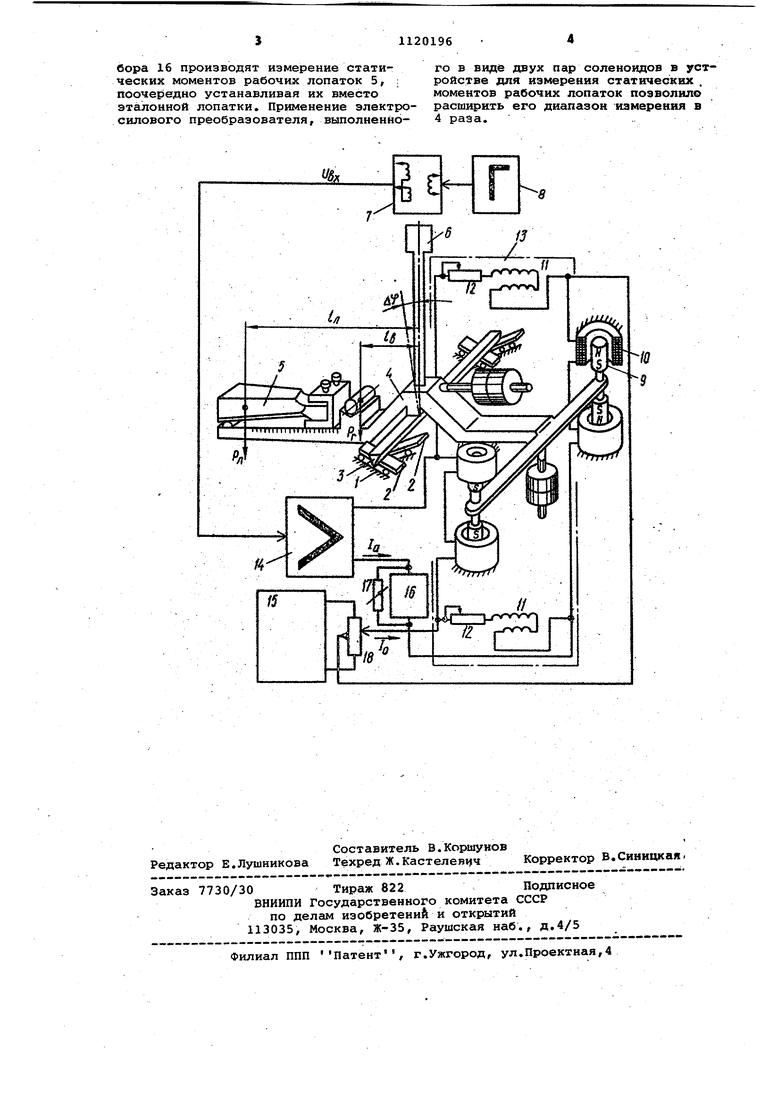
сг: Изобретение относится к машиностроению и может быть использовано для измерения статических моментов рабочих лопаток роторов турбомашин. Известны рйчажные весы для взвеш вания лопаток, содержащие основание установленное на нем посредством призмы коромысло, несущее две чашки положение которых на коромысле определяется призмами Cl. Недостатком устройства является отсутствие учета смещения центра масс рабочей лопатки от номинального положения при определении ее весовой характеристики. Наиболее близким к предлагаемому является устройство для изменения с тических моментов рабочих лопаток р торов турбомашин, содержащее основа ние, установленное на нем посредст. вом опорной призмы коромысло и систему измерения, включающую связанны с коромьаслом электросиловой преобра зователь и датчик положения коромыс ла Сг;/. Недостатком известного устройств является узкий диапазон измерения Ьтатических моментов рабочих лопато обусловленный наличием только одной силовой катушки. Цель изобретения - расишрение диапазона.измерения устройства для измерения статических моментов. Поставленная цель.достигается тем, что устройство для измерения статических моментов рабочих лопаток роторов турбомшг ин, содержащее основание, установленное на нем посредством опорной призмы коромысло и сис тему измерения, включающую связанные с коромыслом электросиловой преобра зова,тель и датчик положения коромыс ла, снабжено сумматором и блоком коррекции нуля. Включенными в систему измерения, а электросиловой преобразователь выполнен в виде двух пар соленоидов, установленных на основании, и двух пар постоянных магнитов, закрепленных на коромысле и взаимодействующих с соленоидами. На чертеже представлена схема конструкции устройства для измерения статических моментов рабочих лопаток турбомашин. Устройство содержит с/снование 1, на котором размещешл опоры 2, на которые устанавливается призма 3, коромысло 4 с замком для закрепления измеряемой лопатки 5, Коромысло 4 снабжено флажком 6, взаимодействующим с электрическим датчиком 7 положения коромысла, подключенным к генератору 8 возбуждения. По обе стороны коромысла 4 закреплены две пары постоянных магнитов 9, взаимодействующих с неподвижными соленоидами 10,.установленными на основаНИИ 1. Постоянные магниты 9 вместе с соленоидами 10 образуют электросиловой преобразователь., Соленоиды 10, соединенные с эквивалентными бйфилярными катушками 11 с регулировочными сопротивлениями 12, образуют мост 13, уравновешенный по активному и реактивному сопротивлению. Мост 13 является сумматором электрических сигналов Лр, и 3, , подаваемых от уравновешенного усилителя 14 и от блока 15 коррекции нуля.Соленоиды 10 попарно, включены в противоположные плечи моста 13,к одной диагонали которого подключен зашунтированный шунтом 17 показывающий прибор 16, к второй диагонали подключен блок 15 коррекции нуля через регулятор 18 тока. Устройство для измерения статических моментов рабочих лопаток работает следующим образом. В исходном положении в замок коромысла 4 устанавливается измеряемая эталонная лопатка 5. При этом коромысло 4 устанавливают в положение близкое к горизонтали, при котором угол смещения флажка б относительно электрического датчика 7 положения коромысла близок к нулю ( л Ч - 0) . Далее, путем ввода корректирующего тока УГ, от блока 15 в мост 13 коромысло 4 плавно устанавливается в точное горизонтальное положение ( л Ч 0) , при этом показания отсчитывающего прибора доводят до нуля. Градуировка шкалы показыванвдего прибора 16 производится следующим образом. На призму коромысла 4 устанавливается цилиндрическая гиря массой РГ, при этом коромысло 4 вместе с флажком 6 отклоняется на угол дЧ и электрический датчик 7 положения коромысла вырабатывает электрический сигнал VPX, который после усиления в усилителе 14 поступает в диагональ моста 13 и увеличивает ток в катуш ках соленоидов 10. Получаемая при этом электромагнитная сила взаимодействует с четырьмя постоянными магнитами 9 и возвращает коромысло 4 в положение равновесия. После установки на призму цилиндрической гири и возникновения уравновешиванвдего-тосоответствующего заданному градуировочному моменту , производится регулировка масштаба показывающего прибора 16 с помощью регулировки шунта 17 Wrp K3o, ,: где К - масштабный коэффициент; Eg - расстояние от центра масс цилиндрической гири до оси призмы; Эа - величина уравновешивающего тока. После проведения операций тарировки коромысла 4 и показывающего прибора 16 производят измерение статических моментов рабочих лопаток 5, : поочередно устанавливая их вместо эталонной лопатки. Применение электросилового преобразователя, выполненного в виде двух пар соленоидов в устройстве для измерения статических . моментов рабочих лопаток позволило расширить его диапазон измерения в
4 раза. ..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения статического момента массы лопаток турбомашин | 1988 |
|
SU1608445A1 |
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1420417A1 |
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1456795A1 |
| Устройство для измерения статических моментов лопаток ротора турбомашины | 1985 |
|
SU1257418A1 |
| Устройство для определения моментного веса изделий | 1979 |
|
SU859824A1 |
| Весы | 1982 |
|
SU1137324A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО МОМЕНТА ТЕЛА | 2006 |
|
RU2332650C1 |
| Устройство для измерения статического момента лопатки | 1984 |
|
SU1188552A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТАТИЧЕСКИХ МОМЕНТОВ РАБОЧИХ ЛОПАТОК РОТОРОВ ТУРБОМАШИН, содержащее основание, установленное на нем посредством опорной призмы коромысло и систему измерения, включающую связанные с коромыслом электросиловой преобразователь и датчик прложения коромысла, о т л и ч а ю ц е е с я тем, что, с целью расширения -диапазона измерения статических моментов, оно снабжено сумматором .и блоком коррекции нуля, включенными в систему измерения, а электросиловой преобразователь выполнен в виде двух пар соленоидов, установленны х цз. основании, и двух пар постоянных маггнитов, закрепленных на коромысле и взаимодействующих с соленоидами.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Коромысловые весы инспекторского типа | 1925 |
|
SU2506A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидравлическая тяговая головка к протяжному станку | 1947 |
|
SU72609A1 |
| Калькодержатель СПО Прогресс Калининск.ой области (прототип) . | |||
