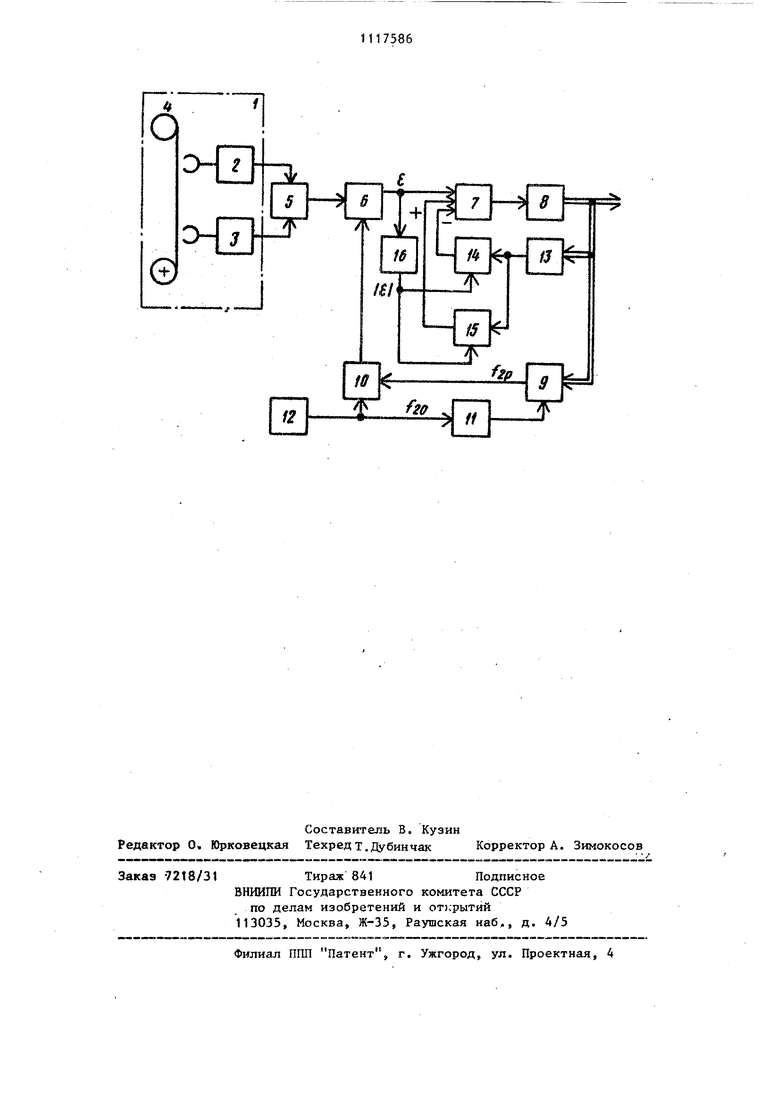
1 Изобретение относится к автоматике и вычислительной технике. По основному авт.св. № 643839, известна фазовая система, содержащая последовательно соединенные устройства ввода программы, основной фазовый дискриминатор, сумматор, привод вращающийся трансформатор, входы которого через фазорасщепитель подключены к выходу генератора напряжения, дополнительный фазовый дискрими натор, первый вход которого соединен с выходом вращающегося трансформатора, второй вход - с выходом генерато ра напряжения, а выход - с другим входом сумматора l. Недостатком известной системы является невозможность достижения высокого быстродействия с малым перерегулированием из-за постоянного действия в регулируемом приводе сигнала отрицательной обратной связи по скорости. Целью изобретения является повышение быстродействия при одновременном уменьшении колебательности переходного процесса. Поставленная цель достигается тем что система содержит формирователь абсолютной величины сигнала, перемно житель, управляемый ключ, тахогенератор, вал которого механически связан с выходным валом привода, и дополнительный сумматор, первый вход которого подключен к выходу основног сумматора, а выход - к входу привода выход тахогенератора подключен к пер вому входу перемножителя и через управляемый ключ - к второму входу дополнительного сумматора, управляющий вход ключа и второй вход перемножителя подключены к выходу формирователя абсолютного значения сигнала, вход которого подключен к выходу основног сумматора, а выход перемножителя под ключен к третьему входу дополнительного сумматора. На чертеже показана функциональна схема предлагаемой системы. Система содержит устройство 1 вво да программы, состоящее из блоков воспроизведения и усиления синусоидальных рабочего 2 и опорного 3 сигн лов,, и лентопротяжного механизма с магнитной лентой 4, основной фазовьпЧ дискриминатор 5., . основной сумматор 6, дополнительный сумматор 7, привод 8, вращающ15Йся трансформатор 9, дополнительный фазовый дискримина 62 гор 10, фазорасщепитель 11, генератор 12 напряжения, тахогенератор 13, управляемый ключ 14, перемножитель 15 и формирователь 16 абсолютной величины сигнала. Система работает следующим образом. В режиме записи программы на магнитную ленту записываются два синусоидальных сигнала: рабочий и опорный. Фаза рабочего сигнала пропорциональна углу поворота вала привода, а частота модуляции - скорости его вращения. В режиме воспроизведения записанные сигналы воспроизводятся и усиливаются блоками 2 и 3 и сравниваются по фазе в фазовом дискриминаторе 5, который формирует на выходе сигнал постоянного тока, пропорциональный фазовому сдвигу между опорным и рабочим сигналами. Величина фазового рассогласования в данном случае пропорциональна заданному углу поворота вала привода 8. Угол поворота вала привода 8 контролируется вращающимся трансформатором 9, работающим в режиме фазовращателя. При этом фаза выходного напряжения трансформатора 9 по отношению к напряжению питания, поступающего от генератора 12 и выполняющего роль опорного напряжения, пропорциональна углу поворота вала привода. Синусоидальные сигналы с частотой f и f pсравниваются по фазе в фазовом дискриминаторе 10, с выхода которого напряжение, пропорциональное действительному углу поворота вала привода, сравнивается в сумматоре 6 с сигналом, пропорциональным заданному программой углу поворота. Сигналы на входах сумматора 6 имеют противоположные знаки. Разность выходных напряжений дискриминаторов 5 и 10 является управляющим сигналом для привода 8. Для повышения точности системы используются два корректирующих сигнала, формируемых с помощью тахогенератора 13, ключа 14, перемножителя 15 и формирователя 16. Ключ 14 управляется сигналом ошибки I I , формируемым на выходе формирователя 16. Ключ замкнут при ошибке равной нулю. При наличии ошибки между заданным и действительным поворотом вала привода 8 ключ 14 разомкнут и отрица.тельная обратная связь по скорости, вводимая с помощью тахогенератора 13 отсутствует. При этом на вход дополнительного сумматора 7 подается сигнал ошибки и с тем же знаком корректирующий сигнал с выхода перемножителя 15, равный произведению ошибк |g.t на скорость выходного вала приво да 8. За счет введения корректирующе го сигнала обеспечивается форсировка переходного процесса. В конце переходного процесса, когда ошибка становится равной (или близкой) нулю, ключ 14 замыкается и величина коэффициента демпфирования системы определяется глубиной обратной связи по скорости выходного вала привода 8, реализуемой с помощью тахогенератора 13, Требуемая величина коэффициентов форсировки и демпфирования определяется установкой коэффициентов передачи по соответствующим входам допол нительного сумматора 7, в качестве которого может быть использован операционный усилитель. Введение в систему формирователя 16 исключает смену знака форсирующей обратной связи при смене знака ошибки . Передаточная функция предлагаемой системы имеет вид W,(p(W(pl (p)K((p|W4p)(ei-w,(Plw,.(p) TV-pfr KjK fCEi-k/jKji K Vi где W(p)K - передаточная функция дополнительного сумматора 7 по первому входу (по входу сигнала ошибки); передаточная функция 2 тУ 2 три;;р--78Г W (p)Kjp - передаточная функция тахогенератора 13; коэффициент передачи сумматора 7 по второму входу; W (Р)КГ - коэффициент передачи сумматора 7 по третьему (форсирующему) входу; Е - ошибка системы; f( о функция переключения b PHlEl So ключа 14; (, - величина порога срабатывания ключа. Коэффициент демпфирования системы определяется вьфажением . значение которого при больших рассогласованиях мало или может быть отрицательным,- что соответствует сильной форсировке переходного процесса. При достижении регулируемой величиной заданного значения (когда|Е|4 р ) форсируюпцш сигнал стремится к нулю, а ключ 14 включает глубокую отрицательную обратную связь по скорости, что обеспечивает эффективное гашение колебаний, возникающих носле изменения сигнала программы на входе сумматора 6. Таким образом, раздельное действие корректирующих; контуров обеспечивает ысокое быстродействие системы с маым перерегулированием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Устройство для управления непосредственным преобразователем частоты | 1971 |
|
SU576654A1 |
| Адаптивное устройство для пространственно-временной обработки фазоманипулированных сигналов | 1984 |
|
SU1234981A1 |
| Следящая система | 1975 |
|
SU555377A1 |
| Фазовая система программного управления | 1980 |
|
SU930265A2 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Устройство синхронизации псевдошумовых сигналов | 1977 |
|
SU680190A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
ФАЗОВАЯ СИСТЕМА ПРОГРАММНОГО -УПРАВЛЕНИЯ по авт.св. № 643839, отличающаяся тем, что, с целью повьшения быстродействия при одновременном уменьшении колебатель11ости переходного процесса, она содержит формирователь абсолютной величины сигнала, перемножитель, управляемый ключ, тахогенератор, вал которого механически связан с выходным валом привода, и дополнительный сумматор, первый вход которого подключен к выходу основного сумматора, а выход - к входу привода, выход тахогенератора подключен к первому входу перемножителя и через управляемый ключ - к второму входу дополнительного сумматора, управляющий вход ключа и второй вход перемножителя подключены к выходу формирователя абсолютного значения сигнала, вход которого подключен к выходу основного сумма- g 4)9 тора, а выход перемножителя подключен- : i к третьему входу дополнительного ,сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фазовая система программного управления | 1977 |
|
SU643839A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
