1
Изобретение относится к электротехнике, в частности к регулируемым электроприводам на базе асинхронных машин с короткозамкнутым ротором, и может быть использовано в механизмах общепромышленного применения, где определяющими являются требования бесконтактности и высокой надежности.
Известен асинхронный электроприво Содержащий асинхронную машину с короткозамкнутым ротором, статорные обмотки которой подключены к выходам силового преобразователя, выполненного в виде фазных усилителей тока, блок задания активной и реактивной составляюпрх тока статора, эыходы которого подключены к управляющим входам блока преобразования координат, соединенного выходами с управляющими входами силового преобразователя, блок вьщеления фазных ЭДС, входы которого подключены к выходам датчиков фазных токов и напряжений статора, а выходы связаны с входами для опорных сигналов блока преобразования координат m.
Недостатком электропривода является сложность схемного решения изза наличия аналоговых умножителей и делителей, что определяет и низкую надежность.
Наиболее близким к изобретению по технической сущности является асинхронньй электропривод, содержащий асинхронную машину с короткозамкнутым ротором, статорные обмотки которой подключены к выходам преобразователя частоты, блок задания активной и реактивной составляюпдах тока статора, выходы которого подключены к управляющим входам блока преобразования координат, соединенного выходами с управляющими входами преобразователя частоты, блок вьщеления фазных ЭДС, входы которого подключены к выходам датчиков фазных токов и напряжений статора, а выходы соединены с блоком определения модуля ЭДС, выход которого подключен к входу управляемого генератора, соединенного выходом с входом для опорного сигнала блока преобразования координат 21.
Недостатками известного асинхронного электропривода являются сложность схемы из-за наличия аналоговых умножителей и низкая надежность.
132
Целью Изобретения является повышение надежности асинхронного электропривода путем упрощения схемы.
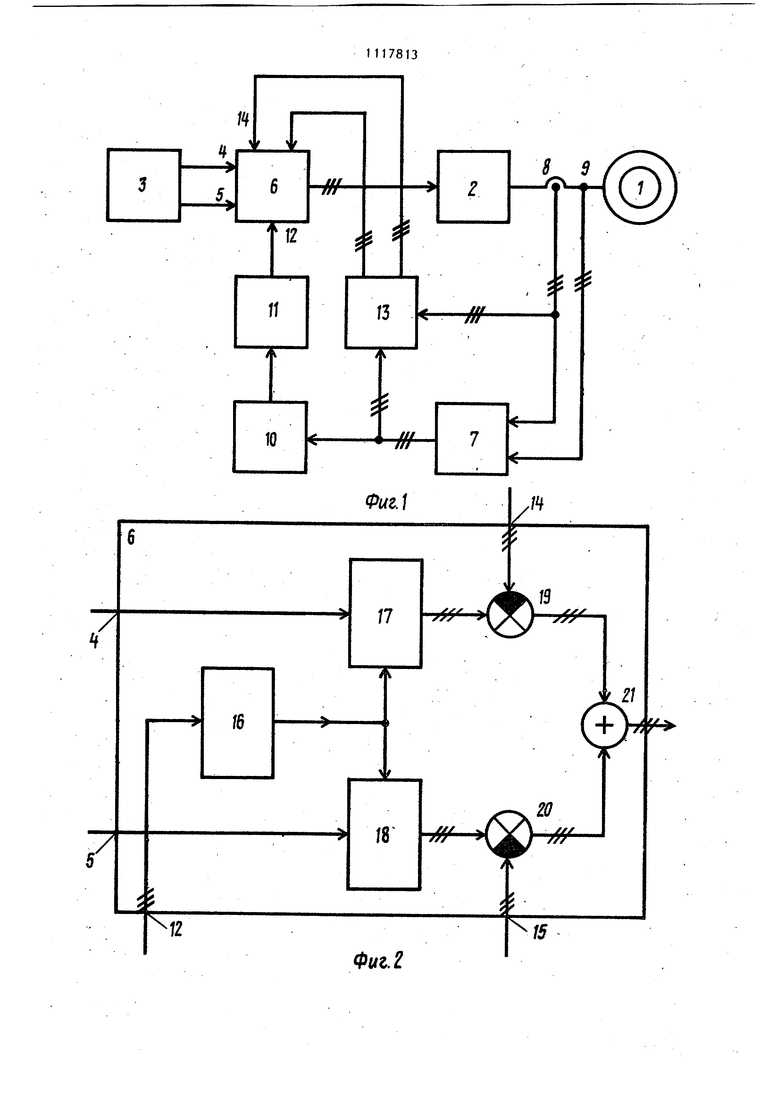
Указанная цель достигается тем, что в асинхронный электропривод, содержащий асинхронную машину с короткозамкнутым ротором, статорные обмотки которой подключены к выходам преобразователя частоты, блок задания активной и реактивной составляющих тока статора, выходы которого подключены к управляющим входам блока преобразования координат, соединенного выходами с управляющими входами преобразователя частоты, блок выделения фазных ЭДС, входы которого подключены к выходам датчиков фазных токов и напряжений статора, а выходы соединены с блоком определения модуля ЭДС, выход которого подключен к входу управляемого генератора, соединенного выходом с входом для опорного сигнала блока преобразования координат, введен блок определения действительных значений активных и реактивных составляющих фазных токов статора, входы которого подключены к выходам датчиков фазных токов статора и к выходам блока вьделения фазньк ЭДС, а выходы соединены с дополнительно введенньми входами блрка преобразования координат, состоящего из кольцевого счетчика, двух модуляторов и трех сумматоров, входы первого из которых подключены к выходам первого модулятора и к первому дополнительному входу блока преобразования координат, входы второго сумматора подключены к выходам второго модулятора и к второму дополнительному входу блока преобразования координат, выходы кольцевого счетчика подключены к опорным входам модуляторов, выходы первого и второго сумматоров соединены с входами третьего сумматора, выход которого образует выход блока преобразования координат, при этом управляю1цие вход модуляторов и вход кольцевого счетчика образуют соответственно управлящие входы и вход для опорного сигнала блока прео бразования координат.
На фиг. 1 представлена структурная схема асинхронного электропривода; на фиг. 2 - схема блока преобразования координат; на фиг. 3 схема блока определения действительных значений активных и реактивных составляющих фазных токов. Асинхронный электропривод содержит асинхронную машину 1 с короткоэамкнутьм ротором, статорньге обмотки которой подключены к выходам преобразователя 2 частоты, блок 3 задания активной и реактивной составляющих тока статора, выходы которого подключены к управляющим входам Л и 5 блока 6 преобразования координат, соединенного выходами с управляющими входами преобразователя 2 частоты, блок 7 вьиеления фазных ЭДС, входы которого подключены к выходам датчиков 8 фазных токов статора и к выходам датчиков 9 фазных напряжений статора, а выходы соединены с блоком 10 определения модуля ЭДС, выход которого подключен к входу управляемого генератора11 соединенного выходом с входом 12 для опорного сигнала блока 6 преобразования координат, блок 13 определения действительных значений активных и реактивных составляющих фазных токов статора, входы которого подключейы к выходам датчиков 8 фазных токов статора и к выходам блока 7 вьоделения фазных ЭДС, а выходы соединены с дополнительно введенными входами 14 и 15 блока 6 преобразования координат состоящего из кольцевого счетчика 16 двух модуляторов 17 и 18 и трех сумматоров 19-21, при этом один из входов первого сумматора 19 подключен к выходу первого модулятора 17, один из входов второго сумматора 20 подключен к выходу второго модулятора 18, вторые входы первого и второго сумматоров 19 и 20 образуют соответственно первый и второй дополнительные входы 14 и 15 блока 6 преобразования координат, выходы кольцевого счетчика 16 подключены к опорным входам модуляторов 17 и 18, выходы первого и второго сумматоров 19 и. 20 соединены с входами третьего сумматора 21, выход которого образует выход блока 6 преобразования координат, а управляющие входы модуляторов 17 и 18 и вход кольцевого счетчика 16 образуют соответственно управляющие входы 4 и 5 и бход 12 для опорного сигнала блока 6 преобразования координат. Блок 13 определения действительных значений активных и реактивных составляющих фазных токов 13 статора содержит интеграторы 22, выходы которых подключены к сумматорам 23. Выходы сумматоров 23 и интеграторов 22 подключены соответственно к дополнительным входам 14 и 15 блока преобразования координат, другие входы сумматоров 23 подключены к выходам датчиков 8 фазных токов статора, а входы интеграторов 22 - к выходам блока 7 выделения фазных ЭДС. Асинхронный электропривод работает следующим образом. По сигналам, поступаю1щм с выходов датчиков 8 и 9 фазных токов и напряжений статора, на выходе блока 7 вьделения фазных ЭДС формируются сигналы, пропорциональные мгновенным значениям фазных ЭДС асинхронной машины 1. Указанные сигналы поступают на входы блока 10 определения модуля ЭДС и на входы блока 13 определения действительных значений активных и реактивных составляюпщх фазных токов статора (на входы интеграторов 22, фиг. 3). При этом на выходах интеграторов 22 формируются сигналы,пропорциональные мгновенным значениям фазньгх токов намагничивания асинхронной машины 1. С помощью сумматоров 23 осуществляются операции вычитания сигналов, пропорциональных мгновенньм значениям фазных токов, поступающих с выходов датчиков 8 фазных токов статора, из выходных сигналов интеграторов 22. При этом на выходах сумматоров 23 формируются сигналы, пропорциональные мгновенным фазным активным токам асинхронной машины. Выходные сигналы сумматоров 23 и интеграторов 22 поступают на один из входов сумматоров 19 и. 20 в блоке 6 преобразования координат (фиг. 2). Модуляторы 17 и 18 формируют на своих выходах трехфазные системы задающих напряжений, причем выходные напряжения в каждой фазе модулятора 17 опережают выходные напряжения в соответствующей фазе модулятора 18 на угол 1 / 2. Амплитуды напряжений на выходах модуляторов 17 и 18 определяются сигналами постоянного тока на входах 4 и 5 соответственно, поступающих с блока 3 задания активной и реактивной составляющих тока статора.. 1 Синхронизация и частота модуляторов 17 и 18 обеспечиваются общим кольцевым счетчиком t6, выход которого подключен к опорным входам обо их модуляторов. Кольцевой счетчик 16 выполнен в виде регистра сдвига, так что частота импульсног-о напряжения на его выходе строго пропорци нальна частоте импульсного напряжения на его вхоДе, подключенного к в ходу управляющего генератора 11. Частота импульсов на выходе гене ратора 11 пропорциональна сигналу постоянного тока на его входе, т.е. сигналу,, пропорциональному модулю ЭДСЕ, формируемому в блоке 10 определения модуля ЭДС по сигналам фазных ЭДС. При этом частота f задающих напряжений на выходах модуляторов 17 и 18 также пропорциональна модулю ЭДС Е. На вход 4 модулятора 17 подается управляющее напряжение постоянного тока, пропорциональное желаемому значению амплитуда активной составляющей фазных токов. Тогда на выход модулятора 17 формируется трехфазна система задающих напряжений с ампли тудами, пропорциональными желаемым значениям амплитуд активных составляющих токов фаз асинхронной машины Задающие трехфазные напряжения на входах сумматора 19 сравниваются с измеренными мгновенными значениями активных составляющих токов фаз, noc тупающими на входы 14 блока 6 преобразования координат. В результате на выходах сумматора 19 формируется трехфазный сигнал ошибки по активной составляющей токов фаз. На вход 5 модулятора 18 подается -управляющее напряжение постоянного тока, пропорциональное желаемому значению амплитуды реактивной составляющей фазных токов. Тогда на выходах модулятора 18 формируется трехфазная система задающих напряжений с амплитудами, пропорциональными желаемым значениям амплитуд реактивных составляющих токов фаз асинхрон36ной машины 1. Задающие трехфазные напряжения на входах сумматора 20 сравниваются с измеренными мгновенными значениями реактивных составляющих токов фаз, поступающими на входы 15 блока 6 преобразования координат. В результате на выходах сумматора 20 формируется трехфазный сигнал ощибки по реактивной составлякщей токов . фаз. Сигналы ошибок на выходах сумматоров 19 и 20 суммируются на сумматоре 21, на выходе которого образуется трехфазный сигнал суммарной ошибки, который подается на управление преобразователем 2 частоты. При достаточно вьюоких коэффициентах усиления контуров отрицательных обратных связей по активным и реактивным составляющим токов фаз действительные значения указанных составляю1Щ1х . в асинхронной машине 1 соответствуют заданным. Частота токов в фазах асинхронной машины 1 соответствует частоте f на выходах модуляторов 17 и 18, которая, в свою очередь, пропорциональна модулю ЭДС Е. Момент асинхронной машины 1 (в режиме постоянства потока) определяется амплитудой выходного напряжения модулятора 17, т.е. сигналом задания активной составляющей тока, а поток определяется амплитудой выходного напряжения модулятора 18, т.е. сигналом задания реактивной составляющей тока. Таким образом, введение в асинхронный электропривод блока определения действительных значений активных и реактивных составляющих фазных токов статора и выполнение блока преобразования координат на основе модуляторов обеспечивает регулирование момента в асинхронной машине 1 при постоянстве потока без применения аналоговых умножителей, что упрощает конструкцию, исключает необходимость настройки в цепях задания фазных токов и повышает надежность асинхронного электропривода.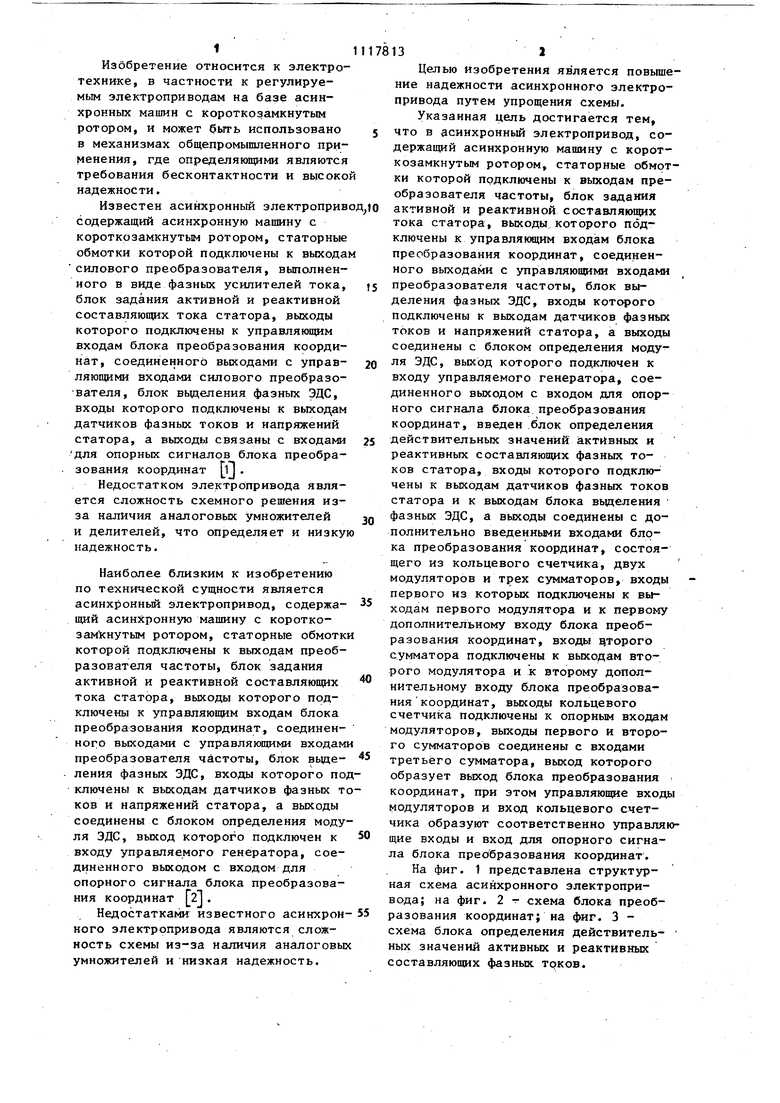


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод | 1991 |
|
SU1837379A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372577A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1989 |
|
SU1646035A2 |

АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронную машину с короткозамкнутым ротором, статорные обмотки которой подключены к выходам преобразователя частоты, блок задания активной и реактивной составляющих тока статора, выходы которого подключены к управляющим входам блока преобразования координат, соединенного выходами с управляющими входами преобразов.ателя частоты, блок вьщеления фазных ЭДС, входы которого подключены к выходам датчиков фазных токов и напряжений статора, а выходы соединены с блоком определения модуля ЭДС, выход которого подключен к входу управляемого генератора, соединенного выходом с входом для опорного сигнала блока преобразования координат, отличающийс я тем, что, с целью повышения его надежности, введен блор определения действительных значений активных и реактивных составляющих фазных токов статора, входы которого подключены к выходам датчиков фазных токов статора и к выходам блока вьщеления фазных ЭДС а выходы соединены С дополнительно введенными входами блока преобразования координат, состоящего из кольцевого счетчика, двух модуляторов и трех сумматоров, причем один из входов первого сумматора подключен к выходу первого модулятора, один из входов второго сумматора подключен к выходу второго (Л модулятора, вторые входы первого и второго сумматоров образуют соответственно первый и второй дополнительные входы блока преобразования координат, выходы кольцевого счетчика подключены к опорным входам модуляторов, выходы первого и второго сумматоров соединены с входами третьего сумматора, выход которого образует выход блока преобразования -ч1 координат, а управляющие входы модуэо со ляторов и вход кольцевого счетчика образуют соответственно управляющие входы и вход для опорного сигнала i блока преобразования координат. |
PweJ
/
4
/9
У
xw f
f6
5
N2
1L21
го
)
//X
15
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ частотно-токового управления асинхронной машиной | 1973 |
|
SU493882A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
