Изобретение относится к машиностроению и быть использовано при измерении статических моментов рабочих лопаток роторов турбомашин.
Целью изобретения является повышение точности и производительности за .счет снижения времени переходных процессов, исключения нелинейности в системе измерения и субъективных ошибок при обработке результатов.
На чертеже показана схема устройства для измерения статических моментов рабочих лопаток ротора, турбома111ИНЫ.
Устройство для измерения статических моментов рабочих лопаток ротора турбомашины содержит основание 1; размещенные на нем посредством шариков 2 опоры 3; размещенное на опокием 1 посредством стоек 21, и концевого выключателя 22, взаимодействующего через шток 18 с эксцентриком 15; датчик рассогласования, выполнен5 ный в виде первичной обмотки 23, соединенной с источником переменного тока (не показан), связанного с коро- мь Слог 5 сердечника 24 и вторичной .обмотки 25; измерительную систему,
iO выполненную в виде последовательно соединенных операционного усилителя 26. два взаимно инверсных входа которого через встречно включенные диоды 27 соединены одновременно с обоiS ими выходами вторичной обмотки 25, ии7 егратора 28 и сумматора-усилителя 29 мощности, .второй вход которого соединен с выходом операционного уси- лите.пя 26, а выход с входом соленорах 3 посредством призкы 4 выполнек- 0 ида 13, дополн.ительной линеаризирую- ное из немагнитного материала коро- щей катушки 30, размещенной на пос- мысло 5, снабженное регуляторами 6 тоянном магните 14 и подключенной и 7 положения центра масс, закреплен- последовательно к соленоиду 13, и
HbiNjH на плечах коромысла 5 опорной планкой 8 и дополнительной призмой 9, ось дополните.льной призмы 9 совпадает с осью симметрии корот-шсла 5| размеа;енный в плоскости качания коромысла 5 маспяный демпфер, выполненный в виде поршня 10, жестко закрепленного на корО№1 сле 5, и корпуса 11, закрепленного на основании 1 посредством электроизолирующей прокладки 12; кo шeнcaциoнпyJo систему, вылолненную в виде закрепленного на коро- 35 вь ходами микроЭВМ 34, двуксторон мысле 5 соленоида 13 и постокнпого магнита 14, закрепленного соосно с соленоидом 13 на основании 1; узел фиксации и ориентирования кором.ысла 5, выполненный в виде размеш;енного на основадап I с возно5киость;ю поворота в плоскости, ггерпендлкулярной основанию эксцентрика 15, подпрулш- ненного вдоль оси штока 16,. взаимодействующего в момент фикса1,ии и ори- 45 торов 36 и 37 и инверсным выходом
ентирования одновременно с эксце.нт- риком 15 посредством располозкенного в плоскости рабочей кромки ппм.зшл 4 шарика 17 с коромыслом 5. второго подпрузкинемного вдоль оси штока 18, взаимодействующего с зксдентриком 15. двух упоров 19 со сферической опорной поверхностью, взаимодействующих с опорной планкой 8, упора 20 с конической поверхностью, взаимодействующего с дополнительной призмой 9, упоры 19 и 20 выполне1Сы из неьшгнитного материала и жестко сказаны с основа2374182
кием 1 посредством стоек 21, и концевого выключателя 22, взаимодействующего через шток 18 с эксцентриком 15; датчик рассогласования, выполнен5 ный в виде первичной обмотки 23, соединенной с источником переменного тока (не показан), связанного с коро- мь Слог 5 сердечника 24 и вторичной .обмотки 25; измерительную систему,
iO выполненную в виде последовательно соединенных операционного усилителя 26. два взаимно инверсных входа которого через встречно включенные диоды 27 соединены одновременно с обоiS ими выходами вторичной обмотки 25, ии7 егратора 28 и сумматора-усилителя 29 мощности, .второй вход которого соединен с выходом операционного уси- лите.пя 26, а выход с входом соленосвязанных с линеаризирующей катушкой 30 параллельно включеннь Х измери- Ti;i;ibHoro резистора 31, аналого-цифрового преобразователя 32 и стрелочного индикатора 33; блок передачи данных в икроЭБМ 34, выполненный в виде 1 1ультиплексора 35 j вхо,цы которого соединены с выхо;: ам 1 анапого-циф- рового преобразователя 32, а выходы - с )зходами микроэвм 34, двух дешифра- торюв 36 и 37.- входа которых связаны
кего компаратора 38,, один из входов которого соединен с выходом операционного усилителя 26, а второй пос- ред ством регулируемого ргзисторного делителя 39 - со стабил ьзированным источником питания (не показан)., двух триггеров 40 и 41 типа RS, S-вход тригтера 40 соединен с выходами двухстороннего компаратора 38, дешифратриггера 41, R-вход триггера 40 соединен с выходом NMKpo3BM 34s S-вход триггера 41 соединен с выходом триггера 40, а R-вход триггера 41 соеди50 кен с концевым вьп лючателем 22, логического злемента 42 И Ш1И-ИЕ, вхо- д,ы которого св.язаны с выходами дешифраторов 36 и 37 и триггера 40, а выход - с входом ьшкроЭВМ 34, последо55 ватбльно соединенных логического элемента 43 И, ВХО.ДЫ которого соедине.ны соответствепно с выходами дешифратора 37 и триггера 41 , л сигнальной лампы 44.
Устройство для измерения статических моментов лопаток ротора турбома- пшны работает следующим образом.
Перед измерением статических моментов лопаток в микроэвм 34 загру- жается программа ввода информации и обработки результатов измерений, которая выполняет усреднение нескольки измеренных значений статических моментов одной и той же лопатки 45, на копление определенных значений в памяти микроэвм и распределение лопаток по пазам диска, предусматривающая обращение к блоку передачи данных в микроэвм 34. При зтом на вы- ходе микроэвм 34 устанавливается в единичное состояние сигнал В Ь, сви- детельствуюпщй о готовности микроЭБМ принять информацию.
Выход логического элемента 42 И-ИЛИ-НЕ является сигналом сопровождения информации (СИП), разрешающим микроэвм 34 ввод информации, и формируется при наличии единичного выхода дешифратора 36 и одновременно нулевого выхода дешифратора 37 и при одновременном единичном состоянии выходов дешифратора 37 и триггера 40.
Сигнал 6 Ь устанавливает-ш нулевое состояние триггер 40, что обус- лавливает нулевое состояние сигнала СИП, свидетельствующее об отсутствии результатов измерения, при этом триггер 4 устанавливается в единичное состояние.
Одновременно с сигналом Вь на выходе микроэвм устанавливается байт запроса информации, старшая -тетрада которого поступает на дешифратор 36, а младшая - на дешифратор 37, причем одновременно два-младших бита младшей тетрады поступают на мультиплексор 35, на выходе которого в ответ на это устанавливается та тетрада.информации из поступающих на вход муль типлексора 35 с анапого-цифрового преобразователя 32, номер которой в двоичном виде совпадает с поданными на вход мультиплексора 35 младшими битами младшей тетрады байта запроса информации. Единичные значения с выходов дешифраторов 36 и 37 поступают на S-вход триггера 40 и на входы логических элементов 42 и 43, однако, так как триггер 41 находится в еди- ничном состоянии, то триггер 40 - в нулевом и, следовательно, сигнал СИП не вырабатывается, при этом на входы логического элемента 43 И поступают два единичных сигнала.
При поступлении на входы логического элемента 43 И двух единичных сигналов зажигается сигнальная лампочка 44, которая является сигналом оператору для установки измеряемой лопатки 45 на коромысло 5. Оператор устанавливает измеряемую лопатку 45 и поворачивает эксцентрик 15 для освобождения коромысла 5 от упоров 19 и 20. При повороте эксцентрика 15 замыкается концевой выключатель 22, в результате чего триггер 41 устанавливается в нулевое состояние, а коромысло 5 под действием статического момента лопатки 45 отклоняется от положения равновесия, в результате чего на выходе вторичной обмотки 25 датчика рассогласования устанавлива ется сигнал, пропорциональный отклонению коромысла 5.
Однополярные полупериоды выходного напряжения через диоды 27 подаются на прямой и инверсный входы операционного усилителя 26, который усиливает разность выходных напряжений с учетом знака. Величина и полярность сигнала зависит от величины и направления отклонения коромысла 5. Далее сигнал поступает через интегратор 28 на сумматор -усилитель 29 мощности, где усиливается, и на соленоид 13..
Между соленоидом 13 и постоянным магнитом 14 возникают электромагнит- нитные силы, которые стремятся вер нуть коромысло 5 в положение равновесия, т.е. в состояние при котором отсутствует сигнал на входе и, соответственно, на выходе операционного усилителя 26. После соленоида 13 сигнал проходя линеаризирующую катушку 30, поступает на измерительный резистор 31 и одновременно на аналого-цифровой преобразователь 32, где осу-, ществляется преобразование аналогового сигнала в дискретный цифровой код, например двоично-десятичный код 1-2-4-8, при этом каждая цифра результата измерения представлена одной тетрадой, результаты преобразования поступают на вход мультиплексора 35.
С выхода операционного усилителя 26 сигнал поступает также на вход двухстороннего ко.мпаратора 28, который сравнивает поступающий сигнал с
S
эталон1-{ым, снимаемым с резисторного делителя 39. Как только разница сравниваемых сигналов станет меньше порога срабатывания (чувствительности) компаратора, на его выходе установится единичный сигнал,
. Единичный сигнал с выхода ратора поступает на S-вход триггера 40s т.е. все четырех сигнала, поступающие на S-вход триггера 40 принимают единичное значение, в результате чего триггер 40 перейдет в единичное состояние. Единичный сигнал, триггера 40 поступает на логический элемент 42 И-ИПИ-НЕ, в результате чего на его выходе устанавливается нулевой сигнал, так как выходы дешифраторов 36 и 37 установлены в единичное состояние.
Нулевой выход логического элемента 43 И-ИЛИ-НЕ является сигналом СИП, т.е. сигналом сопровождения вводимой в микроэвм информации, разрешающим ввод данных. По сигналу СИП микроэвм 34 вводит тетраду информации которая в данный момент установлена на выходе мультиплексора 35, т.е. первую цифру результата измерения
Для ввода второй и последующих цифр результата измерения байт запроса информации программным путем увеличивается на единицу. В этом случае на выходе дешифратора 37 устанавливается нулевое значение, поскольку младший байт запроса информа- Щ1и отличен от нуля. Наличз-ie одновременно на дешифраторах 36 и 37 соответственно единичного и нулевого значений автоматически формирует сигнал СИП на выходе логического элемента 42 И-ИЛИ-НЕ. Одновременно с этим два младших бита мла даего баРгга информации, поступаюгщ е на мультиплексор 35, инициируют коммутацию следующей тетрады информации, посту- палощей на вход мультиплексора 35 с выхода аналого-цифрового преобразователя 32, номер которой совпадает с поступившими битами.
Увеличивая на единицу заданное число раз байт запроса информации программным путем, осуществляют считывание всех тетрад информации, т.е всех цифр результата измерения. Увеличив на единицу один из двух старг- щих битов maдшeй тетрады байта запроса информации и вновь повторив опрос тетрад результата измерения.
574186
например с заданным интервалом мени, превышающим время преобразования аналогового сигнала в цифровой, можно осуществить заданное число счи- 5 тываний результата измерения с последующим его усреднением, при этом считывание будет осуществляться автоматически, поскольку сигнал СИП вырабатыется нулевым выходом дешиф- 10 ратора 37 и единичным выходом дешифратора 36. После считывания заданного числа раз результатов измерения и их усреднения произойдет повторное- обращение микроЭВМ 34 к блоку пере15 дачи данных при нулевом значении
мла.цшей тетрады байта запроса информации, что приведет к загоранию сигнальной лампы 44, свидетельствующей о необходимости установки новой изме- 20 ряемой лопатки. После измерения и ввода статических моментов все лопатки будут расставлены по пазам диска оптимальным образом.
Положительньга эффект заключается
25
в повьппении производительности и точности измерений. Масляный демпфер существенно снюкает время пере:5 одных процессов до установки коромысла в устойчивое положение. Уменьшению вре- мени переходных процессов способствует таклсе и дополнительная связь входа сумматора-усилителя 29 мощности с выходок операционного уси.пителя 26, так как существенно увеличивает уравновешивающий ток, поступающий на соленоид 13 в начальный момент вре- м€;ни. Линеаризирующая катушка 30, подключенная последовательно соленоиду 13, повьшхает точность измере- кия, поскольку позволяет компенсировать свойственную магнитной системе с постоянным магнитом нелинейность между величиной тока соленоида и тя- нушдм усилием в широком диапазоне значений измеряемых статических моментов. Наличие блока передачи данных в 1-шкроЗВМ позволяет существен- но повысить производительность труда за счет исключения таких операций (при условии применения ЭВМ для раскладки лопаток), как запись данных в протоколе измерений, перенесение их на машинный носитель, например, перфокарты или перфоленту с дальнейщим вводом в ЭВМ. Измерять же статические моменты лопаток без использования ЭВМ для их раскладки нецелесообразно. Kpoivie того, передача данных в ЭВМ обеспечивает повьшение точности измерения в результате исключения субъективных ошибок, связанных с неточным отсчетом показаний и ошибками при записи и перфорации результатов измерения. Дешифратор в блоке передачи данных идентифицирует старшую тетраду байта запроса информации, которая является условным адресом устройства, что повышает производительность труда, так как позволяет использовать одну микроЭВМ для обслуживания нескольких устройств измерения статических моментов, путем ис ключения времени, связанного с обслуживанием нескольких микроЭВМ вместо одной Второй дешифратор, идентифицирует младшую тетраду байта запроса информапии, что повьш1ает точность измерений, поскольку позволяет организовать автоматическое считывание нескольких подряд следуюпщх результатов измерения (с интервалом времени, превьш1аюшд1М время преобразования сигнала из аналогового вида в цифровой код), Осреднение нескольких результатов измерения одной лопатки практически исключает случайные ошибки, связанные со схемой измерения и случайными внешними воздействиями.
Формула изобретения
Устройства для измерения статических моментов лопаток ротора турбо- машины, содержащее основание, закрепленную на нем опору, установленное на ней посредством призмы коромысло, компенсационную систему, включающую постоянный магнит и соленоид, систему измерения и датчик рассогласования, отличающее-. с я тем, что, с целью пoвьшJeния точности и производительности, оно снабжено размещенным в плоскости качания коромысла масляным демпфером, выполненным в виде корпуса, закрепленного на основании посредством электроизолирующей прокладки, и поршня, связанного с коромыслом, узлом фиксации и ориентирования коромысла, выполненным в виде эксцентрика, расположенного на основании с возможностью поворота в плоскости, перпендикулярной основанию,двух взаимодействующих с эксцентриком подпружиненных вдоль оси штоков, первый из которых предназначен для взаимодействия одновременно и с коромыслом посредством шарика, расположенного в плоскости рабочей кромки призмы, установленных на плечах коромысла опорной планки„и дополнительной призмы, ось которой размещена в плоскости качания коромысла, трех жестко связанных с основанием посредством стоек упоров, два из которых имеют
сферическую опорную поверхность и предназначены для взаимодействия с опорной планкой, а третий имеет коническую опорную поверхность и предназначен для взаимодействия с дополнительной призмой, и концевого выключателя, взаимодействующего через второй шток с эксцентриком, и блоком передачи данных в микроэвм, выполнена ным в виде мультиплексора, первый
вход которого предназначен для соединения с выходами микроэвм, а выхог- ды - с входами микроЭВМ, двух дешифраторов, входы которых предназначены для соединения с выходами микро.ЭВМ,двустороннего компаратора, один из входов которого предназначен для соединения посредством регулируемого резисторного делителя со стабилизированным источником питания, двух
RS-триггеров, R-вход первого предназначен для соединения с микроЭВМ, S-вход соединен с выходами обоих дешифраторов, двухстороннего компаратора и инверсным выходом второго
триггера, R-вход последнего - с
концевым выключателем, S-вход - с инверсным выходом первого триггера, логического элемента И-ИЖ-НЕ, входы которого соединены с выходами дешифраторов и первого триггера, а выход предназначен для соединения с микро- ЭВМ и последовательно соединенных логического элемента И, первьш вход которого соединен с выходом иторого
дешифратора, а второй - с выходом . второго триггера, и сигнальной лампы, система измерения выполнена в виде последовательно соединенных операционного усилителя, два взаимноинверсных входа которого посредством встречно включенных диодов соединены с двумя выходами датчика рассогласования, интегратора и сумматора - усилителя мощности, второй
вход которого соединен с выходом операционного усилителя и вторым входом двухстороннего компаратора, а выход- с соленоидом расположенной на пос9125741810
тоянном магните линеаризирующей ка-ченных измерительного резистора, интущки, подключенной последовательнодикатора и аналого-цифрового преобjf соленоиду, и связанных с линеари-разователя,выходы которого соединены
эирующей катушкой параллельно вкпю-с вторым входом мультиплексора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вводом информации | 1983 |
|
SU1161949A1 |
| Устройство для отладки программ микроЭВМ | 1989 |
|
SU1815643A1 |
| МИКРОЭВМ | 1991 |
|
SU1819017A1 |
| МИКРОЭВМ | 1994 |
|
RU2108619C1 |
| Устройство для ввода-вывода информации | 1987 |
|
SU1451674A1 |
| Устройство для сопряжения микроЭВМ с внешним устройством | 1985 |
|
SU1283780A1 |
| Многоканальное регистрирующее устройство | 1988 |
|
SU1698899A1 |
| Запоминающее устройство с произвольной выборкой | 1988 |
|
SU1548790A1 |
| Устройство для сбора данных о работе ЭВМ | 1982 |
|
SU1121679A1 |
| Устройство для обмена данными между группой каналов ввода-вывода и оперативной памятью | 1985 |
|
SU1278867A2 |
Изобретение относится к машиностроению и может быть использовано при измерении статических моментов рабочих лопаток роторов турбомашин. . Целью изобретения является повышение точности и произв.одительности за счет ( снижения времени переходных процест-. сов, исключения нелинейности в системе измерения и субъективных ошибок при обработке. Маслянный демпфер,связанный с коромыслом 5 снижает время установления, чему также способствуг ет связь входа сумматора-усилителя 28 мощности с выходом операционного усилителя. Наличие блока передачи данных в ЭВМ позволяет повысить про-; изводительность за счет исключения ряда ручных операций и точность за счет исключения субъективных ошибок. Линеаризирующая катушка способствует повьшению точности измерения, поскольку компенсирует нелинейность тока в соленоиде в широком диапазоне измеряемых статических моментов. 1 ил. О « (Л 4i IND ел 4 00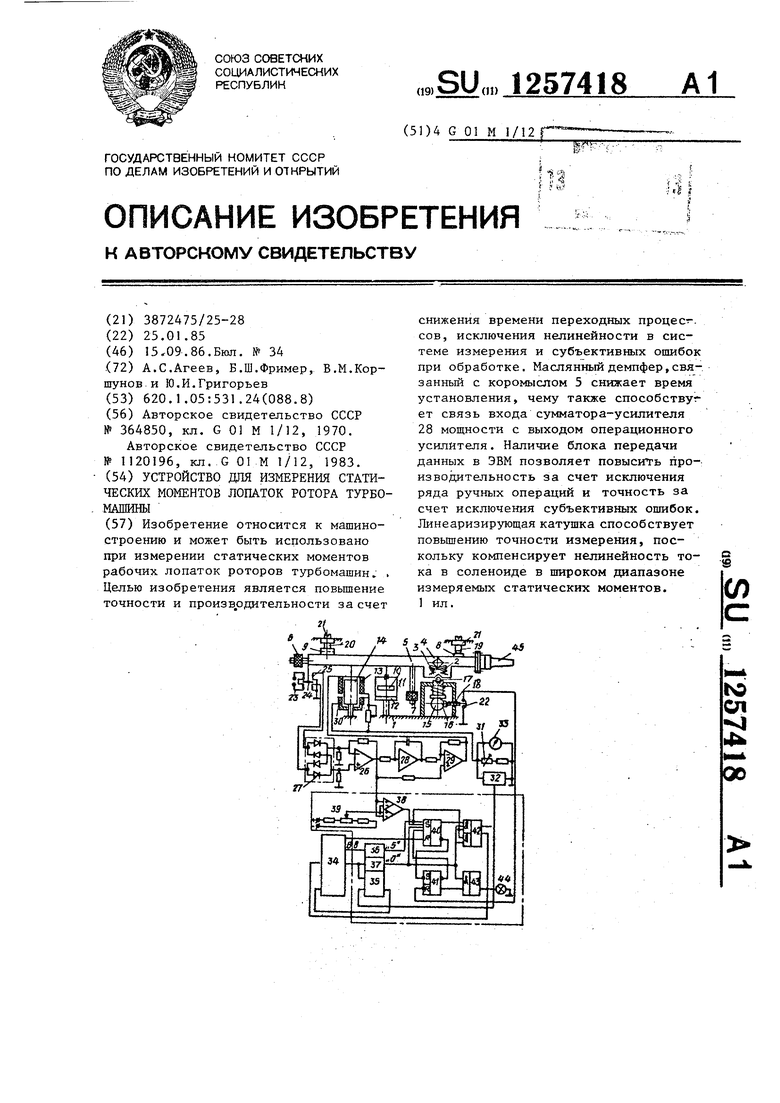
| ВСЕСОЮЗНАЯ | 0 |
|
SU364850A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения статических моментов рабочих лопаток роторов турбомашин | 1983 |
|
SU1120196A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
