2. Подвеска по п. 1, отличающаяся тем, что она снабжена установленными в первой раме прижимньлми приспособлениями для канатов полиспаста, включающими в себя пары двуплечих рычагов, на одном конце каждого из которых установлен подпружиненный , а на другом прижимной ролик для каната, при этом на второй раме жестко закреплены фигурные упоры для взаимодействия с подпружиненными роликами.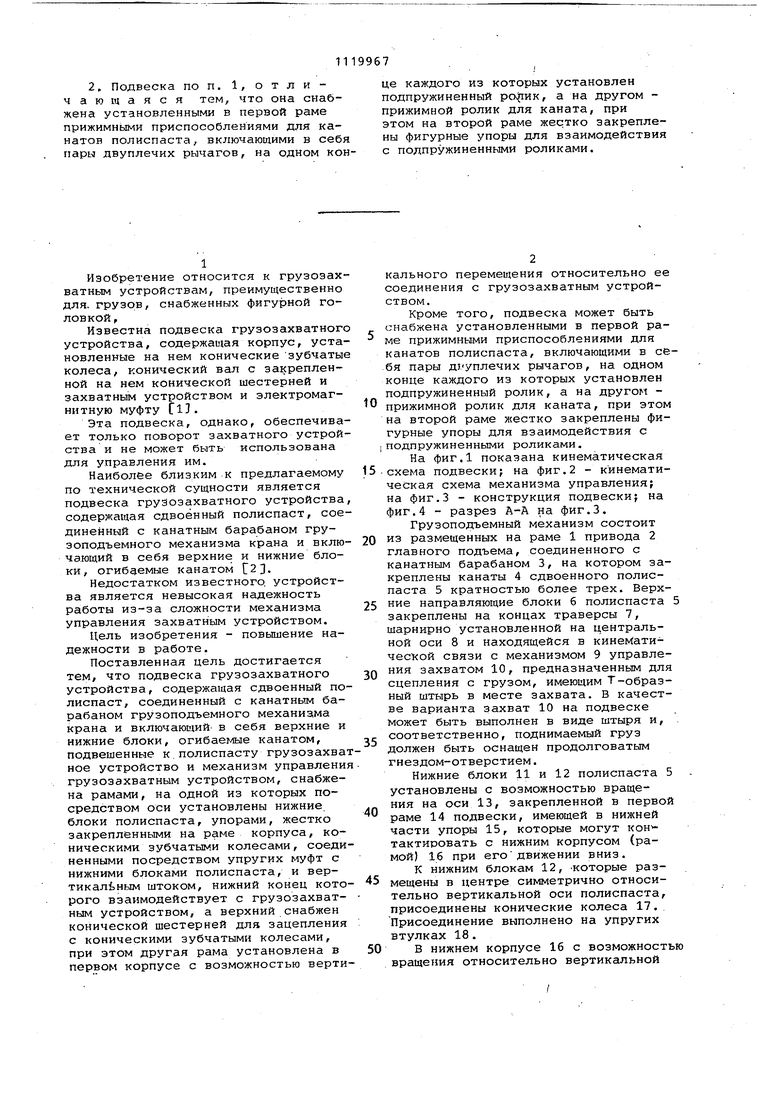

| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Грузоподъемное устройство | 1979 |
|
SU872443A1 |
| Грузоподъемное устройство | 1989 |
|
SU1724562A1 |
| Грузозахватное устройство | 1983 |
|
SU1134526A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2003 |
|
RU2265571C2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Обойма полиспаста | 1975 |
|
SU592728A1 |
| Мобильное средство для монтажа трубопроводных модулей | 2016 |
|
RU2620185C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
1. ПОДВЕСКА ГРУЗОЗАХВАТНОГ УСТРОЙСТВА, содержащая сдвоенный по лиспаст, соединенный с канатным барабаном грузоподъемного механизма крана и включающий в себя верхние и нижние блоки, огибаемые канатом, отличаюц4аяся тем, что. с целью повышения надежности в работе, она снабжена рамами, на одной из которых посредством оси установлены нижние блоки полиспаста, упорами, жестоко закрепленными на раме корпуса, коническими зубчатыми колесами, соединенными посредс вом упругих муфт с нижними блоками полиспаста, и вертикальным штоком, нижний конец которого расположен с возможностью взаимодействия с грузозахватным устройством, а верхний снабжен конической шестерней для зацепления с коническими зубчатыми колесами, причем другая рама установл ена в первом корпусе с возможностью вертикального перемещения относительно ее соединения с грузозахвАтным устройством.
Изобретение относится к грузозахватным устройствам, преимущественно для. грузов, снабженных фигурной головкой ,
Известна подвеска грузозахватного устройства, содержащая корпус, установленные на нем конические зубчатые колеса, конический вал с заг репленной на нем конической шестерней и захватным устройством и электромагнитную муфту Г13.
Эта подвеска, однако, обеспечивает только поворот захватного устройства и не может быть использована для управления им.
Наиболее близким к предлагаемому по технической сущности является подвеска грузозахватного устройства содержащая сдвоенный полиспаст, соединенный с канатным барабаном грузоподъемного механизма крана и включающий в себя верхние и нижние блоки, огибаемые канатом СЗ.
Недостатком известного, устройства является невысокая надежность работы из-за сложности механизма управления захватным устройством.
Цель изобретения - повышение надежности в работе.
Поставленная цель достигается тем, что подвеска грузозахватного устройства, содержащая сдвоенный полиспаст, соединенный с канатным барабаном грузоподъемного механизма крана и включающий в себя верхние и нижние блоки, огибаеглые канатом, подвешенные к полиспасту грузозахватное устройство и механизм управления грузозахватным устройством, снабжена рамами, на одной из которых посредством оси установлены нижние блоки полиспаста, упорами, жестко закрепленными на раме корпуса, коническими зубчатыми колесами, соединенными посредством упругих муфт с нижними блоками полиспаста, и вертикал ным штоком, нижний конец которого взаимодействует с грузозахватным устройством, а верхний снабжен конической шестерней для зацепления с коническими зубчатыми колесами, при этом другая рама установлена в первом корпусе с возможностью вертикального перемещения относительно ее соединения с грузозахватным устройством.
Кроме того, подвеска может быть снабжена установленными в первой раме прижимными приспособлениями для канатов полиспаста, включающими в себя пары Д1уплечих рычагов, на одном конце каждого из которых установлен подпружиненный ролик, а на другом прижимной ролик для каната, при этом на второй раме хлестко закреплены фигурные упоры для взаимодействия с .подпружиненными роликами.
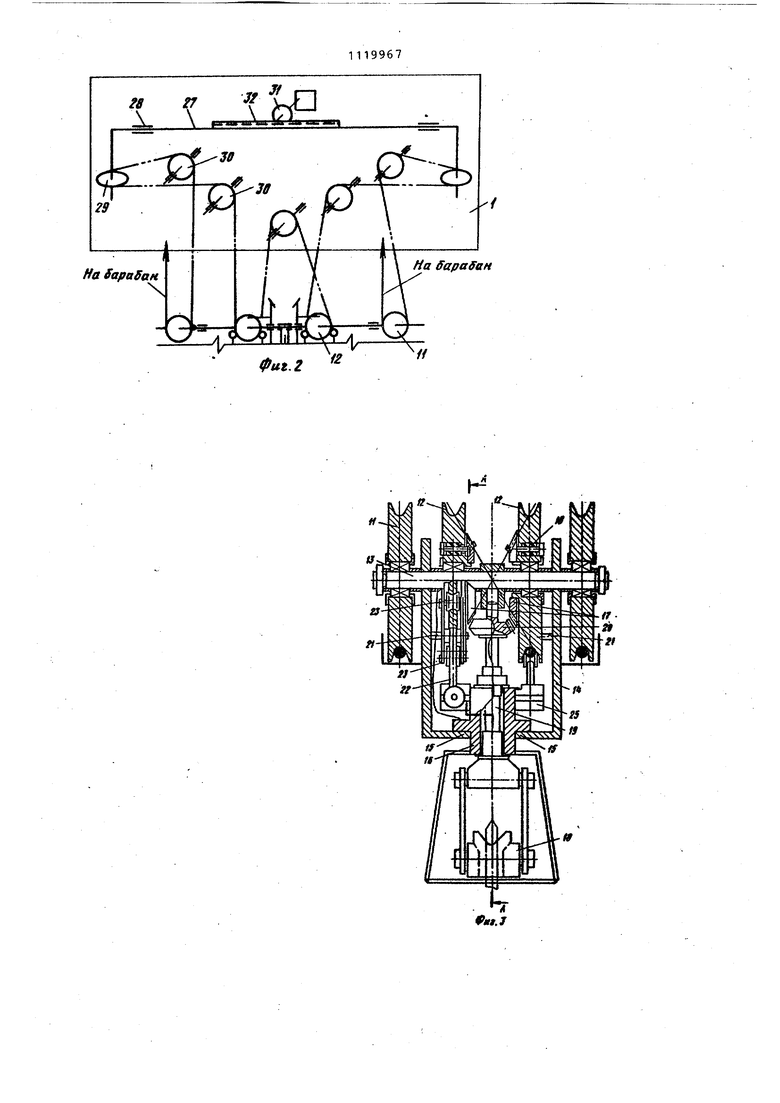
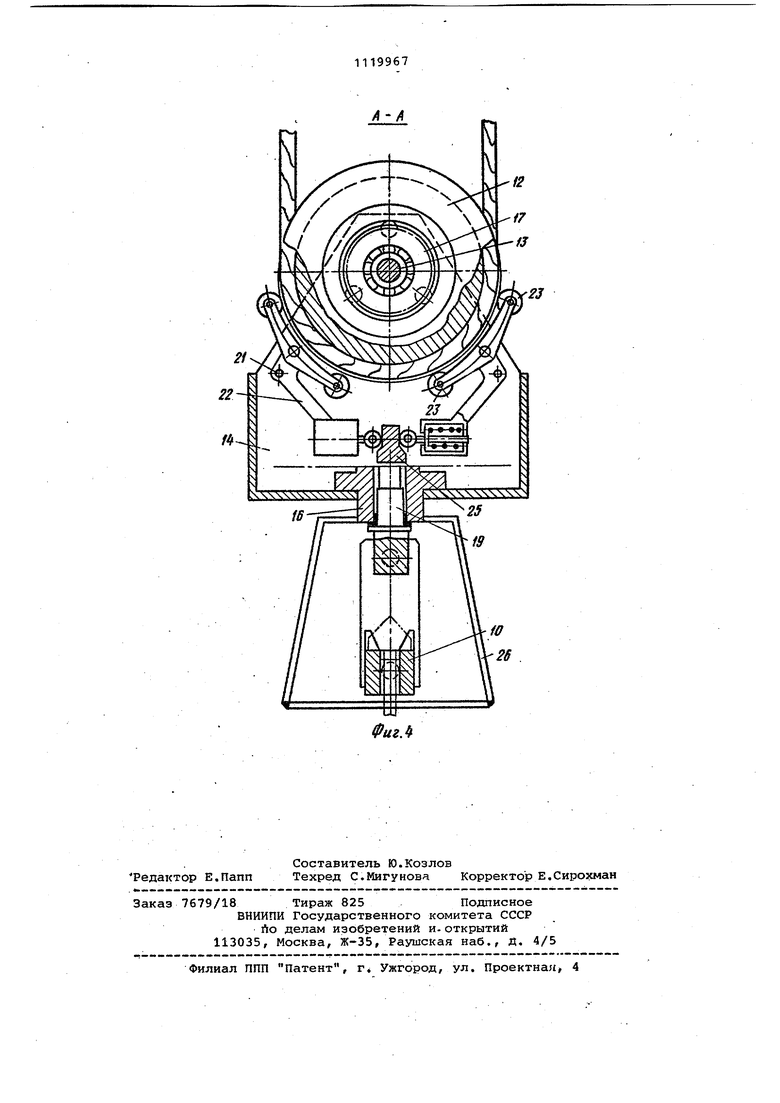
На фиг.1 показана кинематическая схема подвески; на фиг.2 - кинематическая схема механизма управления; на фиг.З - конструкция подвески; на фиг.4 - разрез А-А на фиг.З.
Грузоподъемный механизм состоит из размещенных на раме 1 привода 2 главного подъема, соединенного с канатным барабаном 3, на котором закреплены канаты 4 сдвоенного полиспаста 5 кратностью более трех. Верхние направляющие блоки б полиспаста закреплены на концах траверсы 7, шарнирно установленной на центральной оси 8 и находящейся в кинематической связи с механизмом 9 управления захватом 10, предназначенным для сцепления с грузом, имеющим Т-образный штырь в месте захвата. В качестве варианта захват 10 на подвеске может быть выполнен в виде штыря и, соответственно, поднимаемый груз должен быть оснащен продолговатым гнездом-отверстием.
Нижние блоки 11 и 12 полиспаста 5 установлены с возможностью вращения на оси 13, закрепленной в первой раме 14 подвески, имеющей в нижней части упоры 15, которые могут контактировать с нижним корпусом (рамой) 16 при егодвижении вниз.
К нижним блокам 12, Которые размещены в центре симметрично относительно вертикальной оси полиспаста, присоединены конические колеса 17. Присоединение выполнено на упругих втулках 18.
В нижнем корпусе 16 с возможность вращения относительно вертикальной
оси установлен шток 19 захвата 10. В верхней части штока 19 жестко присоединена коническая шестерня 20, которая выполнена с возможностью сцепления с коническими колесами 17 при смещении второй рамы 16 относительно первой рамы 14 подвески в крайнее верхнее положение.
К первой раме 14 подвески на. осях 21 прикреплены рычаги 22, на коротких концах которых установлены прижимные ролики 23, находящиеся в плоскости блоков 12, а на длинных концах подпружиненно установлены копирные ролики 24,, находящиеся в контакте с направляющими упорами 25, присоединенными к второй раме 16. Конфигурация упоров 25 выполнена так что при смещении второй рамы 16 относительно первой {замы 14 подвески в крайнее нижнее положение ролики 23 отходят, образуя некоторый зазор, от огибающих ручьи блоков 12 канатов .полиспаста .5, а-при смещении второй рамы 16 в крайнее верхнее положение ролики 23 прижимают канат полиспаста 5 к ручьям блоков 12.
К второй раме 16 жестко присоединено основание 26.
По варианту выполнения механизма управления захватом 10 он состоит из каретки 27, которая может перемещаться в направляющих 2S в горизонтальной плоскости. На каретке 27 установлены блоки 29, расстояние между которыми больше расстояния между верхними отклоняющими блоками 30. Каретка 27 перемещается приводом 31, например, по рейке 32.
Грузоподъемный механизм с подвеской-захватом, управляемым основным тяговым канатом, работает следующим образом.
Подъем и опускание подвески с грузом, подвешенным на захвате 10, или без груза производится приводом 2 главного подъема, вращающего барабан 3, выбирающий (.выдающий канат полиспаста 5. При этом вторая рама 16 опущена своим весом (и весом поднимаемого груза ) в крайнее нижнее относительно первой рамы 14 подвески положение и лежит на упорах 15. Направляющие упоры 25 также смещены вн1«з и ролики 24 переведены в положение, при котором рычаги 22, повернувшись на осях 21, обеспечивают некоторый зазор между прижимными роликами 23 и канатами полиспаста 5, огибающими блоки 12.. Шестерня 20 выведена из зацепления с коническими колесами 17, которые вращаются вместе с блоками 12 при перемещении подвески по вертикали, не влияя на положение захэата,
При этом возможен поворот в плане Подвешенного груза внешним.воздействием на любой требуемый угол за счет проворачивания штока 19 на своих подгнипниках во второй раме 16,
Для сцепления с поднимаемым грузом подвеску опускают на его штырь. При этом заплечики Т-образной пики и болы.чая длина прололгов..атого отверстия захвата 10 должны быть сориентированы по одной оси в плане. После попадания штыря в гнездо захвата 10 основание 26 садится на посадочную поверхность груза и останавливается. Вместе с ним останавливаются присоединенные к нему захват 10, шток 19 с шестерней 20, вторая рама 16 с направляющими упорами 25. Дальнейшее ослабление канатов полиспаста 5 сопровождается просадкой первой рамы 14 подвески с присоединенными к нему узлами относительно остановившейся второй рамы 16. При этом ролики 24, прокаты- ваясь по направляющим упорам 25, поворачивают рычаги 22 на осях 21 так что прижимные ролики 23 зажимают канаты полиспаста 5 в ручьях блоков 12 Дальнейшее опускание верхней рамы 14 вводит конические колеса 17 в зацепление с шестерней 20, после чего взаимные перемещения по вертикали элементов подвески прекращаются.
Включением механизма 9 управления траверсу 7 псэворачивают на некоторый угол, вызывая тем самым прокатывание каната полиспаста 5 по ручьям блоков 12, поворот их и связанных с ними конических колес 17, в свою очередь шестерней 20 поворачивающих шток 19 с захватом 10 на 90 в положение сцеплено. После этого механизм 9 управления отключается и включается на подъем механизм 2 главного подъема.
Поворот захвата 10 производится за счет перемещения каретки 27 по направляющим 28 приводом 31
При подъеме вначале первая рама 1 подвески с присоединенными к ней узлами поднимается, конические колеса 17 выходят из зацепления с шестерней 20, в дальнейшем рычаги 22 отводят ролики 23 от канатов полиспаста 5, упоры 15 подхватывают нижний корпус 16 со штоком 19, захватом 10 и висящим на нем грузом.
Расцепление захвата 10 с грузом прои3водится аналогично.
Предлагаемое изобретение позволяет обеспечить работу захватного органа без подвода к нему энергии и исключить при этом произвольное освобождение груза при ослаблении грузовых канатов.
Т--1Ш-.
фиг. 2
Ma SapaSttH
11
Х-/4
12
Фиг Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для подъема и разворота грузозахватного органа | 1980 |
|
SU948844A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
