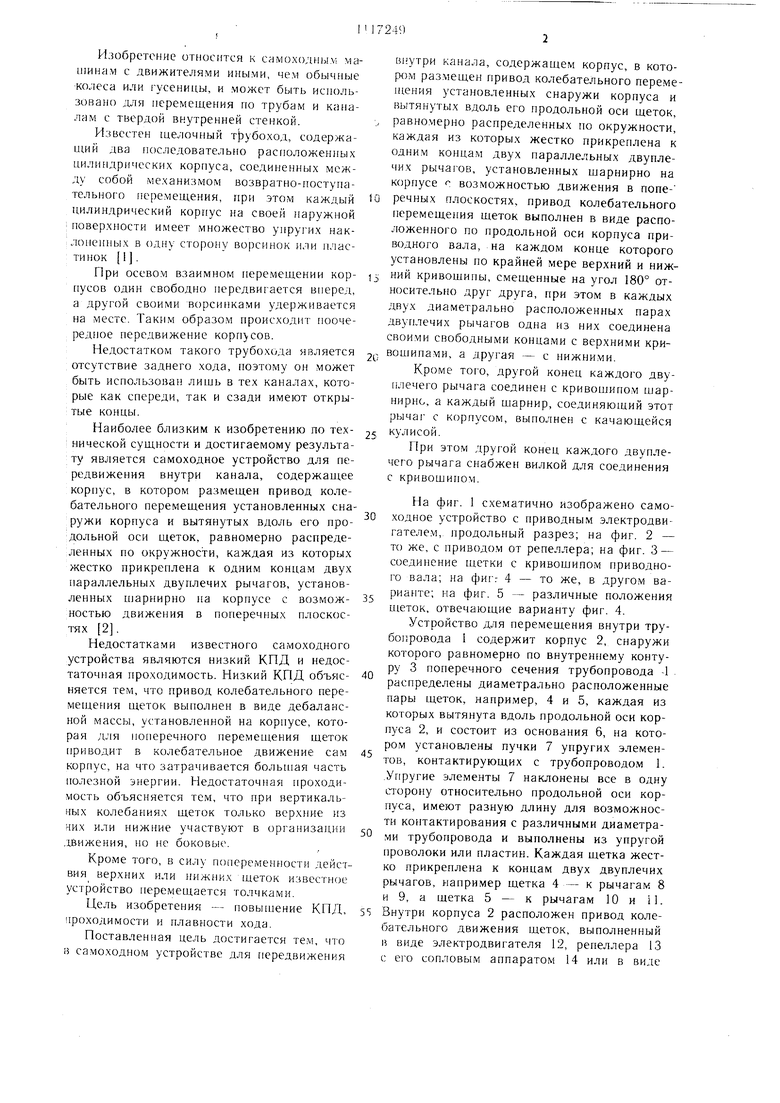
со Изобретение относится к самоходным манжнам с движителями иными, чем обычные колеса или гусеницы, и может быть использовано для перемещения по трубам и каналам с твердой внутренней стенкой. Известен щелочный т эубоход, содержаний два носледователыю расноложенных цилиндрических корпуса, соединенных между собой механизмом возвратно-поступательного перемещения, при этом каждый цилиндрический корпус на своей наружной поверхности имеет множество упрушх наклоненных в одну сторону вореинок или пластинок . При осевом взаимном шремещении корriycoB один свободно передвигается вперед, а другой своими ворсинками удерживается на месте. Таким образом происходит поочередное передвижение корпусов. Недостатком такого трубохода является отсутствие заднего хода, поэтому он может быть иепользовап лищь в тех каналах, которые как спереди, так и сзади имеют открытые концы. Наиболее близким к изобретению по технической сущности и достигаемому результату является самоходное устройство для передвижения внутри канала, содержащее корпус, в котором размещен привод колебательного перемещения установленных снаружи корпуса и вытянутых вдоль его продольной оси щеток, равномерно распределенных по окружности, каждая из которых жестко прикреплена к одним концам двух параллельных двуплечих рычагов, установленных щарнирно па корпусе с возможностью движения в поперечных плоскостях 2. Недостатками известного самоходного устройства являются низкий КПД и недостаточная проходимость. Низкий КПД объясняется тем, что привод колебательного неремендения щеток выполнен в виде дебалансной массы, установленной на корпусе, которая для поперечного перемещения щеток 1риводит в колебательное движение сам корпус, на что затрачивается больпшя часть полезной энергии. Недостаточпая проходимость объясняется тем, что при вертикальных колебаниях щеток только верхние из них или нижние участвуют в организации .движения, но не боковые. Кроме того, в силу попеременности действия верхних или нижних щеток известное устройство перемещается толчками. Цель изобретения - новып ение КПД, проходимости и плавности хода. Поставленная цель достигается тем, что 13 самоходном устройстве для передвижения канала, содержащем корпус, в котором размещен привод колебательного перемещения установленных снаружи корпуса и вытянутых вдоль его продольной оси щеток, равномерно распределенных по окружности, каждая из которых жестко прикреплена к одним концам двух параллельных двуплечих рычагов, установленных щарнирно на корпусе с возможностью движения в поперечных плоскостях, привод колебательного неремещепия щеток выполнен в виде расположенного по продольной оси корпуса приводного вала, на каждом конце которого установлены но крайней мере верхний и нижний кривощипы, смещенные на угол 180° относительно друг друга, при этом в каждых двух диаметрально расноложенных парах двуплечих рычагов одна из них соединена своими свободными концами с верхними кривощипами, а другая - с нижними. Кроме того, другой конец каждого двуплечего рычага соединен с кривопшном щарнирно, а каждый щарнир, соединяющий этот с корпусом, выполнен с качающейся кулисой. При этом другой конец каждого двуплечего рычага снабжен вилкой для соединения с кривощином. На фиг. 1 схематично изображено самоходное устройство с приводным электродвигателем, продольный разрез; на фиг. 2 - то же, е приводом от репеллера; на фиг. 3 - соединение щетки с кривощипом приводного вала; на фиг.- 4 - то же, в другом вариар1те; на фиг. 5 - различные положения щеток, отвечающие варианту фиг. 4. Устройство для перемещения внутри трубо1фовода 1 содержит корпус 2, снаружи которого равномерно по внутренпе.му контуру 3 поперечного сечения трубопровода -1 . распределены диаметрально расположенные пары щеток, например, 4 и 5, каждая из которых вытянута вдоль продольной оси корпуса 2, и состоит из основания 6, на которо.м установлены пучки 7 упругих элементов, контактирующих с трубопроводом 1. .Упругие элементы 7 наклонены все в одну сторону относительно продольной оси корпуса, имеют разную длину для возможности коптактирования с различными диаметра.ми трубопровода и выполнены из упругой проволоки или пластин. Каждая щетка жестко прикреплена к концам двух двуплечих рычагов, например щетка 4 - к рычагам 8 и 9, а щетка 5 - к рычагам 10 и П. Внутри корпуса 2 расположен привод колебательного движения щеток, выполненный в виде электродвигателя 12, репеллера 13 с его сопловым аппаратом 14 или в виде
любого другого известного подходящего дг игателя, имеющего расположенный по продольной оси корпуса 2 приводной вал 15, на концах которого установлены по крайней мере по два кривощипа, верхние 16 и 17 из которых повернуты относительно нижних 18 и 19 на 180°. Все кривощипы могут быть выполнены в виде эксцентриков.
Каждая щетка своими двуплечими рычагами кинематически связана с кривощипами, при этом в каждых двух противоположно расположенных пазах рычагов одна из них соединена своими свободными концами с верхними кривощипами, а другая - с нижними. Например, щетка 4 своими двуплечими рычагами 8 и 9 соединена с нижними кривощипами 18 и 19, а щетка 5, расположенная диаметрально противоположно щетке 4, соединена своими рычагами 10 и 11 с верхними кривощипами 16 и 17. Такая конструкция обеспечивает противофазное движение диаметрально расположенных щеток, чем достигается неподвижность корпуса 2 относительно трубопровода 1.
Все двуплечие рычаги своими свободными концами могут быть соединены с кривощипами щарнирно, как это показано на фиг. 3,когда они проходят через корпус 2 посредством качающихся кулис 20. Этот вариант исполнения колебательного привода щеток позволяет осуществлять различные траектории их движения, которые зависят от соотнощения размеров кривощипно-кулисного механизма. В том случае, если двуплечие рычаги выполнены, как это показано на фиг. 4, т. е. на своих свободных концах имеют вилки 21, сочлененные с кривощипами, то они соединены с корпусом 2 посредством цилиндрических щарниров 22, а закон качания щеток определяется соотнощением размеров, показанных на фиг. 4 и 5 кулисных механизмов. В случае использования электродвигателя 12 устройство снабжено герметичным контейнером 23, в котором помещены источники питания и средства управления. Если же в качестве двигателя использован репеллер 13, то спереди и сзади корпуса 2 установлены эластичные манжеты 24, предотвращающие свободный проход жидкости или газа нерез кольцевое пространство между трубопроводом 1 и корпусом 2.
Т|пи1С110ртируе юе оборудование для техно.югического обслуживания трубопровода, его контроля или ремонта выполнено в виде навесных или буксируемых блоков (не показаио). Количество пар щеток не ограничено, а наивыгоднейщее из них определяется конечными размерами поперечного сечения трубопровода I, что же касается количества кривошипов на каждом конце приводного вала, то как минимум их должно быть два, но может быть и больще, что выбирается исходя из удобства соединения с двуплечими рычагами, а также из необходимости достижения оптимальной плавности
хода.
Движение самоходного устройства осуществляется после того, как его вводят с одного конца в трубопровод и электродвигателем 12 или за счет созданного в трубопроводе 1 потока газа или жидкости репеллером 13 вращают приводной вал 15 с кривошипами на концах, при этом пары диаметрально расположенных щеток будут поочередно выдвигаться и поворачиваться,
если они соединены с кривощипами в соответствии с фиг. 3, или поворачиваться, если они выполнены в соответствии с фиг. 4. В любом из указанных вариантов в каждый момент времени найдутся пучки 7 целых щеток 4 и 5 или их части, которые будут
отталкивать корпус 1 от трудопровода.
Фиг. 5 иллюстрирует планы положений при поворотах вала 15 через 90°, когда в устройстве четыре щетки, они соединены с кривощипами в соответствии с фиг. 4 и в
том случае, если бы упругие пучки 7 не прогибались от взаимодействия с внутренним контуром 3 трубопровода 1.
Поскольку кривощипы 16-19 поочередно двигают двуплечие рычаги с постоянной
угловой скоростью W, то корпус 2 устройства передвигается в трубопроводе плавно без поперечных или продольных толчков.
Применение изобретения позволяет, устранив поперечные колебания корпуса,
увеличить КПД, продольные колебания, динамические перегрузки и повысить проходимость. Кроме того, повыщенная плавность хода обеспечит возможность транспортировки точных приборов без дополнительной амо.ртизации.
o
-&

| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ОЧИСТКИ БЕРД | 1971 |
|
SU307132A1 |
| Карусельная формовочная установка | 1982 |
|
SU1106658A1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012496C1 |
| АВТОМАТ ДЛЯ ЧИСТКИ ОБУВИ | 1971 |
|
SU295553A1 |
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| Машина для печатания тканей сетчатыми шаблонами | 1961 |
|
SU151290A1 |
| Уплотняющий механизм | 1981 |
|
SU950239A1 |
| Планетарный зубчатый привод стеклоочистителя | 2023 |
|
RU2815138C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012497C1 |


1. САМОХОДНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ ВНУТРИ КАНАЛА, содержащее корпус, в котором размещен привод колебательного перемещения установленных снаружи корпуса и вытянутых вдоль его продольной оси щеток, равномерно распределенных по окружности, каждая из которых жестко прикреплена к одним концам двух параллельных двуплечих рычагов, установленных щарнирно на корпусе с возможностью движения в поперечных плоскостях, отличающееся тем, что, с целью повышения КПД, прЬходимости и плавности хода, привод колебательного перемещения щеток выполнен в виде расположенного по продольной оси корпуса приводного вала, на каждом конце которого установлены по крайней мере верхний и нижний кривошипы, смещенные на угол 180° относительно друг друга, при этом в каждых двух диаметрально расположенных парах двуплечих рычагов одна из них соединена своими свободными концами с верхними кривошипами, а-другая - с нижними. 2.Устройство по п. 1, отличающееся тем, что другой конец каждого двуплечего i рычага соединен с кривошипом щарнирно, (Л а каждый шарнир, соединяющий этот рычаг с корпусом, выполнен с качающейся кулисой. 3.Устройство по п. 1, отличающееся тем, что другой конец каждого двуплечего рычага снабжен вилкой для соединения с кривошипом.
90
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для ультразвукового контроля | 1974 |
|
SU510672A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для перемещения преобразователей, например, ультразвуковых внутри трубопровода | 1975 |
|
SU602854A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
