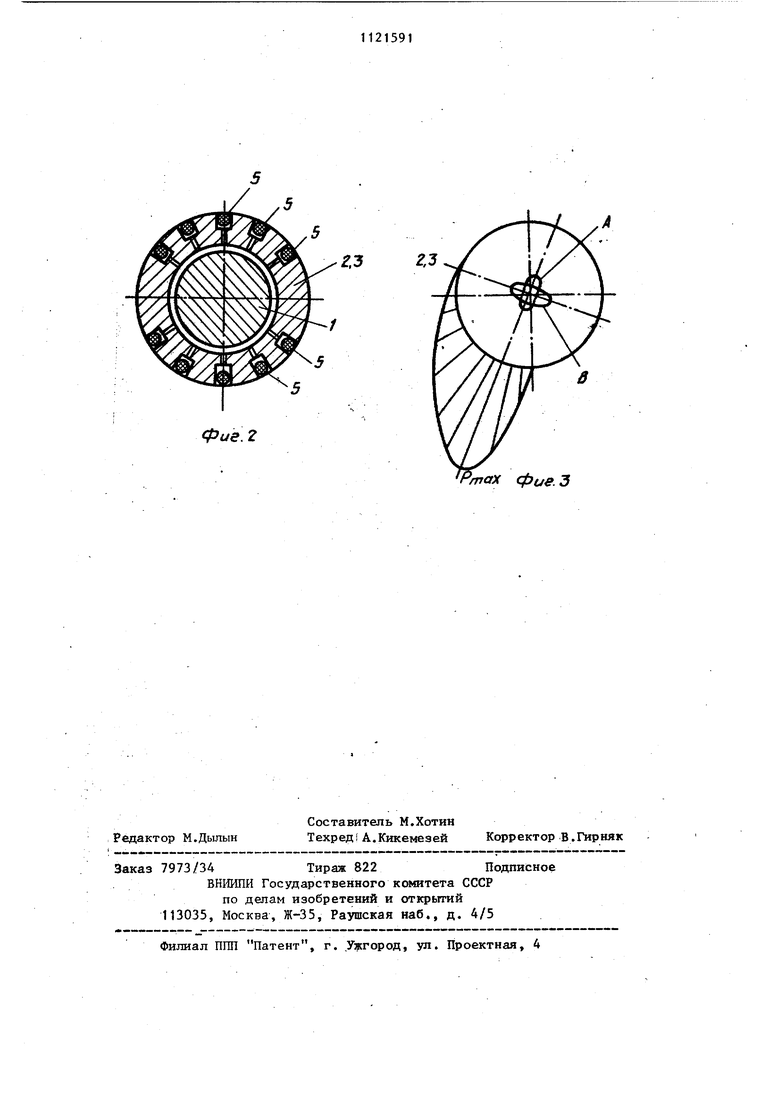
1 Изобретение относится к машиностроению и может быть использовано для уменьшения вибраций, передаваемых с ротора на корпусные элементы машин и механизмов. Известен способ уравновешивания составных роторов, заключающийся в том, что отдельные элементы ротора устанавливаются на балансировочный станок, измеряют амплитуды и вибрацию опор, по которым определяю место и массу уравновешивающих грузов l . Недостатком данного способа явля ется то, что после сборки ротор становится неуравновешенным из-за действия на него возмущающих сил, обусловленных погрешностями зацепления ипи дисбалансом соединительных элементов. Наиболее близким к изобретению является способ уравновешивания зуб чатого ротора с цапфами в опорах скольжения, заключающийся в том, что определяют эллиптическую траекторию движения цапф и устанавливают на ротор корректирующие грузы выбирая- массу и место установки из условия уменьшения полуосей элли тической траектории 2j . Недостатками известного способа являются невысокие точность и эффек тивность ура.вновешивания из-за неточности изготовления геометрическо формы цапф, соизмеримой с замеряемы ми перемещениями. Цель изобретения - повьшение эффективности уравновешивания. Цель достигается тем,то соглас но способу уравновешивания зубчатог ротора с цапфа1 й в опорах скольжения, заключающемуся в том, что опре деляют эллиптическую траекторию дви жения цапф и устанавливают на ротор корректирующие грузы, измеряют гидродинамическое давление в опорах скольжения, опредепяют направление максимального гидродинамического давления, а места и массы корректи рующих грузов выбирают из условия совмещения направления меньшей попу оси эллиптической траектории движения цапфы с направлением максимального гидродинамического давления. На фиг. 1 представлен зубчатый ротор; на фиг. 2 - расположение дат чиков гидродинамического давления в среднем сечении опор скольжения. 12 на фиг. 3 - две из возможных эллиптических траекторий движения цапфы при одних и тех же абсолютных перемещениях. Способ реализуется следующим образом. При колебаниях зубчатого ротора 1, вращакхцегося в опорах 2 и 3 скольжения, с помощью преобразователей 4 перемещений определяют исходную траекторию движения цапф ротора 1. Методом амплитуд и фаз определяют место и массу корректирующих грузов в первом приближении. Одновременно по поканиям датчиков 5 давления регистрируют эпюры гидродинамического давления и фазу направления максимального гидродинамического давления относительно штифта отметчика 6 положения. Затем на ротор в выбранных плоскостях уравновешивания устанавливают корректирующие грузы первого приближения и опять измеряют амплитуду и фазу вибрации по показаниям датчиков 5, определяют исходную неуравновешенность ротора 1 и массы и места установки корректирующих грузов во втором приближении. Затем корректирующие грузы первого приближения заменяют корректирующими грузами второго приближения. Для дальнейшего снижения неуравновешенности ротора, характеризуемой показаниями датчиков 5, используя и датчики 5 давления, и преобразователи 4 перемещения, корректирующие грузы второго приближения смещают по фазе до смещения направления меньших полуосей эллиптических траекторий движения цапф с радиальным направлением максимального гидродинамического давления. Способ основан на том, что сигналы с датчиков гидродинамического давления пропорциональны действующей на опору динамической силе, а фазовый сдвиг между давлением и динамической силой не зависит от величины силы. Предлагаемый способ, предусматриваюшяй оценку динамических сил, передающихся с ротора на опоры по динамическому давлению в масляном клине опор скольжения, позволяет повысить по сравнению с известным способом эффективность уравновешивания в 3-4 раза.
фие.2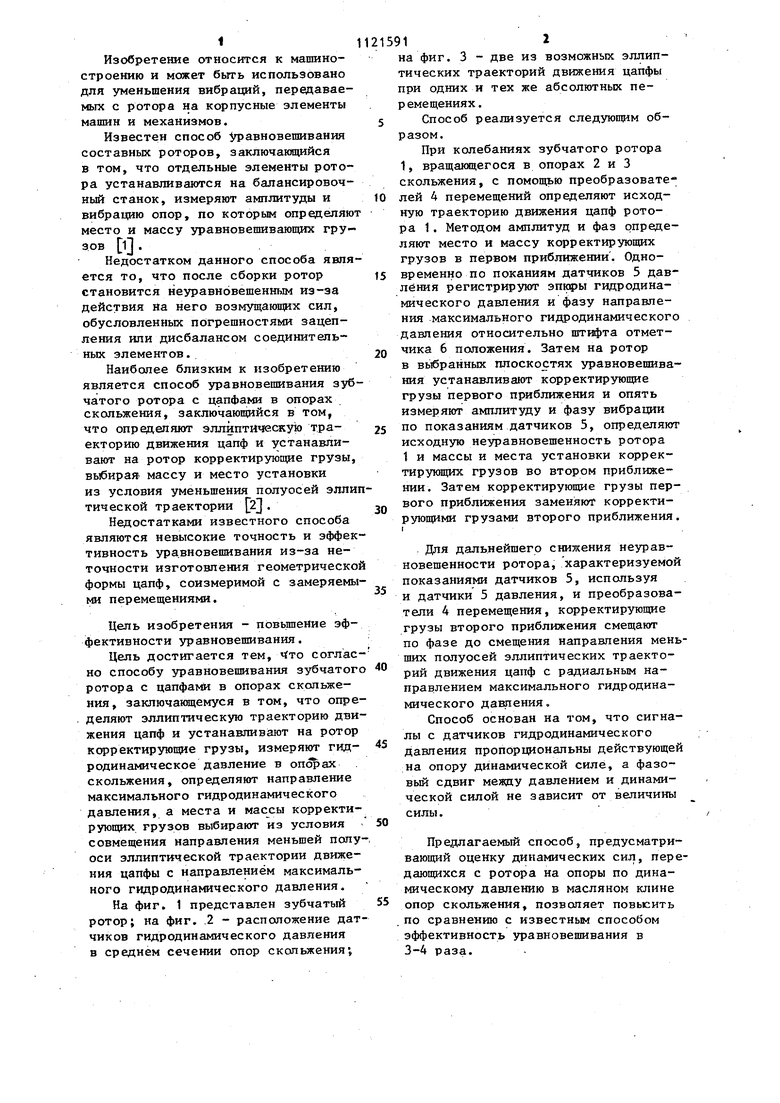
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ ВИБРАЦИОННОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2101689C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| Способ определения динамического дисбаланса ротора авиационного газотурбинного двигателя | 2016 |
|
RU2627750C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО ДИСБАЛАНСА БЫСТРОВРАЩАЮЩИХСЯ ТЕЛ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085847C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Способ балансировки двух роторов в сборе | 1976 |
|
SU611125A1 |
СПОСОБ УРАВНОВЕШИВАНИЯ ЗУБЧАТОГО РОТОРА с цапфами в опорах скольжения, заключающийся в том, что определяют эллиптическую траекторию движения цапф и устанавливают на ротор корректирующие грузы, о тличающийся тем, что, с целью повьш1ения эффективности уравновешивания, измеряют гидродинамическое давление в опорах скольжения, определяют направление максимального гидродинамического давления, а места и массы корректирующих грузов выбирают из условия совмещения направления меньшей попуоси эллиптической траектории движения цапфы с направлением максимального гидроди- (Л намического давления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Основы балансированной техники | |||
| Под редакцией Щепетипьникова | |||
| М., Машиностроение, 1975, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для передачи изображений на расстояние | 1920 |
|
SU171A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3262409, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
